Изобретение относится к медицинской технике, точнее к аппаратам искусственного кровообращения.
Цель изобретения - повышение точности измерения путем учета погрешности, вносимой теплообменом в пневмотракте привода.
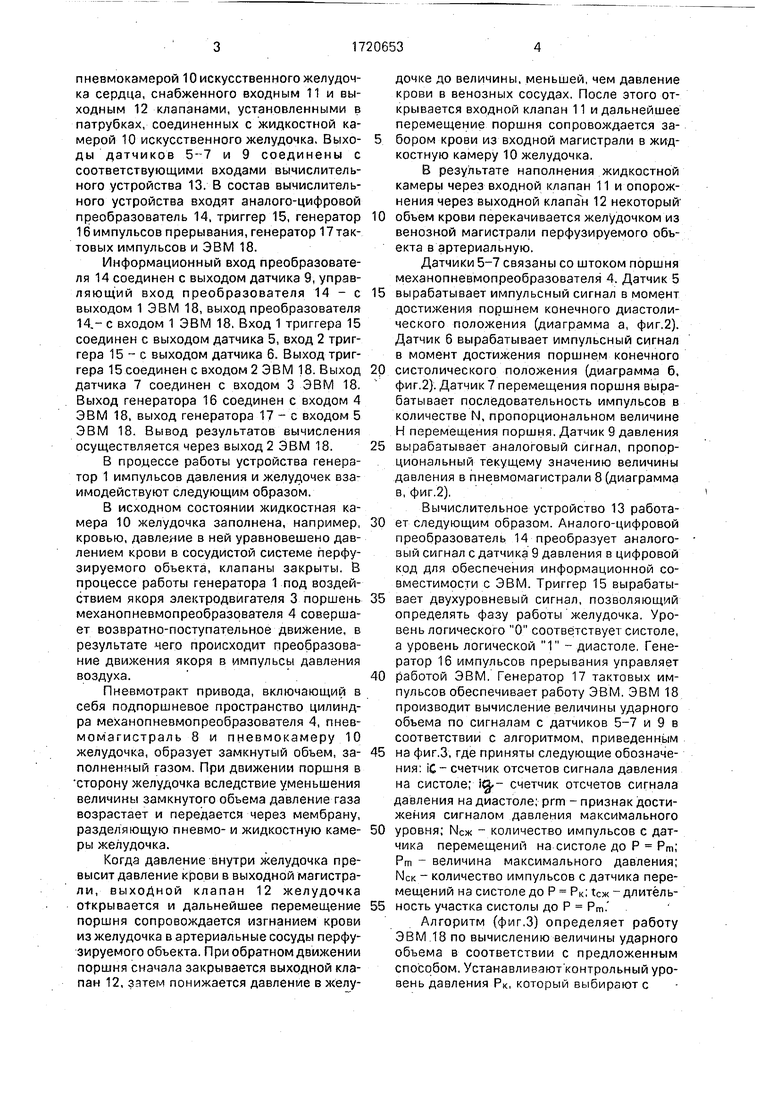
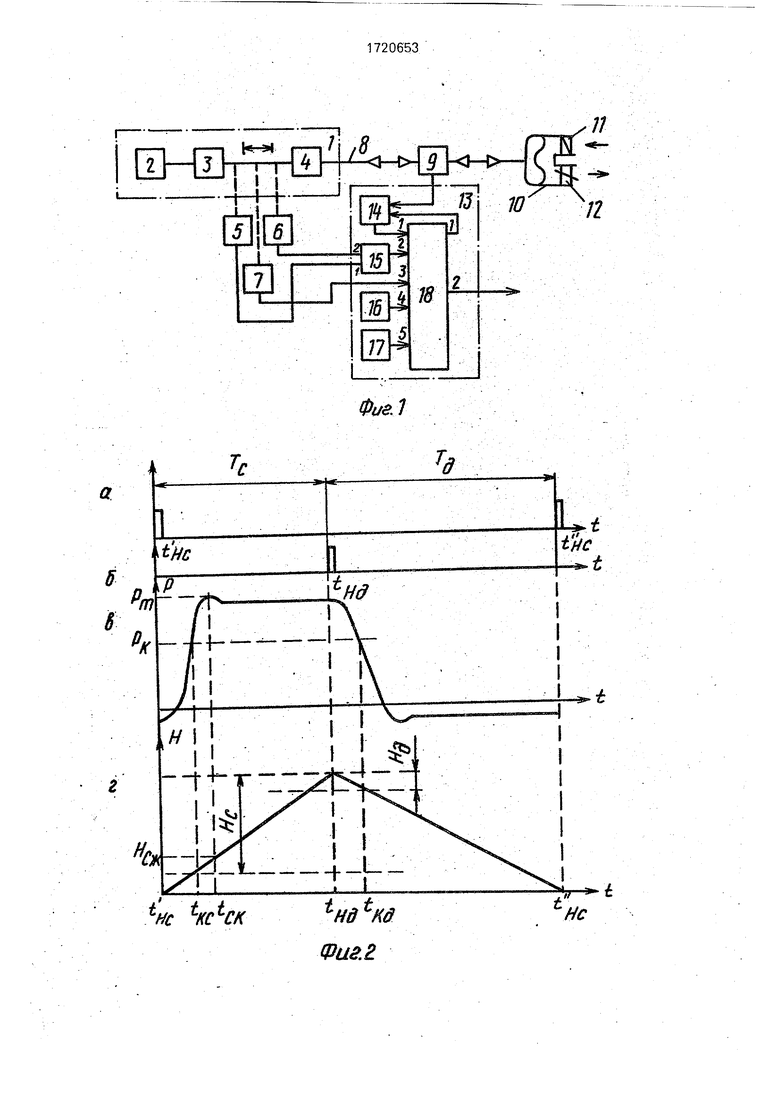
На фиг,1 представлена функциональная схема устройства, реализующего способ измерения производительности искусственного желудочка; на фиг.2 - диаграммы зависимости параметров устройства от времени (а - сигнал tHc с датчика конечного диастол ич ее ко го положения поршня; б - сигнал Лир, начала реверса; в - значение давления Р в пневмотракте; г- величина перемещения поршня Н); на фиг.З - алгоритм
вычисления величины ударного в.ы- броса.
Способ реализуется с помощью устройства (фиг.1), содержащего генератор 1 импульсов давления, включающий в себя блок 2 управления двигателем, линейный электродвигатель 3 и поршневой механопнев- мопреобразователь 4, шток которого жестко связан с якорем электродвигателя 3. Со штоком поршня механопневмопреобразо- вателя 4 связаны датчик 5 конечного диасто- лического положения поршня, датчик 6 конечного систолического положения поршня и датчик 7 перемещения поршня. Пнев- мокамера механопневмопреобразователя 4 посредством пневмомагмстрали 8 через проточный датчик 9 давления соединение
wmit.О
м
Cv
пневмокамерой 10 искусственного желудочка сердца, снабженного входным 11 и выходным 12 клапанами, установленными в патрубках, соединенных с жидкостной камерой 10 искусственного желудочка. Выходы датчиков 5-7 и 9 соединены с соответствующими входами вычислительного устройства 13. В состав вычислительного устройства входят аналого-цифровой преобразователь 14, триггер 15, генератор 16 импульсов прерывания, генератор 17тактовых импульсов и ЭВМ 18.
