Изобретение относится к сельскохозяйственному машиностроению, а именно к комбинированным орудиям для безотвальной обработки почвы.
Известны комбинированное орудие для безотвальной обработки почвы, содержащее раму с опорными колесами, широкозахватные плоскорежущие лапы, активные рыхлители, установленные впереди плоскорежущих лап. Известное орудие обеспечивает обработку почвы путем подъема и крошения почвенного пласта. Применение активных рыхлителей, установленных впереди плоскорежущих лап, способствует увеличению степени крошения почвы, вследствие этого повышаются агрофизические характеристики поверхностного слоя.
Однако известное комбинированное орудие имеет существенный недостаток. Активные рыхлители нарушают связь корневой системы растительных остатков с почвой. При этом основная масса растительных остатков заделывается активными рыхлителями в почву и только небольшая ее часть остается на поверхности почвы. В данном случае увеличивается вероятность возникновения ветровой эрозии.
Наиболее близким к предлагаемому решению по технической сущности и достигаемому эффекту является комбинированное орудие для безотвальной обработки почвы, содержащее раму, опорные колеса, широкозахватные плоскорежущие лапы, впереди которых установлены рыхлители с приводом от вала отбора мощности (ВОМ) трактора, д атчик глубины хода рыхлителей, шарнирно закрепленный на раме и связанный кинематически с активной вилкой вариатора механизма привода рыхлителей.
Данная конструкция комбинированного агрегата позволяет увеличить массу растительных остатков на поверхности почвы путем автоматического регулирования в процессе движения агрегата кинематического режима работы активных рыхлителей в зависимости от неравномерности глубины рыхления подлине гона.
Как известно, кинематический режим работы активных рыхлителей характеризуют с помощью кинематического показателя А который определяют по следующей формуле
со
с
VI ел о
VI
д л:п(Р-2а)
V,
m
где D - диаметр игольчатого диска рыхлителя, м;
а - глубина обработки почвы, м;
VM - поступательная скорость движения орудия, м/с;
п - угловая скорость вращения диска,
я-3,14.
Для обеспечения высокого качества рабочего процесса активных рыхлителей при заданной поступательной скорости движения агрегата необходимо выбрать такое значение угловой скорости вращения диска, при котором кинематический показатель 1 должен быть равным единице, Анализ приведенных конструкций комбинированных орудий показывает, что задача по обеспечению равенства А 1 в реальных условиях не может быть точно решена вследствие того, что движители трактора в процессе работы пробуксовывают и тем самым имеет место неравномерность поступательной скорости орудия. Неравномерность поступательной скорости движения почвообрабатывающего орудия приводит к нарушению условия качественной работы активных рыхлителей и снижению эффективности управления режимом их работы (с помощью технического решения в виде датчика глубины обработки почвы, кинематически связанного с активной вилкой вариатора механизма привода).
Цель изобретения заключается в повышении качества противоэрозионной обработки почвы путем автоматического регулирования в процессе движения угловой скорости дисков-рыхлителей в зависимости от неравномерности поступательной скорости движения почвообрабатывающего орудия.
Указанная цель достигается тем, что в известном устройстве, содержащем раму, опорные колеса, широкозахватные плоскорежущие лапы, активные рыхлители, датчик глубины обработки почвы, вариатор с активной вилкой, выходной вал вариатора с подпружиненным рабочим колесом установлен в подвижных опорах с возможностью перемещения в направлении, перпендикулярном его продольной оси симметрии, причем возможное перемещение осуществляется пропорционально сигналу исполнительного механизма, который через преобразователь связан с датчиком поступательной скорости. При этом угловую скорость вращения дисков-рыхлителей регулируют в зависимости от неравномерности глубины обработки почвы (для этого используется известное техническое решение датчик скорости - активная вилка вариатора - промежуточное
колесо вариатора) и неравномерности поступательной скорости движения орудия. Новое техническое решение расширяет диапазон изменения передаточного отношения вариатора механизма привода дисков в
зависимости от основных кинематических факторов, определяющих качественную их работу.
