Известный геолокатор для акустических всследован1ий Подземных конфигураций «амер, совдаиных вымыванием Соляных залежей, не обеспечивает точной привязии ло азимуту дриемно-излучагощей системы в любой .момент времени.
Применение в нем фотоэлектричеакого ориентира исключает возможность (перемещения на 1кабеле свободно висящего измерительного с-наряда, так как свободное вращение его к-орinyca относительно вертикальной оси и вынужденное вращение акустических систем приводят к неравномерной скорости обзора стенок камеры. Из-за этого искажается форма контура камеры. Отсутств-ие непрерывного сигнала азимута не позволяет автоматизировать систему регистрации -положения электроакустического преобразователя.
Предлагаемый скважинный геолокатор также (Предназначен для определения подземных конфигураций, однако, применение в нем неподвижного относительно корпуса электроаку1ст1ичеокого лреобразователя и вращающегося отражателя, дающего круговой обзор и связанного через многозубцовую магнитную муфту с двигателем обзора, а также размещение чувствительното элемента системы азимутальной (Привязки на оси того же двигателя обзора и наличие -оинхронно следящей системы, передающей данные о направлении локации
на регистрирующую устаиовку, дает более точные результаты измерения и осуществляет непрерывную (Привязку измеряемых сечений к магнитнОМу меридиану. Благодаря наличию калибровочного устройства, включающего акустически полупрозрачный отражатель, расположенный на фиксированном расстоя(Нни под дном снаряда, и (Систему поворота отражателя в момент калибровки, возможны определение iCKOpocTH распространения колебаний в окружающей среде и защита снаряда от ударов о дно камеры, так (Как эта система (Позволяет получать отметки расстояния до дна камеры.