Информационный вход преобразователя 14 соединен с выходом датчика 9, управляющий вход преобразователя 14 - с выходом 1 ЭВМ 18, выход преобразователя 14,- с входом 1 ЭВМ 18. Вход 1 триггера 15 соединен с выходом датчика 5, вход 2 триггера 15 - с выходом датчика 6. Выход триггера 15 соединен с входом 2 ЭВМ 18. Выход датчика 7 соединен с входом 3 ЭВМ 18. Выход генератора 16 соединен с входом 4 ЭВМ 18, выход генератора 17 - с входом 5 ЭВМ 18. Вывод результатов вычисления осуществляется через выход 2 ЭВМ 18.
В продессе работы устройства генератор 1 импульсов давления и желудочек взаимодействуют следующим образом.
В исходном состоянии жидкостная камера 10 желудочка заполнена, например, кровью, давление в ней уравновешено давлением крови в сосудистой системе перфу- зируемого объекта, клапаны закрыты. В процессе работы генератора 1 под воздействием якоря электродвигателя 3 поршень механопневмопреобразователя 4 совершает возвратно-поступательное движение, в результате чего происходит преобразование движения якоря в импульсы давления воздуха.
Пневмотракт привода, включающий в себя подпоршневое пространство цилиндра механопневмопреобразователя 4, пнев- момагистраль 8 и пневмокамеру 10 желудочка, образует замкнутый объем, заполненный газом. При движении поршня в сторону желудочка вследствие уменьшения величины замкнутого объема давление газа возрастает и передается через мембрану, разделяющую пневмо- и жидкостную камеры желудочка.
