Изобретение относится к оптическому приборостроению, в частности к измерению угла вращения плоскости поляризации поляриметрическим методом, к измерению степени поляризации оптического излучения.
Известен способ определения угла вращения плоскости поляризации света оптически активным веществом посредством фотоэлектрического поляриметра, в котором плоскость поляризации света во время измерений непрерывно приводят во вращение или колебание с переходом через максимум и минимум света Причем вращение или колебание плоскости поляризации света производят путем вращения или колебания одного из поляризующих элементов.
Вращение или колебание плоскости поляризации может быть осуществлено также при про ождении поляризованного света через ячейку Керра или модулятор Фарадея
Недостатком изложенного способа является сравнительно невысокая точность измерения угла ( 1 ) из-за недостаточной фильтрации полезного сигнала.
Наиболее близким по технической сущности и достигаемому результату к изобретениюявляетсяобъективныйполяризационный способ измерения угла вращения плоскости колебаний поляризованного излучения, заключающийся в периодической модуляции направления колебаний излучения, его поляризационной фильтрации, преобразовании интенсивно
-N -N Јь
Он
N)
сти излучения в электрический сигнал и определении угла вращения плоскости колебаний по электрическому сигналу на частоте модуляции излучения. При реализации способа свет от коллимированного источника пропускают через поляризатор и модулятор в виде ячейки Фарадея, подвергающий колебательному движению плоскость поляризации (колебаний) излучения с частотой ш колебаний тока в модуляторе. Затем пропускают его через анализатор, скрещенный с поляризатором, после чего свет становится модулированным по интенсивности с частотой 2 UA Модулированный свет направляют на фотоприемник, преобразуют в электрический сигнал, фильтруют на частоте со, синхронно эжектируют и по нему определяют угол вращения плоскости колебаний.
Недостатком данного способа измерения угла вращения плоскости колебаний является недостаточная чувствительность и точность по следующим причинам: величину потока на приемнике, модулированного по интенсивности, можно представить выражением:
Фпр(1) Ф0 52 + -у ±2adsincut--|-cos2a« + 01, (1}
где Фо - поток, прошедший поляризатор;
а - амплитуда колебаний плоскости поляризации, вызываемых модулятором;
со 2я FM - угловая частота переменного тока модулятора;
DJ.- коэффициент пропускания излучения скрещенных поляризатора и анализатора;
б - угол вращения плоскости колебаний.
Из выражения (1) следует:
между углом 5 и амплитудой 1-й гармоники сигнала частоты а) существует линейная зависимость в диапазоне угла д 3°; амплитуда второй гармоники частоты 2ш имеет максимум для угла б О и практически не меняется в указанном диапазоне угла д.
Поток на приемнике минимален, когда угол 6 0 и амплитуда колебаний плоскости поляризации а 0, что соответствует моментам времени, когда ток в модуляторе отсутствует. При этом минимальный поток на приемнике обусловлен остаточным коэффициентом пропускания DJ.B выражении (1).
Из чего следует, что составляющие сигнала на частоте 2 О) и обусловленный оста- точным пропусканием скрещенных поляризатора и анализатора являются помехами, ограничивающими чувствительность метода и точность измерений угла д.
Целью изобретения является повышение чувствительности и точности измерений.
Это достигается тем, что в предложенном способе начало преобразования интенсивности в электрический сигнал синхронизируют с моментом равенства нулю амплитуды модуляции направления коле- банийизлучения,формируют
дополнительный электрический сигнал путем задержки основного электрического сигнала на время, равное полупериоду модуляции направления колебаний излучения, и вычитают из основного электрического сигнала дополнительный электрический
сигнал.