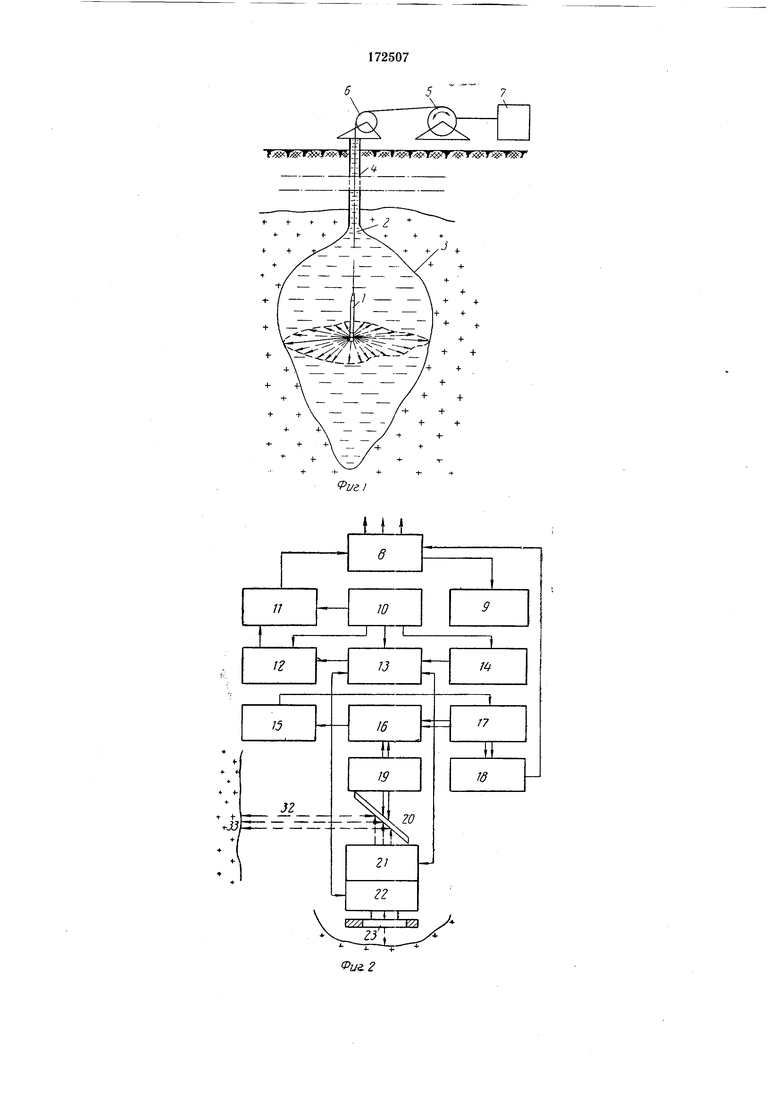
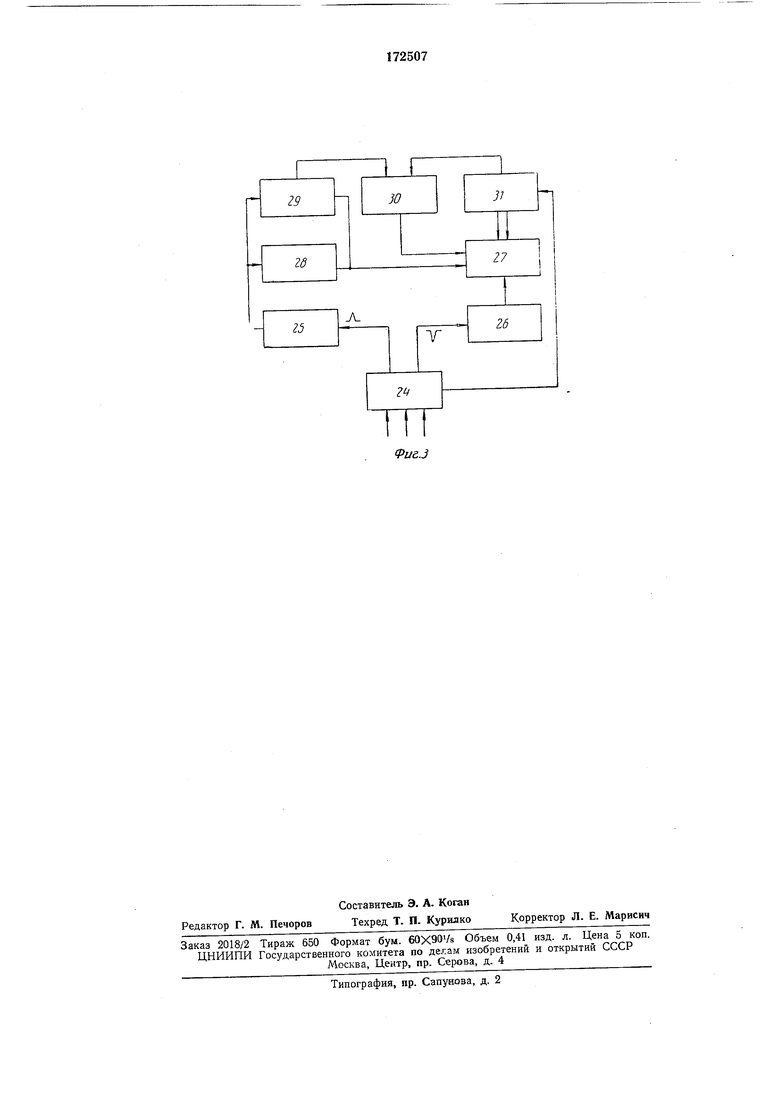
На фиг. 1 изображена общая схема передвижной установки окважинного геолокатора; на фиг. 2 - бл|0к-схема скважинного снаряда геолокатора; на фиг. 3 - блок-схема регистрирующего устройства.
Измерительный (Снаряд 1 геолокатора опускается на трехжильном каротажном кабеле 2 в камеру 3 через колонну обсадных труб 4. Опуско-иодъемные опера-ции осуществляются с иомощью каротажной лебедки 5 через блокбаланс 6. Лебедка расположена на одной автомащине с наземной аппаратурой 7. Уровень погружения снаряда в (Камеру определяется и регистрируется по 1ПОКазанияМ счетчика, работающего (ОТ (Сельсинной системы, приводом которой является колесо блока-баланса 6.
СкважиННый снаряд содержит бл:ок уллотнения 8, блок .питания 9, бло-к управления Ю, блок ПреобразОвания //, усилитель 12 ультразиуковых колебаний, кОМ 1утаЦИ0«ное устройство 13, генератор 14 ультразвуковых колебаний, усилитель 15 сигнала рассогласования, чувствительный элемент 16 системы азимутальной 1Г1р1ИВЯЗ ки, двигатель 17 отработки угла, датчик 18 угла, двигатель 19 обзора, вращающийся отражатель 20, электроакустический преобразователь 21, эле1ктроакустичеCKiHti Преобразователь 22, лолл-Лрозрачиый отражатель 23 калибровочного устройства.
Регистрирующий механиз М включает блок уплотнения 24, усилитель 25 .и,МПульсов излучения, усилитель 26 имлульса приемов, индикатор 27 кругового обзора, блок 28 раз-вертки дальности, блок 29 развертки масштабных кругов, блок 30 отметки ceBCipa и ИОмера масштаба и следящую систему 31 азимутальной привязки.