Когда давление внутри желудочка превысит давление крови в выходной магистра- ли, выходной клапан 12 желудочка открывается и дальнейшее перемещение поршня сопровождается изгнанием крови из желудочка в артериальные сосуды перфу- зируемого объекта. При обратном движении поршня сначала закрывается выходной клапан 12, затем понижается давление в желудочке до величины, меньшей, чем давление крови в венозных сосудах. После этого открывается входной клапан 11 и дальнейшее перемещение поршня сопровождается забором крови из входной магистрали в жидкостную камеру 10 желудочка.
В результате наполнения жидкостной камеры через входной клапан 11 и опорожнения через выходной клапан 12 некоторый
0 объем крови перекачивается желудочком из венозной магистрали перфузируемого объекта в артериальную.
Датчики 5-7 связаны со штоком поршня механопневмопреобразователя 4. Датчик 5
5 вырабатывает импульсный сигнал в момент достижения поршнем конечного диастоли- ческого положения (диаграмма а, фиг.2). Датчик 6 вырабатывает импульсный сигнал в момент достижения поршнем конечного
Q систолического положения (диаграмма б, фиг.2). Датчик 7 перемещения поршня вырабатывает последовательность импульсов в количестве N, пропорциональном величине Н перемещения поршня. Датчик 9 давления
5 вырабатывает аналоговый сигнал, пропорциональный текущему значению величины давления в пневмомагистрали 8 (диаграмма в, фиг.2).
Вычислительное устройство 13 работа0 ет следующим образом. Аналого-цифровой преобразователь 14 преобразует аналоговый сигнал с датчика 9 давления в цифровой код для обеспечения информационной совместимости с ЭВМ. Триггер 15 вырабаты5 вает двухуровневый сигнал, позволяющий определять фазу работы желудочка. Уровень логического О соответствует систоле, а уровень логической 1 - диастоле, Генератор 16 импульсов прерывания управляет
0 работой ЭВМ. Генератор 17 тактовых импульсов обеспечивает работу ЭВМ. ЭВМ 18 производит вычисление величины ударного объема по сигналам с датчиков 5-7 и 9 в соответствии с алгоритмом, приведенным
5 на фиг.З, где приняты следующие обозначения: 1C - счетчик отсчетов сигнала давления на систоле; icj,- счетчик отсчетов сигнала давления на диастоле; prm - признак достижения сигналом давления максимального
0 уровня; NCX - количество импульсов с датчика перемещений на систоле до Р Рт; Ргл - величина максимального давления; NCK - количество импульсов с датчика перемещений на систоле до Р РК; tcx - длитёль5 ность участка систолы до Р Рт.
Алгоритм (фиг.З) определяет работу ЭВМ.18 по вычислению величины ударного объема в соответствии с предложенным способом. Устанавливают контрольный уровень давления Рк, который выбирают с
учетом следующего условия: величина контрольного уровня давления должна быть больше давления закрытия входного клапана, но меньше давления открытия выходного клапана, т.е. уровень контрольного значения давления должен лежать в диапазоне величин давлений, при которых оба клапана желудочка закрыты..Такое состояние клапанов соответствует периодам предварительного сжатия в систолу и предварительного расширения в диастолу, Далее при непрерывном контроле давления газа в пневмотракте определяют момент достижения текущим значением давления PC в систолу уровня контрольного значения (Рс Рк) и измеряют величину перемещения поршня Нс с этого момента до момента реверса поршня. При обратном движении поршня в диастолу измеряют величину перемещения поршня Н.д с момента реверса до момента достижения контрольного значения давления (Рд - Рк). Таким образом, величину изменения объема, вытесненного поршнем, вычисляют по формуле
AVn-vJA (Hc-Hfl)Sn, где Sn - площадь поперечного сечения поршня.
Предлагаемый способ учитывает изменение объема жидкостной камеры желудочка не только от перемещения поршня, но и от изменения объема газовой камеры желудочка вследствие изменений температуры газа, что приводит к повышению точности измерения.
В соответствии с предлагаемым способом за начало цикла измерения принимают сигнал - 1нс с датчика 5 конечного диастояи- ческого положения поршня (диаграмма а, фиг.2). Текущее значение давления в пневмотракте привода непрерывно измеряют и сравнивают с контрольным уровнем давления (диаграмма б, фиг.2). С момента, соответствующего равенству текущего значения давления ткс в систолу контрольному уровню давления41змеряют величину перемещения поршня Не (диаграмма г, фиг.2). до. сигнала тнд реверса (диаграмма б, фиг.2) и величину перемещения поршня Нд за время от сигнала реверса гад до момента г,кд сравнения текущего значения давления в диастолу с контрольным уровнем давления.
