Изобретение относится к кинотехнике, в частности к устройствам транспортирования кинопленки киносъемочных аппаратов с кассетной зарядкой.
Известен лентопротяжный механизм для кассеты киносъемочного аппарата, содержащий подающую и приемную бобины, универсальный зубчатый барабан для транспортирования кинопленки и фрикцион, расположенный в приводе приемной бобины.
Недостатком этого механизма является акустический шум, возникающий во время транспортирования кинопленки от ударов зубцов универсального барабана по межперфорационным перемычкам кинопленки.
Наиболее близким техническим решением к изобретению является лентопротяжный механизм киносъемочного аппарата с кассетной зарядкой, содержащий подающую и приемную бобины, тянущий и задерживающий зубчатые барабаны, фильмовый канал с грейферным механизмом, датчики движения кинопленки и датчики размеров петли, связанные с управляющими устройствами, на валу двигателя одного из которых установлена приемная катушка.
Недостатком этого механизма является акустический шум, возникающий в киносъемочном аппарате от ударов зубцов тянущего и задерживающего барабанов по межперфорационным перемычкам кинопленки при ее транспортировании, что может привести к деформации перемычек, и вследствие этого к снижению надежности в
ico
i01 v| Ю iOl
работе лентопротяжного механизма киносъемочного аппарата.
Целью изобретения является уменьшение шума и повышение надежности в работе лентопротяжного механизма киносъемочного аппарата.
