fe
| название | год | авторы | номер документа |
|---|---|---|---|
| Генератор случайных чисел | 1990 |
|
SU1774333A1 |
| Генератор случайных чисел | 1989 |
|
SU1686440A1 |
| Генератор случайных чисел | 1989 |
|
SU1688240A1 |
| Генератор функций принадлежности | 1990 |
|
SU1751743A1 |
| Генератор случайных чисел | 1990 |
|
SU1774332A1 |
| Генератор случайных чисел | 1989 |
|
SU1746381A1 |
| Генератор случайных чисел | 1989 |
|
SU1721607A1 |
| Генератор случайных чисел | 1988 |
|
SU1605230A1 |
| Генератор нечетких чисел | 1991 |
|
SU1833869A1 |
| Генератор случайных чисел | 1989 |
|
SU1688245A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах регулирования. Цель изобретения - повышение точности регулятора. Сущность изобретения: дискретный регулятор содержит генератор 1 тактовых импульсов, формирователь нечеткой оценки выхода объекта регулирования 2, блок вычитания 3, 2 блока сравнения 4, 13, формирователь управляющего значения 5, входной регистр 6, объект регулирования 7, 1 выходной регистр 8,3 элемента задержки 9,14,15, датчик случайных чисел 10, формирователь допустимых границ состояния объекта регулирования 11, формирователь нечеткого значения требуемого регулирующего воздействия 12. 1-12-3-4-5-6-7-8-2-3, 1-9- 10-11-13-5, 1-14-15-6; 14-8, 11-4, 3-13, 1-2. Зил.
И
&
о
СО
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах регулирования.
Цель изобретения - повышение точности регулятора.
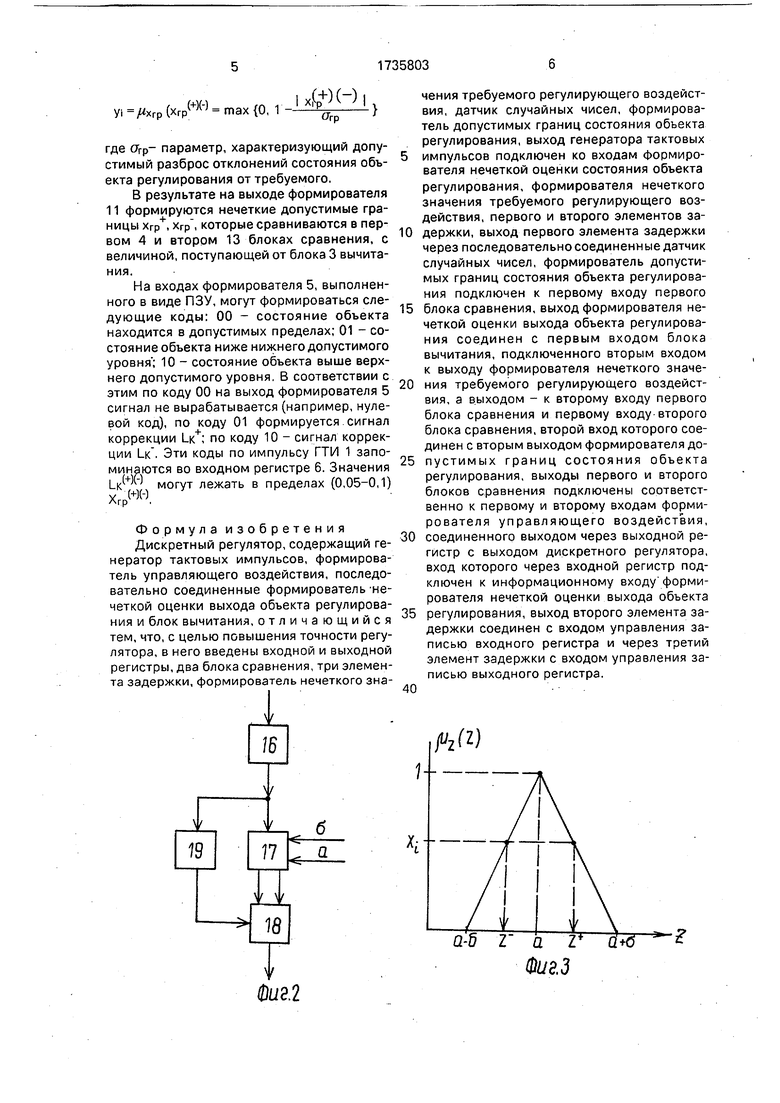
На фиг. 1 представлена электрическая структурная схема дискретного регулятора; на фиг. 2 - то же, формирователей; на фиг. 3 -диаграмма, поясняющая их работу.
Дискретный регулятор (фиг. 1) содержит генератор 1 тактовых импульсов (ГТК), формирователь 2 нечеткой оценки выходного объекта регулирования, блок 3 вычитания, первый блок 4 сравнения, формирователь 5 управляющего значения, входной регистр 6, объект 7 регулирования, выходной регистр 8, первый элемент 9 задержки, датчик 10 случайных чисел (ДСЧ), формирователь 11 допустимых границ состояния объекта регулирования, формирователь 12 нечеткого значения требуемого регулирующего воздействия, второй блок 13 сравнения, второй1 14 и третий 15 элементы задержки.
Формирователи 2 и 12 (фиг. 2) содержат датчик 16 случайных чисел, формирователь 17 границ значений носителя, формирователь 18 значений носителя, элемент 19 задержки.
Устройство работает следующим образом.