Величину перемещения Н поршня определяют, например, путем умножения числа N на выходе датчика перемещения на коэффициент Кп, равный перемещению
поршня, эквивалентному одному импульсу с датчика перемещения:
н кпм.
Таким образом, изменение объема , 5 вытесненного поршнем, о предел я ют в соответствии с формулой AVn Кп(Мс-Мд)5п.
Для измерения изменения величины объема AVf6 жидкостной камеры вследст- 0 вне теплообмена в пневмотракте выделяют момент 1сж окончания периода предварительного сжатия, например, путем дифференцирования величины давления и : выделения момента равенства нулю произ- 5 водной, определяют объем вытесненный поршнем за период предварительного сжатия, ДУсж KaNcx-Sn, измеряют длительность периода t от момента tex до момента Ткд и вычисляют величину AVfO- по формуле 0 AVTo K KnNc«Sn(1-e bt),
где К-коэффициент пропорциональности. Таким образом, величину ударного объема искусственного желудочка сердца соотг ветственно предлагаемому способу 5 вычисляют по формуле
. Ууд ДУп+К ДУеж().
Формула изобретения Способ измерения производительности .искусственного желудочка сердца, состоя- 0 щци .из измерения в каждом рабочем цикле изменения объема рабочей жидкости в же- по перемещению поршня привода между моментами достижения контрольных значений давления, в желудочке в систолу и 5 диастолу, отличающийся тем, что, с целью повышения точности измерения путем учета погрешности, вносимой теплообменом в пневмотракте привода, измеряют величину изменения объема, вытесненного 0 поршнем за время предварительного сжатия, измеряют время от окончания предварительного сжатия до момента достижения контрольного значения давления в диастолу и вычисляют величину производительности 5 за один рабочий цикл по Формуле
УУд ДУп+ЮДУсж(), где Ууд- производительность желудочка за цикл;
Ауп - изменение объема за время сис- 0 тола-диастола;
A Vex - изменение объема за время предварительного сжатия; t-время;
Ь - коэффициент теплообмена; 5 К-коэффициент пропорциональности.
ФиеЛ

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения производительности искусственного желудочка сердца | 1988 |
|
SU1581322A1 |
| Устройство для измерения давления крови при работе искусственного сердца | 1986 |
|
SU1367937A1 |
| Устройство для управления искусственным сердцем | 1986 |
|
SU1477418A1 |
| ИСКУССТВЕННЫЙ ЖЕЛУДОЧЕК СЕРДЦА И СПОСОБ ЕГО РАБОТЫ | 2007 |
|
RU2360704C1 |
| Аппарат вспомогательного кровообращения | 1980 |
|
SU925348A1 |
| Аппарат вспомогательного кровообращения | 1982 |
|
SU1113132A1 |
| ИСКУССТВЕННЫЙ ЖЕЛУДОЧЕК СЕРДЦА (ВАРИАНТЫ) | 2013 |
|
RU2550047C2 |
| Устройство для определения гемодинамических параметров кровотока в искусственном сердце | 1987 |
|
SU1688888A1 |
| Аппарат вспомогательного кровообращения | 1977 |
|
SU736979A1 |
| Искусственное сердце с пневматическим приводом | 1990 |
|
SU1806755A1 |

Изобретение относится к медицинской технике и может быть использовано в аппаратах искусственного сердца. Цель изобретения - повышение точности измерения путем исключения погрешности, определяемой теплообменом в пневмотракте привода. Сущность способа состоит в том, что измерение производительности искусственного желудочка сердца с поршневым пневмоприводом замкнутого типа производят путем измерения в каждом рабочем цикле изменения объема жидкостной камеры желудочка по перемещению поршня привода между моментами достижения контрольных значений давления в камерах желудочка в систолу и диастолу, объема, вытесненного поршнем за период предварительного сжатия, времени от момента окончания периода предварительного сжатия до момента достижения контрольного значения давления в диастолу и определения величины производительности за один рабочий цикл по формуле + Кх х (), где Vyfl - производительность желудочка за один рабочий цикл; Д Vn - изменение объема, вытесненного поршнем за период между моментами достижения уровня контрольного значения давления в систолу и диастолу; ДУсж изменение объема, вытесненного поршнем за период предварительного сжатия; t- время; b - коэффициент, определяемый теплофизическими параметрами желудочка и газа; К - коэффициент пропорциональности. 3 ил.
1Нд №
Фиг.2.
Не
(Начало )
-jr
Начальные устаноЯхц ) lcg: p;prx; 0;pr.-0
I 8M отсчета
дабления р: Рр
iff: iff+r : I
| Устройство для управления искусственным сердцем | 1986 |
|
SU1477418A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