Сопоставительный анализ нового решения с прототипом показывает, что заявляемое комбинированное орудие отличается устройством вариатора механизма привода дисков. В известном решении рабочее колесо на выходном вале установлено подвижно С возможностью перемещения в осевом направлении под воздействием промежуточного колеса (кинематически связанного с активной вилкой и датчиком глубины обработки) и компенсационной пружины. В данном техническом решении рабочее колесо
на выходном вале совершает перемещение в двух взаимно перпендикулярных плоскостях, что позволяет сделать вывод о его соответствии критерию новизна.
Сравнение заявляемого решения не
только с прототипом, но и с другими техническими решениями в области комбинированных орудий для обработки почвы, механизмов привода их дисковых рабочих органов, устройств для бесступенчатого регулирования угловой скорости выходных валов вариаторов не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что дает возможность сделать вывод о соответствии критерию существенные отличия.
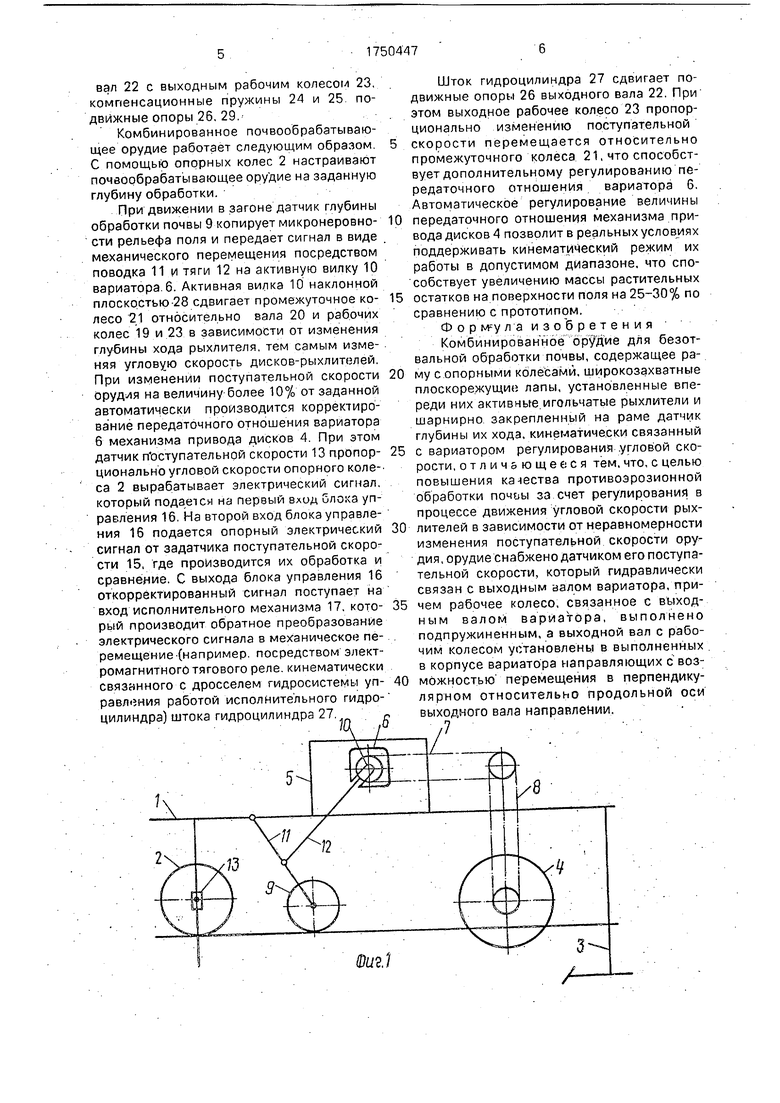
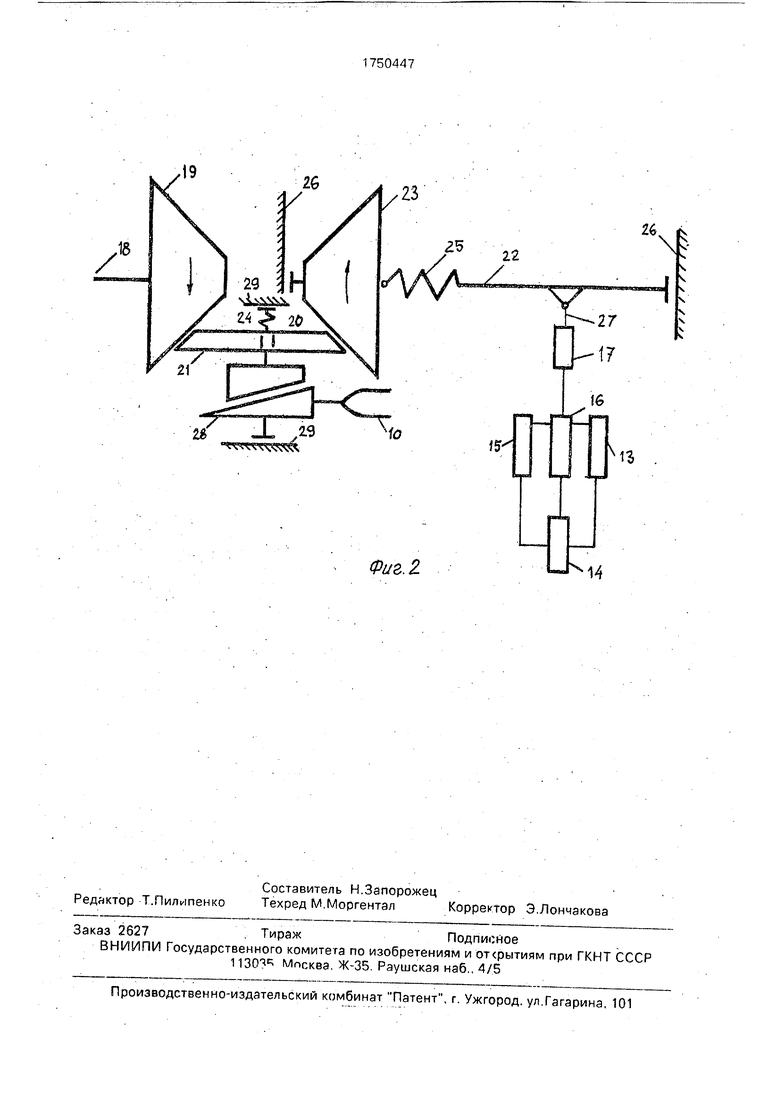
На фиг.1 изображена схема комбинированного орудия для обработки почвы; на фиг,2 - вариатор механизма привода дисков рыхлителя.
Комбинированное орудие для безотвальной обработки почвы содержит раму 1, опорные колеса 2, широкозахватные плоскорежущие лапы 3, игольчатые диски 4 с механизмом их привода в виде редуктора 5,
вариатора 6, цепной передачи 7, клиноре- менной передачи 8, датчик глубины обработки почвы 9, активную вилку 10, поводок 11. тягу 12, датчик поступательной скорости орудия 13, блок питания 14, задатчик постунательной скорости 15, блок управления 16. исполнительный механизм в виде гидроцилиндра 17. Вариатор 6 включает входной вал 18 с ведущим рабочим колесом 19, промежуточный вал 20 с колесом 21 и выходной
вал 22 с выходным рабочим колесом 23, компенсационные пружины 24 и 25 подвижные опоры 26, 29
Комбинированное почвообрабатывающее орудие работает следующим образом С помощью опорных колес 2 настраивают почвообрабатывающее орудие на заданную глубину обработки.