По импульсу ГТК 1 в выходной регистр 8 записывается текущее значение аизм выходного сигнала объекта 7 регулирования (значение процесса). При аналоговом входном и выходном сигналах объекта можно использовать соответственно ЦАП и АЦП. Кроме того, по импульсам ГТИ 1 производится обновление выходного сигнала датчика 16, входящего в состав формирователя 2. На выходе датчика 10 по i-му импульсу ГТИ 1 вырабатывается возможное значение п случайной величины, имеющей равномерное распределение в интервале (0,1). Значе- ние п является случайным значением уровня функции принадлежности (фиг.3), по которой в формирователе 17 формирователя 2. Вычисляются граничные значения носителя функции принадлежности хизм+, хизм (фиг.З). Функция принадлежности задается в виде функции принадлежности примерного равенства
,г- ЭизМ Хизм I т /„,
,«хИЗм(хизм) max {0, 1Q-} (1)
где аизм, Оизм - параметры функции принадлежности.
Тогда параметры хизм и хизм определяются из уравнения
П (ХИЗМ№))- {Хизм+, (2)
При этом в качестве аизм принимается сигнал выходного регистра 8, а в качестве Оизм (характеризующей разброс измерений вследствие нечеткого определения состояния объекта) принимается сигнал от задат- чика (не показан).
В формирователе 17, выполненном в ви- де ПЗУ, значения хизм+, хизм определяются путем прямых вычислений по формуле (2), которой достаточно для его программирования. Эти значения подаются в формирователь 18, в котором формируется нечеткое значение результатов оценки состояния объекта регулирования хИзм. Формирователь 17 программируется на основе следующего соотношения
Хизм П-1 (Хизм - Хизм J Хизм ,
где гр 1 -сигнал датчика 16, который подается на вход формирователя 18с задержкой на один такт ГТИ в элементе 19 задержки.
в формирователе 12 аналогично вырабатывается нечеткое значение хтр, которое выражает желательное значение выходного сигнала объекта регулирования.
Для вычислений хТр+, хтр в формирователе 17 формирователя 12 используется функция принадлежности
/(хтр) max {0,1-атр Хтр Щ
-}
где атр, - параметры, характеризующие наиболее желательное состояние объекта и его возможный разброд которые подаются от задатчиков (не показаны). 40В формирователе 18 формирователя 12
окончательно формируется значение
Хтр П-1 (Хтр+- Хтр) + Хтр.
45
В блоке определяется разность
X - Хизм Хтр,
характеризующая отклонение состояния объекта регулирования от желательного состояния.
При этом задержки импульса опроса в первом элементе 9 задержки датчик 10 вырабатывает очередное возможное значение случайной величины у, с равномерным распределением в интервале (0,1). В формирователе 11, который выполнен в виде ПЗУ, и программируется по результатам решения уравнения
У| (xrp max {0, 1 -а.
Ф
где Огр- параметр, характеризующий допустимый разброс отклонений состояния объекта регулирования от требуемого.
В результате на выходе формирователя 11 формируются нечеткие допустимые границы хгр+, хгр, которые сравниваются в первом 4 и втором 13 блоках сравнения, с величиной, поступающей от блока 3 вычитания.
На входах формирователя 5, выполненного в виде ПЗУ, могут формироваться следующие коды: 00 - состояние объекта находится в допустимых пределах; 01 - состояние объекта ниже нижнего допустимого уровня ; 10 - состояние объекта выше верхнего допустимого уровня, В соответствии с этим по коду 00 на выход формирователя 5 сигнал не вырабатывается (например, нулевой код), по коду 01 формируется сигнал коррекции LK+; по коду 10 - сигнал коррекции . Эти коды по импульсу ГТИ 1 запоминаются во входном регистре 6. Значения LK™ могут лежать в пределах (0,05-0,1) XrPWH.
Формула изобретения Дискретный регулятор, содержащий генератор тактовых импульсов, формирователь управляющего воздействия, последовательно соединенные формирователь нечеткой оценки выхода объекта регулирования и блок вычитания, отличающийся тем, что, с целью повышения точности регулятора, в него введены входной и выходной регистры, два блока сравнения, три элемента задержки, формирователь нечеткого ) (-) |чения требуемого регулирующего воздейст--гвия, датчик случайных чисел, формирователь допустимых границ состояния объекта регулирования, выход генератора тактовых
5 импульсов подключен ко входам Формирователя нечеткой оценки состояния объекта регулирования, формирователя нечеткого значения требуемого регулирующего воздействия, первого и второго элементов за10 держки, выход первого элемента задержки через последовательно соединенные датчик случайных чисел, формирователь допустимых границ состояния объекта регулирования подключен к первому входу первого
15 блока сравнения, выход формирователя нечеткой оценки выхода объекта регулирования соединен с первым входом блока вычитания, подключенного вторым входом к выходу формирователя нечеткого значе20 ния требуемого регулирующего воздействия, а выходом - к второму входу первого блока сравнения и первому входу второго блока сравнения, второй вход которого соединен с вторым выходом формирователя до25 пустимых границ состояния объекта регулирования, выходы первого и второго блоков сравнения подключены соответственно к первому и второму входам формирователя управляющего воздействия,
30 соединенного выходом через выходной регистр с выходом дискретного регулятора, вход которого через входной регистр подключен к информационному входу формирователя нечеткой оценки выхода объекта
35 регулирования, выход второго элемента задержки соединен с входом управления записью входного регистра и через третий элемент задержки с входом управления записью выходного регистра.
40
| Чуев Ю.В | |||
| Прогнозирование количественных характеристик процессов | |||
| - М,: Советское радио, 1975, с 122 |