Указанная цель достигается тем, что лентопротяжный механизм для киносъемочного аппарата, содержащий подающую и приемную бобины, тянущий и задерживающий барабаны, фильмовый канал с грейферным механизмом а также датчики движения кинопленки и датчики размеров петли, связанные с управляющими устройствами, на валу двигателя одного из которых установлена приемная катушка, снабжен фрикционным механизмом, расположенным внутри задерживающего барабана, а тянущий барабан установлен на валу двигателя другого управляющего устройства, при этом тянущий и задерживающий барабаны выполнены с гладкой упругой поверхностью. Кроме того, датчики движения кинопленки и датчики размеров петли выполнены в виде инфракрасных оптронных пар, при этом датчики движения кинопленки расположены перед тянущим и за задерживающим барабанами соответственно, причем приемник и излучатель каждого датчика движения кинопленки расположены соосно друг с другом, а приемник и излучатель каждого датчика размеров петли расположены под углом друг к другу.
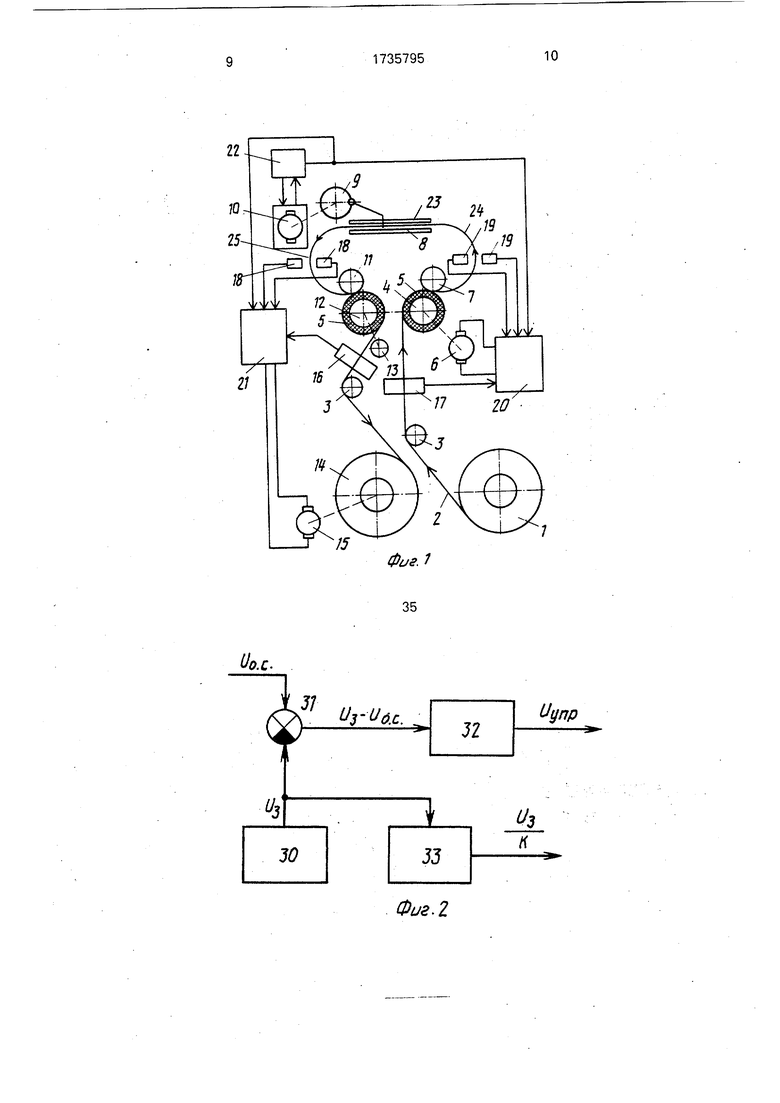
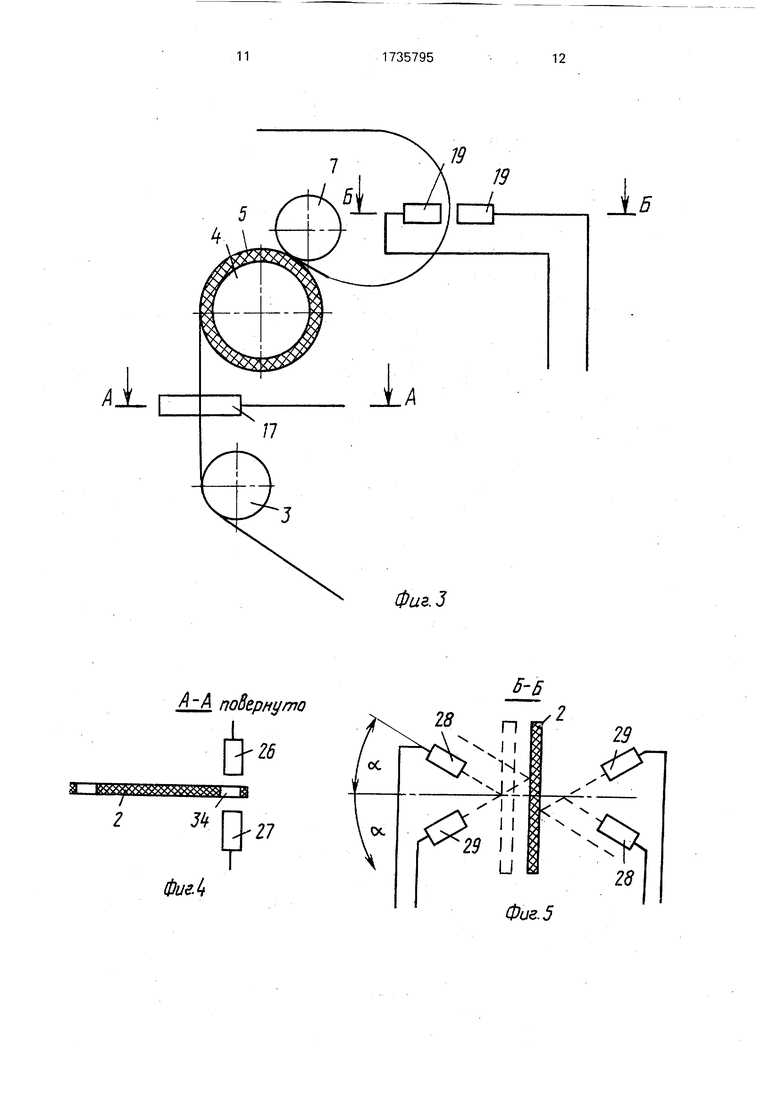
На фиг. 1 показана функциональная схема лентопротяжного механизма киносъемочного аппарата; на фиг. 2 - блок-схема управляющего устройства; на фиг. 3 - часть лентопротяжного механизма киносъемочного аппарата; на фиг 4 - разрез А-А на фиг. 3; на фиг. 5 - разрез Б-Б на фиг. 3; на фиг. 6- блок-схема управляющих устройств.