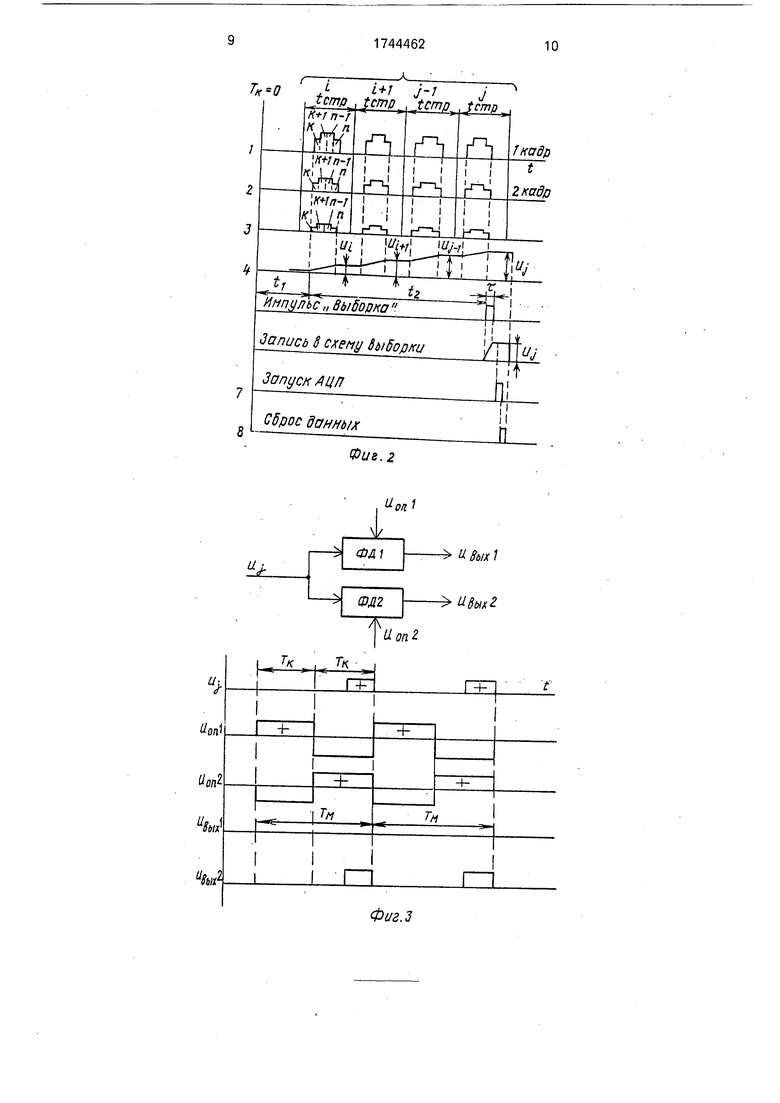
На фиг.1 изображена структурная схема устройства, реализующего предложенный способ; на фиг,2 - временная диаграмма, поясняющая взаимодействие блоков, обеспечивающих учет пространственного распределения зарядов; на фиг.З - схема и временная диаграмма, поясняющие принцип определения знака проинтегрированного сигнала МКВ.
Устройство содержит коллимированный источник 1, поляризатор 2, активное вещество 3, модулятор 4, анализатор 5, объектив 6, матрицу ФЗПС 7 с универсальным средним регистром, видеоусилители 8, 9, дифференциальный усилитель 10, интегратор 11, схему 12 выборки-хранения, аналого-цифровой преобразователь 13, генератор 14 опорного напряжения, генератор 15 управляющих импульсов, блок 16 управления, фазовый детектор 17.
Излучение от источника 1 пропускают
через поляризатор 2, оптически активное вещество 3, вызывающее вращение плоскости колебаний излучения на угол д, и далее через модулятор 4, анализатор 5 и объектив
6 направляют на фотоприемник 7 в виде излучения, модулированного по интенсивности в соответствии с (1), см. эпюру Е на фиг, 16.
В качестве приемника применяют матрицу ФПЗС с универсальным средним регистром в режиме межкадрового вычитания (МКВ). В твердотельном телевидении (4) при так .тм режиме работы подавляется стационарная часть сигнала, что позволяет существенно повысить чувствительность. Возвращаясь к выражению (1), очевидно, к стационарной части сигнала на выходе ФПЗС можно отнести составляющие частоты 2 a)v D(.
Полезным сигналом, изменяющимся по
амплитуде от кадра (полупериода модуляции) к кадру, является составляющая сигнала на частоте са. Для осуществления режима МКВ задерживают основной сигнал на время, равное длительности кадра Т Тм/2 (фиг. 16), и вычитают из него дополнительный сигнал последующего кадра (полупериода). Межкадровую разность напряжения сигнала определяют из выражения:
AUc(t) Uc(t+TK)-Uc(t),(2)
где Uc(t+TK)- напряжение сигнала на выходе ФПЗС, задержанное на время Тк.
Uc(t) - напряжение сигнала в текущем кадре.
Для получения сигнала A Uc(t) синхронизируют частоту модуляции FM излучения кадровой частотой FK вывода информации из ФПЗС, выбрав FM 0,5FK. При этом обеспечивается синхронизация начала преобра- зования интенсивности излучения в электрический сигнал с моментами равенств нулю амплитуды колебаний плоскости поляризации (моменты равенства нулю тока в модуляторе).
Происходящие процессы в режиме МКВ можно записать в следующем виде:
Фпр, (t) Ф0, (# +|- ± 2а 6 sin йл -1- cos 2 ах) + Di -,
-поток в i-том элементе ФПЗС в 1-м кадре,
ФЈР, (t) Ф0, ((52 +1- ± 2з 6 sin ел - cos 2 ал) + Di -.
-поток на том же элементе матрицы во 2-м кадре.
При известной интегральной чувствительности Sv, коэффициенте передачи Кп матрицы и соотношении между напряжением с i-ro элемента и освещенностью на нем можно определить напряжение:
Тк
Uci(t) Кр Sv J EI t dt и затем перейти к
уравнениям для напряжений сигналов на выходах регистров матрицы:
IsinftK - -cos2 ut
:)+DJ.