После подачи титайия через блок уплотнения 8. из блока управления 10 в блок ультразвуковых колебаний 14 поступают |И:МПульсы, определяющие режим работы этого генератора. Одновременно из блока управления 10 в 5лок усилителя 12 ультразвуковых колебаний подаются запирающие имиульсы, а в блок преобразования 11 поступает ситнал, из которого фор.мируется a-i передается через блок уплотнения Б «аземную аппаратуру положительный имиу.тьс, соответствующий молаенту начала посылки зондирующего сигнала. При поступлении .на электроакустический преобразователь 21 с генератора УЗК 14 радиоимпульса ультразвуковой частоты, он излучает В среду, заполияющую камеру, :им1пульс упругих колебаний то же частоты. Этот импульс от отражателя 20 распространяется в камере хранилища узким иучком 32 от измерительного снаряда У по радиус-вектору до стенки 33 камеры, частично отражается последней и возвращается на электр.оакустичеокий преобразователь : 21; при поступлении на электроакустичеакий преобразователь он вырабатывает электрический им1пульс, поступающий через коммутационное устройство 13 на вход усилителя УЗК 12, коэффициент усиления которого после прекращения запирающего импульса постепенно возрастает. Временная автоматическая репул:ировка усиления необходима для исключения .приема ложных отраженпых сигналов, могущих /появиться на электроакустичеокоМ преобразователе от реверберации камеры хранилища при ее обмере.
Усиленные отраженные сигвалы поступают в блок преобразования, где аз «их фор-мируются отрицательные импульсы моментов приема отраженных сигналов, передаваемые через .блок уплотнения 8 в регистрирующую аппаратуру.
- Для изменения направления посылки зондирующих импульсов предназначен двигатель обзора 19, поворачивающий металлический отражатель 20, который равномерно вращает диаграмму направленности электроакустического лреобразователя в горизо.нтальной плоскости. Наличие неподв.ИЖного электроакустического преобразователя и вращающегося отражателя позволяет освободиться от подвижных контактов во входной цепи усилителя УЗК. Для передачи вращения двигателя обзора 19 через стенку снаряда на отражатель 20, работающий под большим Лидростатичеоким давлением, применена цилиндрическая многозубцовая -магнитная муфта (на чертеже «е показана), позволяющая избежать уплотнения осей. Для точного определения скорости раопространения ультразвуковых колебаний в точках регистрации каждо-го сечения предназначено калибровочное устройство, содержащее электроакустический преобразователь 22 и полупрозрачный отражатель 23.
Отражатель 23 размещен на определенно-м расстоя-нии от электроакустичеокого преобразователя 22. Зная это расстояние и замеряя зарегистрированное в регистрирующей аппаратуре время, про-шедшее от мо-мента излучеНИН электроакустическим преобразователем 22 1калибр01ВК1И до момента приема отражающи-м (КОЛЬЦОМ 23 сигнала, вычисляют истинную скорость распространения ультразвуковых колебаний на уров-не горизонтального сечения.
Для перехода с работы в режиме обзора в режим калп бровки оператор наземной аппаратуры .подает команду в окважинный снаряд, |приводящ-ую к срабатыва.нию реле в коммутационном устройстве 13, которое переключает
выход генератора 14 и усилителя 12 с электроакустического преобразователя 21 на электроакустический преобразователь 22 калибров1ки. Работа бло1ков остается той же самой, что и в режиме обзора.
Во время обзора двигатель обзора 19 поворачивает через дифференциал чув-ствительный элемент 16 на тот же угол, что и отражатель 20, т. е. на угол изменения направления локации. Напряжение, появляющееся при этом на
выходе чувствительного элемента 16, усиливается усилителем 15 сигнала рассогласования и Поступает на двигатель 17 отработки угла поворота, который через тот же дифферен.циал поворачивает чувствительный элемент 16 та.к, чтобы сигнал на его выходе стал равным нулю, т. е. вал дви-гателя отработки угла поворачивается на тот лее угол, что и 1вал двигателя обзора, но в проти-воположном направлении. На оси двигателя 17 отработки
-угла закреплен кругов-ой трехфазный .датчик 18 утла поворота диаграммы направленности алектроакустического преобразователя 21.