Лентопротяжный механизм киносъемочного аппарата содержит подающую бобину 1 с кинопленкой 2, обводные ролики 3, тянущий барабан 4 с упругим гладким покрытием 5, установленный на валу двигателя 6, прижимной ролик 7, прижимную планку 8, грейферный механизм 9 с двигателем 10, прижимной ролик 11, задерживающий барабан 12 с упругим гладким покрытием 5 и фрикционом 13, приемную бобину 14, установленную на валу двигателя 15, датчики 16 и 17 движения кинопленки и датчики 18 и 19 размеров петли, выполненные в виде инфракрасных оптронных пар, управляющие устройства 20-22, фильмовый канал 23, петли 24 и 25 кинопленки 2. Излучатель 26 и приемник 27 инфракрасных датчиков 16, 17 расположены соосно друг с другом и размещены перед тянущим
4 и за задерживающим 12 барабанами. Излучатель 28 и приемник 29 каждого датчика 18, 19 размеров петли расположены под углом друг к другу. Датчики 16-19 связаны с
управляющими устройствами 20, 21, а приемная бобина 14 установлена на валу двигателя 15 управляющего устройства 21.
Лентопротяжный механизм работает следующим образом.
0 С подающей бобины 1 кинопленка 2, огибая обводные ролики 3, сматываемые тянущим барабаном 4 с упругим покрытием 5, приводимым во вращение двигателем 6, огибает прижимной ролик 7, образует петлю
5 24, проходит по фильмовому каналу 23, прижимаясь к нему планкой 8, перемещается на величину кадра грейферным механизмом 9, приводимым во вращение двигателем 10. Далее кинопленка 2 образует петлю 25, при0 жимается роликом 11 к задерживающему барабану 12, который снабжен фрикционом 13, огибает обводные ролики 3 и наматывается на приемную бобину 14, приводимую во вращение двигателем 15. При этом дат5 чики 16, 17 движения кинопленки и датчики 18, 19 размера петель 24, 25 кинопленки совместно с управляющими устройствами 22, 21 обеспечивают транспортирование кинопленки 2 в соответствии с заданной час0 тотой кадров и поддерживают оптимальными размеры петель 24, 25. Снабжение задерживающего барабана 12 фрикционом 13 позволяет получить постоянное натяжение кинопленки при намотке на приемную
5 бобину 14, что обеспечивает высокое качество намотки кинопленки 2. Заданная частота кадров обеспечивается управляющим устройством 22, соединенным с двигателем 10, приводящим во вращение грейферный
0 механизм 9.
Управляющее устройство 22 (см. фиг. 2) содержит задающий генератор 30, элемент сравнения 31, усилитель 32 и делитель 33. Управляющее устройство работает сле5 дующим образом. Задающий генератор 30 выдает сигнал задания Уз, пропорциональный требуемой частоте кадров, который поступает на вход элемента сравнения 31 и сравнивается с сигналом обратной связи
0 Uoc, поступающим от датчика частоты (не показан) вращения двигателя 10, приводящего во вращение грейферный механизм 9. На выходе элемента сравнения 31 имеется разностный сигнал U3 Uoc, пропорцио5 нальный отклонению требуемой частоты вращения двигателя 10 от заданной, который усиливается усилителем 32. На выходе усилителя 32 имеется сигнал управления Uynp, который управляет работой двигателя 10. При увеличении или уменьшении частоты вращения двигателя 10 от заданной сигнал Uynp соответственно вызывает уменьшение или увеличение его частоты вращения, обеспечивая тем самым заданную частоту кадров. Сигнал задания Us поступает также в делитель 33, на выходе которого
имеется сигнал , пропорциональный сигналу U3. Сигнал -гг поступает далее в управ- 1ч
ляющие устройства 20 и 21.
Работа инфракрасных датчиков 16, 17 движения кинопленки 2 и датчиков 18, 19 размера петель 24, 25 поясняется фиг. 3-5. Датчики движения 16, 17 одинаковые и представляют собой излучающий инфракрасный диод 26 (см. фиг, 4), фотодиод 27, установленные встречно напротив друг друга. Причем расположены они так, что при движении кинопленки 2 излучение диода 26 попадает в зону перфорационных отверстий 34 на кинопленке 2, периодически пе- рекрываясь межперфорационными перемычками, в результате чего на выходе фотодиода 27 возникает электрический сигнал, пропорциональный скорости движения кинопленки 2. Электрические сигналы от датчика 16 движения кинопленки 2 поступают в управляющие устройство 21, а от датчика 17 - в управляющие устройство 20.