для 1-го кадра:
,(t) U,(
для 2-го кадра:
Ui,(0 U{(#+Ј±2a n«-.Јcoe2«)+Di|.
После межкадрового вычитания сигналов имеем напряжение:
AUCi(t) 2Uoi-2a д sin У t, свободное от стационарной части сигнала на этом элементе, являющейся помехой. Причем составляющая частоты 1(О намного порядков превышает полезный сигнал для угла д 3°.
Операцию вычитания нафиг.1 выполняет блок 10, синхронизацию работы - блок 15, а происходящие процессы отражают эпюры на фиг.1б.
Преобразование излучения в электрический сигнал осуществляется ФПЗС-7. Один цикл его работы в режиме МКВ состоит из двух кадров. В первом кадре выполняется накопление заряда в секции накопления СН и перенос его через средний
регистр СР в секцию хранения СХ. Во втором кадре выполняется накопление заряда в СН и параллельное хранение предыдущего кадра в СХ, а также параллельное считывание из СН заряда второго кадра через СР
и первого кадра через выходной регистр В Р. Перечисленные операции происходят внутри матрицы под действием управляющих импульсов генератора 15. Считанные сигналы Ucp и Usp после усиления в видеоусилителях 8 и 9 подаются на дифференциальный усилитель 10, на входе которого выделяется напряжение A U (см. фиг. 16), где Е - освещенность в плоскости элементов ФПЗС, принадлежащих i-j строкам и к-п
столбцам, образующим окно выборки (фрагмент В); Тм - период колебаний модуляции; СИ - синхроимпульсы от генератора 15 с периодом Т Тм/2; СР, ВР - сигналы на выходе среднего и выходного регистров
соответственно; ДУ - сигнал МКВ на выходе усилителя 10.
Для учета пространственного распределения зарядов под засвеченными элементами матрицы в окне выборки сигнал AU
интегрируют в интеграторе 11, записывают в схему 12, управляемую блоком 16, затем считывают в АЦП 13, где его кодируют. Параллельно с этим определяют знак сигнала AU в детекторе 17 с целью определения
направления вращения плоскости поляризации.
На фиг.2 цифрами 1-8 обозначены процессы, протекающие в соответствующих точках блок-схемы на фиг.1. Временной интервал ti соответствует интервалу от начала накопления до момента, когда сигнал первого засвеченного элемента превысит пороговый уровень. С него начинается процесс поэлементного и построчного интегрирования до уровня Uj, который заканчивается в момент t2 при поступлении импульса Выборка. Этими процессами управляет блок 16.
Схема (фиг.З) содержит два параллельно включенных фазовых детектора, за- питываемых по управляющим входам противофазными опорными напряжениями генератора 14. Номер детектора, на выходе
Тн к Тн Тн
СИ
Тк пГкп ij
И-Ь
ts
FTl
tt
t±
Фиъ.1
4
i
Ucp(t+TK)
7JFbs
щ
а „ Oft но &ы5орки
к л
F-pfel
i i уд
В
г-глф
MWHDQ ootigs
ufiyxofiuo nxtiogiqg йызхо 8 чопио
,0XffOffUff 



| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ВРАЩЕНИЯ ПЛОСКОСТИ ПОЛЯРИЗАЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И ФОТОЭЛЕКТРИЧЕСКИЙ ПОЛЯРИМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2088896C1 |
| Устройство для измерения величины двулучепреломления | 1983 |
|
SU1099256A1 |
| Автоматический поляриметр | 1982 |
|
SU1060954A1 |
| ПОЛЯРИМЕТР | 1992 |
|
RU2112937C1 |
| МАГНИТОСПЕКТРОПОЛЯРИМЕТР | 1973 |
|
SU376701A1 |
| СПОСОБ НАБЛЮДЕНИЯ СТЕРЕОИЗОБРАЖЕНИЙ С ОБЪЕДИНЕННЫМ ПРЕДЪЯВЛЕНИЕМ РАКУРСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2306680C1 |
| Магнитооптический гистериограф | 1980 |
|
SU928275A1 |
| ПОЛЯРИМЕТРФОНД ^*!епЕРШ j | 1973 |
|
SU385206A1 |
| Анализатор спектра электрических сигналов | 1988 |
|
SU1765775A1 |
| СПОСОБ МОДУЛЯЦИИ СВЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2031423C1 |
Изобретение относится к оптическому приборостроению Цель изобретения - повышение чувствительности иточности измерений Способ заключается в периодической модуляции направления колебаний излучения, поляризационной фильтрации излучения и преобразовании интенсивности излучения в основной и задержанный дополнительный электрические сигналы. Использование задержки электрического сигнала позволяет повысить линейность преобразования измеряемого угла в выходной сигнал 3 ил
| Приборостроение, 1959, № 11, с 10 | |||
| ОМП, 1968, № 10, с.9 | |||
| Авторское свидетельство СССР № | |||
| Способ определения угла вращения плоскости поляризации света оптически активными веществами | 1941 |
|
SU65654A1 |