При движении в загоне датчик глубины обработки почвы 9 копирует микронеровности рельефа поля и передает сигнал в виде механического перемещения посредством поводка 11 и тяги 12 на активную вилку 10 вариатора 6. Активная вилка 10 наклонной плоскостью 28 сдвигает промежуточное ко- лесо 21 относительно вала 20 и рабочих колес 19 и 23 в зависимости от изменения глубины хода рыхлителя, тем самым изменяя угловую скорость дисков-рыхлителей При изменении поступательной скорости орудия на величину более 10% от заданной автоматически производится корректирование передаточного отношения вариатора 6 механизма привода дисков 4 При этом датчик поступательной скорости 13 пропор- ционально угловой скорости опорного колеса 2 вырабатывает электрический сигнал, который подает си на первый вход блока управления 16 На второй вход блока управления 16 подается опорный электрический сигнал от задатчика поступательной скорости 15, где производится их обработка и сравнение. С выхода блока управления 16 откорректированный сигнал поступает на вход исполнительного механизма 17, который производит обратное преобразование электрического сигнала в механическое перемещение (например посредством электромагнитного тягового реле кинематически связанного с дросселем гидросистемы уп
равления работой исполнительного гидроцилиндра) штока гидроцилиндра 27«
Ч г
0
0
5 5
0
5
0
Шток гидроцилиндра 27 сдвигает подвижные опоры 26 выходного вала 22 При этом выходное рабочее колесо 23 пропорционально изменению поступательной скорости перемещается относительно промежуточного колеса 21, что способствует дополнительному регулированию передаточного отношения вариатора 6, Автоматическое регулирование величины передаточного отношения механизма привода дисков 4 позволите реальных условиях поддерживать кинематический режим их работы в допустимом диапазоне, что способствует увеличению массы растительных остатков на поверхности поля на 25-30% по сравнению с прототипом.
Фор ла изобретения Комбинированное орудие для безотвальной обработки почвы, содержащее раму с опорными колесами, широкозахватные плоскорежущие лапы, установленные впереди них активные игольчатые рыхлители и шарнирно закрепленный на раме датчик глубины их хода, кинематически связанный с вариатором регулирования угловой скорости, отличающееся тем, что, с целью повышения канества противоэрозионной обработки почьы за счет регулирования в процессе движения угловой скорости рыхлителей в зависимости от неравномерности изменения поступательной скорости орудия, орудие снабжено датчиком его поступательной скорости, который гидравлически связан с выходным валом вариатора, причем рабочее колесо, связанное с выходным валом вариатора, выполнено подпружиненным, а выходной вал с рабочим колесом установлены в выполненных в корпусе вариатора направляющих с возможностью перемещения в перпендикулярном относительно продольной оси выходного вала направлении. 7
&
Iff
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированное орудие для безотвальной обработки почвы | 1981 |
|
SU967306A1 |
| Комбинированное орудие для безотвальной обработки почвы | 1984 |
|
SU1268122A1 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2239297C1 |
| КОМБИНИРОВАННОЕ ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 2002 |
|
RU2215388C1 |
| АГРЕГАТ КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ | 2007 |
|
RU2343657C1 |
| ШИРОКОЗАХВАТНЫЙ КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2002 |
|
RU2220521C2 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2005 |
|
RU2301511C1 |
| КОМПЛЕКСНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ ДЛЯ ПОСЛОЙНОЙ ОБРАБОТКИ ПОЧВЫ | 1999 |
|
RU2160518C1 |
| Плоскорежущий рабочий орган | 1986 |
|
SU1500175A1 |
| ПОЧВООБРАБАТЫВАЮЩИЙ РАБОЧИЙ ОРГАН | 2008 |
|
RU2360391C1 |
Использование: безотвальная обработка почвы с увеличением массы растительных остатков на поверхности поля. Сущность изобретения: устройство содержит широкозахватные плоскорежущие лапы, активные игольные рыхлители и датчик глубины их хода, кинематически связанный с вариатором регулирования угловой скорости, снабжено датчиком поступательной скорости, связанным с выходным валом вариатора. 2 ил
Фиг. 2.
X
Ц
| Комбинированное орудие для безотвальной обработки почвы | 1981 |
|
SU967306A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