Датчики 18, 19 размера петель 24, 25 представляют собой излучающий инфракрасный диод 28 (см. фиг. 5), фотодиод 29, установленные в плоскости, перпендикулярной поверхности кинопленки 2 и распо- ложенные под некоторым углом а к перпендикуляру к поверхности кинопленки 2, Причем датчики установлены по обе стороны кинопленки симметрично по отношению к ее оптимальному положению, которое определяет необходимый размер петли. При нормальном размере петли излучение диодов 28, не отражаясь от поверхности кинопленки 2, не попадает в фотодиоды 29, сигнал на выходе фотодиодов 29 отсутствует. При увеличении или уменьшении размера петли кинопленка 2 приближается к одной из пар датчиков, излучение диода 28, отражаясь от ее поверхности, попадает в фотодиод 29 и на выходе у последнего возникает электрический сигнал. Электрические сигналы отдатчиков 19 размера петли 24 поступают в управляющее устройство 20, а от датчиков 18 размера петли 25 - в управляющее устройство 21.
Управляющее устройство 20 обеспечивает скорость движения кинопленки 2 на участке: подающая бобина 1 - тянущий барабан 4, в соответствии с заданной частотой
кадров и поддержание оптимального размера петли 24.
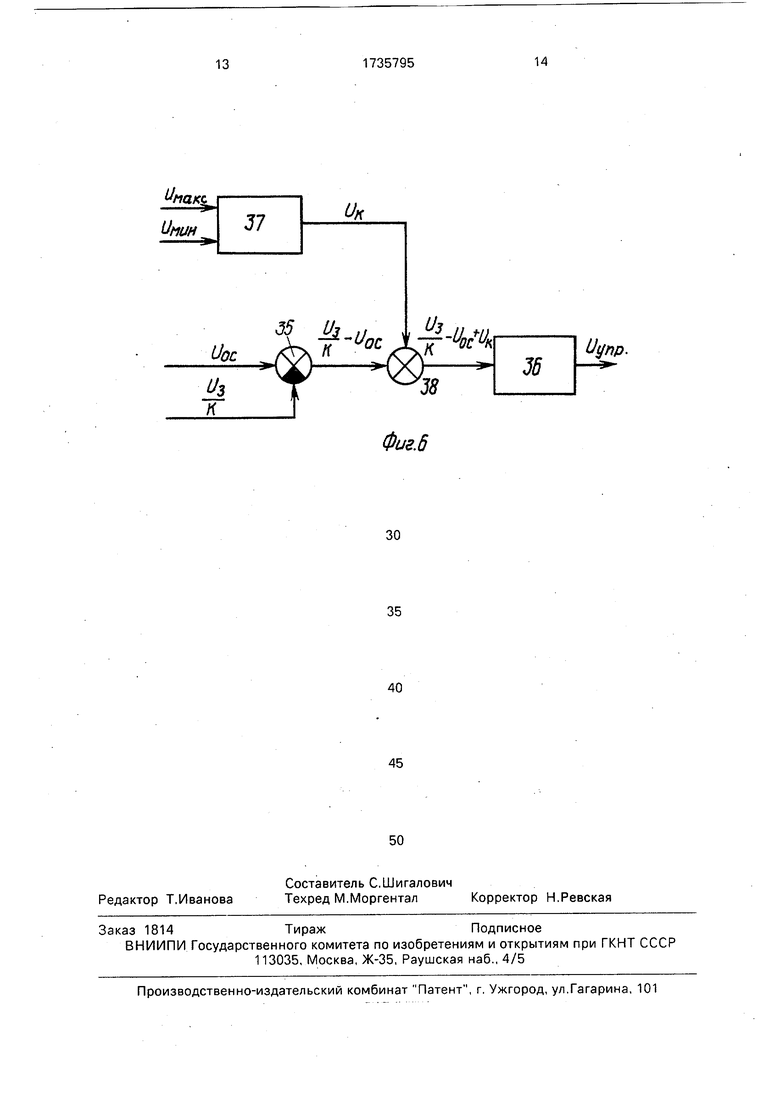
Управляющее устройство 20 содержит элемент сравнения 35, усилитель 36, формирователь 37 и сумматор 38.