Трехфазный сигнал датчика 18 угла однозначно -о.пределяет мгновенное положение диаграм-мы направленности электроакустического преобразователя 21 относительно магнитного Меридиана и через блок у;плотнения 8 по каротажному кабелю 2 передается в наземную аппаратуру. В наземной апшаратуре сигналы
ляются и направляются в соответствующие блоки. Трехфазный сигнал, определяющий направление посылки зондирующих .импульсов, лосту пает е следящую систему 31 азимуталь ной привязки. Двигатель следящей системы 31 отрабатывает угол изменения налравленяя посылки зондирующих импульсов, поворачивая на этот угол отклоняющую катущку электронного индикатора 27 кругового обзора. Положительиый импульс момента лосылки зондирующего сигнала, использующийся для синх ронизации работы наземной аппаратуры, после усиления в усилителе 25 поступает в блок 29 развертки масщтабных кругов и зашуокает блок 28 развертки дальности в натравлении, определяемом положением отклоняющей катущки. Отрицательные импульсы моментов приема отраженных сигналов также усили ваются усилителем 26 и поступают на инди.катор 27, где подсвечивают луч трубки во время движения его от блока 28 развертки дальности. Таки.м образом, «аждый принятый отраженный сигнал отмечается на радиус-векторе развертки дальности, причем ра1сстояние отметки от центра определяется временем, прошедщим от излучения зондирующего сигнала до приема его после отражения стенкой камеры хранилища. Положительный импульс мо мента посылки зондирующего сигнала, поступивщий в блок 29 развертки масщтабНых кругов, задерживается последним на время работы блока развертки дальности и после окончания развертки дальности, запускает развертку, на которой подсвечиваются масщтабные метки времени. Метки масщтабных кругов берутся от стабилизированного кварцем генератора. Таким образом, после поворота диаграммы направлетности электроакустического преобразователя 21 на 360°, фоторегистратор наземной аппаратуры зарегистрирует на одном кадре:
замкнутую точечную кривую, соот-ветсгвующую контуру горизонтального сеЧения камеры хранилища на обмеряемом уровне; концентрические точечные кольца - масщтабные круги дальности, -помогающие определить
время между посылкой и приемОМ отраженного сигнала, соответственно выбранному масщтабу; пунктирную линию, наносимую в момент посылки зондирующего имп;ульса в севернОМ направлении. Число щтрихов е линии «север определяет масщтаб, в KOTOpOiM зарегистрировано данное сечение.
Предмет изобрете я
10
1.Скважинный геолокатор для определения конфигурации подземных камер, содержащий наземную регистрирующую аппаратуру, включающую усилители импульсов, -индикатор обзора, блок развертки дальности и записи масщтаба, фоторегистратор и самописец с дисковой диаграм-мой, и скважинный снаряд, опускаемый на каротажном кабеле и включающий блок уплотнения, блок питания, блок
преобразования, блок управления, генератор ультразвуковых колебаний, коммутационное устройство, -усилители, отличающийся тем. что, с целью упрощения устройства, повышения точности измерения и непрерывной привязки измерений к -магнитному меридиану, в скважин ном -снаряде электроакустичеслий преобразователь закреплен непОДвижно относительно -корпуса, а круговой обзор осущесгзлен с помощью наклонного вращающегося
отрал ателя, связан-н-ого через многозубцовук1 магнитную муфту с двигателем обзора, ня оси которого размещен чувствительный элем.ент системы азимутальной привязки, принимающий через дифференциал направлени
вращения отражателя и передающий сигнал рассо-гласования на следящую систе-му.
2.Геолокатор по п. 1, отличающийся тем. что, с целью определения скорости распространения колебаний в окружающей среде и защиты снаря-да от ударов о дно камеры, скважинный снаряд снабжен калибросочны-м устройствОМ, включающим, например, акустически полупрозрачный отражатель, располо-женный на фи:ксированно,м расстоянии иод
снаряда, и систему поворота отражателя в момент калибр-овки.
f cimr yfTi j
( 
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |
| Гидролокатор для исследования подземных хранилищ | 1970 |
|
SU436915A1 |
| СКВАЖИННЫЙ ГИДРОЛОКАТОР | 1971 |
|
SU317782A1 |
| Устройство для подземного акустического исследования | 1975 |
|
SU584269A1 |
| Скважинный гидролокатор | 1990 |
|
SU1796014A3 |
| Скважинный звуколокатор | 1976 |
|
SU693305A1 |
| СКВАЖИННЫЙ ГИДРОЛОКАТОР | 1973 |
|
SU403845A1 |
| Скважинный гидролокатор | 1978 |
|
SU928284A1 |
| Скважинный гидролокатор | 1977 |
|
SU635444A1 |
| Аппаратура для акустического телевидения скважин большого диаметра | 1975 |
|
SU541135A1 |
}г