Управляющее устройство 20 работает следующим образом. На вход элемента
U3
сравнения 35 подается сигнал задания
К
0
5
0
5
0
5
0
5
0
5
от делителя 33 управляющего устройства 22, пропорциональный заданной частоте кадров, и сигнал обратной связи Ux, пропорциональный скорости движения кинопленки 2 от датчика движения 17 кинопленки, а на выходе элемента сравнения 35 имеется
разностный сигнал -Ј-- Ux, пропорциональ- 1ч
ный отклонению требуемой скорости от заданной, поступающий на вход сумматора 38. На вход формирователя 37 подается сигнал Умакс увеличения размера петли 24 или сигнал имин уменьшения размера петли 24, при оптимальном размере петли 24 сигналы
U макс И Uмин ОТСУТСТВУЮТ.
На выходе формирователя 37 имеется сигнал коррекции UK, поступающий в сумматор 38; при оптимальном размере петли 24 сигнал коррекции UK отсутствует.
Таким образом, при отклонении размера петли 24 от оптимального размера на входе формирователя 37 появляется один из сигналов имакс или UMHH, а на выходе - сигнал коррекции UK, который поступает на вход сумматора 38 и суммируется с разностным сигналом -гг- - Ux, приходящим от элемента сравнения 35. На выходе сумматора
38 будет суммарный сигнал -Ј - Ux + UK,
i
поступающий на вход усилителя 36. На выходе усилителя 36 имеется сигнал управления Uynp, который управляет работой двигателя 6, приводящего во вращение тянущий барабан 4. При увеличении или уменьшении скорости движения кинопленки 2 от заданной, а также при увеличении или уменьшении размера петли 24 от оптимального двигатель 6, приводящий во вращение тянущий барабан 4, соответственно замедляет или ускоряет частоту вращения, тем самым регулируя скорость движения кинопленки 2 и размер петли 24.
Управляющее устройство 21 обеспечивает скорость движения кинопленки 2 на участке: задерживающий барабан 12 - приемная бобина 14 в соответствии с заданной частотой кадров и поддержание оптимального размера петли 25.
Блок-схема управляющего устройства 21 полностью аналогична блок-схеме управляющего устройства 20.
Управляющее устройство 21 работает следующим образом.
На вход элемента сравнения 35 подаются сигналы задания от делителя 33 управляющего устройства 22, пропорциональный заданной частоте кадров, и сигнал обратной связи Ux, пропорциональный скорости движения кинопленки 2 отдатчика движения 16, а на выходе элемента сравнения 35 имеется
разностный сигнал -Ј - Uoc, пропорцио- i
нальный отклонению требуемой скорости от заданной, поступающий на вход сумматора 38. На вход формирователя 37 подается сигнал Умакс увеличения размера петли 25 или сигнал Умин уменьшения размера петли 25. При оптимальном размере петли 25 сигналы имакс и 1)мин отсутствуют. На выходе формирователя 37 имеется сигнал коррекции UK, поступающий в сумматор 38. При оптимальном размере петли 25 сигнал UK отсутствует. Таким образом, при отклонении размера петли 25 от оптимального размера на входе формирователя 37 появляется один из сигналов Умакс или UMHH, а на выходе - сигнал коррекции UK, который поступает на вход сумматора 38 и суммируется с разностным
сигналом -тг- - Ux, приходящим от элемента
сравнения 35.
На выходе сумматора 38 будет суммарU
ный сигнал -п- Ux + UK, поступающий на
IV
вход усилителя 36. На выходе усилителя 36 имеется сигнал Uynp, который управляет работой двигателя 15, приводящего во вращение приемную бобину 14. Вращаясь, бобина 14 наматывает кинопленку 2, преодолевая натяжение, создаваемое фрикционом 13, соединенным с задерживающим барабаном 12. При увеличении или уменьшении скорости движения кинопленки от заданной, а также при уменьшении или увеличении размера петли 25 от оптимального двигатель 15, приводящий во вращение приемную бобину 14, соответственно замедляет или ускоряет частоту вращения, тем самым
регулируя скорость движения кинопленки 2 и размер петли 25.
Выполнение тянущего 4 и задерживающего 12 барабанов гладкими обеспечивает бесшумное транспортирование кинопленки
2, а поддержание оптимального размера петель кинопленки 2 позволяет уменьшить неустойчивость изображения на экспонированной кинопленке.
Ф о р м у л а и з о б р е т е н и я
1,Лентопротяжный механизм для киносъемочного аппарата, содержащий подающую и приемную бобины, тянущий и задерживающий барабаны, фильмовый канал с грейферным механизмом, а также датчики движения кинопленки и датчики размеров петли, связанные с управляющими устройствами, на валу двигателя одного из которого установлена приемная катушка,
отличающийся тем, что, с целью уменьшения шума и повышения надежности, он снабжен фрикционным механизмом, расположенным внутри задерживающего барабана, а тянущий барабан установлен на
валу двигателя другого управляющего устройства, при этом тянущий и задерживающий барабаны выполнены с гладкой упругой поверхностью.
2.Механизм поп.1,отличающий- с я тем, что датчики движения кинопленки и датчики размеров петли выполнены в виде инфракрасных оп- тронных пар, при этом датчики движения кинопленки расположены перед тянущим и
за задерживающим барабанами соответственно, причем приемник и излучатель каждого датчика движения кинопленки расположены соосно друг с другом, а приемник и излучатель каждого датчика размеров петли расположены под углом друг другу.
| название | год | авторы | номер документа |
|---|---|---|---|
| КИНОСЪЕМОЧНАЯ КАМЕРА | 1967 |
|
SU197394A1 |
| ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМБ;-^!;')--! | 1972 |
|
SU344400A1 |
| Кинопроекционный аппарат Никонова | 1983 |
|
SU1206749A1 |
| Киносъемочный аппарат | 1979 |
|
SU857913A1 |
| КИНОСЪЕМОЧНЫЙ АППАРАТ | 1971 |
|
SU293749A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ ПЛЕНКИ В КИНОСЪЕМОЧНЫХ КАМЕРАХ | 1970 |
|
SU275736A1 |
| Способ регулировки лентопротяжного механизма киноаппарата | 1987 |
|
SU1493622A1 |
| ПЕРЕКЛЮЧАЕМАЯ ЛЕНТОПРОТЯЖНАЯ ПРОЕКЦИОННАЯ СИСТЕМА | 1997 |
|
RU2207610C2 |
| КИНОСЪЕМОЧНЫЙ АППАРАТ | 1991 |
|
RU2020530C1 |
| КИНОПРОЕКТОР С АВТОМАТИЧЕСКОЙ ЗАРЯДКОЙ ФИЛЬМА | 1973 |
|
SU368576A1 |
Изобретение относится к кинотехнике и позволяет уменьшить шум и повысить надежность лентопротяжного механизма для киносъемочного аппарата. Лентопротяжный механизм снабжен фрикционным механизмом 13, расположенным внутри задерживающего барабана 12, а тянущий барабан 4 установлен на валу двигателя 6 управляющего устройства 20, причем тянущий 4 и задерживающий 12 барабаны выполнены с гладкой упругой поверхностью 5. Датчики 16, 17 движения кинопленки и датчики 18, 19 размеров петли, выполнены в виде инфракрасных оптронных пар. Датчики 16, 17 движения кинопленки расположены перед тянущим 4 и за задерживающим 12 барабанами соответственно. Приемник и излучатель каждого датчика 16, 17 движения кинопленки расположены соосно друг с другом, а приемник и излучатель каждого датчика 18, 19 размеров петли расположены под углом друг к другу. 1 з п. ф-лы, 6 ил. сл
US-VAC.
П
Uynp
Фиг.2
7 ч,
-I Л ;
i-rcfio
L
А
L
А-А по&ернуто 26
& BQQQQQ999S55uu66uSK8. И /
2М
27
Фиг.
1
rcfio
L
Фиг.З
29
Фиг.6
| УЛУЧШЕННОЕ ЭЛЕКТРЕТНОЕ АВТОМАТИЧЕСКОЕ ОТКЛЮЧЕНИЕ КАПЕЛЬНОЙ КАМЕРЫ ДЛЯ ВНУТРЕННЕЙ ИНФУЗИИ | 2005 |
|
RU2396986C2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
