Изобретение относится к регулирующим устройствам аксиально-поршневых гидромашин, в частности к регуляторам мощности, и может быть использовано в гидроприводах строительных, дорожных, сельскохозяйственных и др.. мобильных машин.
Известен регулятор аксиально-поршневой гидромашины, содержащий корпус, в котором размещены регулируемое звено и дифференциальный поршень, шэрнирно соединенные между собой с помощью пальца, неподвижно закрепленного в дифференциальном поршне перпендикулярно его оси. В дифференциальном поршне размещен подпружиненный золотник с возможностью перемещения перпендикулярно оси дифференциального поршня, контактирующий с двуплечим рычагом, ось которого размещена в корпусе регулятора. В корпусе регулятора размещен датчик давления, воздействующий на двуплечий рычаг со стороны, противоположной золотнику. Гидравлические камеры сообщены таким образом, что при перемещении золотника в результате изменения давления поршневая полость дифференциального поршня сообщается с линией высокого давления или слива, поршень смещается, изменяя рабочий объем аксиально-поршневой гидромашины до тех пор. пок$ золотник не примет вновь равновесного положения, перекрыв доступ давлеVI
сл
СО Ю
ния в поршневую полость дифференциального поршня,
К недостаткам данной конструкции относится отсутствие возможности реализации режима постоянной мощности и, следовательно, приводной двигатель будет работать в неблагоприятных условиях, как перегружаясь, так и недогружаясь.
Реализация режима постоянной мощности осуществлена в известной конструкции регулятора мощности аксиально-поршневой гидромашины, содержащей корпус, в котором размещены регулируемое звено (поворотный распределитель) и дифференциальный поршень, шарнирно соединенные между собой с помощью пальца, неподвижно закрепленного в дифференциальном поршне. В центральном отверстии пальца размещен подпружиненный зд отник, контактирующий с двуплечим рыча ом, ось поворота которого размещена в корпусе регулятора и перпендикулярна плоскости золотника и пружины рычага, установленной пар эллё ль йо золотнику в корпусе регулятора со стороны меньшего диаметра дифференциального поршня. Золотник одновременно является датчиком давления, воздействующим на рычаг на плече у от его оси (см. фиг.1) Поддержание постоянной мощности осуществляется за счет того, что величина плеча а воздействият1ружины на рычаУостается неизменной, а плечо воздействия датчика давления у изменяется,,,Указанная конструкция является прототипом. Недостатком описанной конструкции является совмещение функций датчика давления и золотника в одном устройстве, что приводит к увеличению нечувствительности по давлению, особенно при высоких давлениях и малых рабочих объемах гидромаши- ны. Это объясняется следующими особенностями данной конструкции; постоянная мощность на выходе из насоса обеспечивается равенством постоянного момента, возникающего на рычаге от усилия пружины (см. фиг.2), Тпр на плече а, моменту, возникающему от воздействия на рычаг сил датчика давления на переменном плече у, которое уменьшается при росте давления и увеличивается при падении давления. Таким образом, в момент равновесия системы обеспечивается следующее соотношение:
Р Y T
пр
а
где Р - усилие от воздействия датчика на рычаг;
у- плечо приложения усилия отдатчика; Тпр -усилие предварительной настройки пружины;
а - плечо приложения усилия от пружи- ны.
Поскольку Р прямо пропорционально рабочему давлению, а у - рабочему объему, то
Р KI P,(2)
y k2V(3)
где Р - рабочее давление V - рабочий объем;
KI - здесь и далее - постоянные коэффи- циенты.
Подставив (2) и (3) в (1), получим
kiPk2V Tnp -a
(4)
20 или
30
PV ТПр а/(мк2 кз const (4)
Умножив (4) на частоту вращения, имеем25PV n зп k4 const,(5)
где n - частота вращения приводного ёала. Учитывая, что Q V п,(6)
где Ь - поток жидкости, создаваемый насосом, имеем
Р Q const
35
СО
Поскольку произведения потока на рабочее давление - мощность, то
N Const
Перепишем соотношение (4) в следующем виде:
45 или
ktP -kaV-ksPy-Tnp -a (8)
Ру ТПр a/ks
(8)
Исходя из схемы (см. фиг2), повышение давления приводит к смещению золотни50 ка, вызывающему смещение в сторону уменьшения рабочего объема дифференциального поршня, которое прекращается по достижении равновесного состояния, описываемого соот ношением (8) Однако до
55 сообщения поршневой полости дифференциального поршня с линией высокого давления плунжер золотника должен переместиться на величину Ах, определенную положительным перекрытием канавки гильзы пояском плунжера золотника и далее именуемую нечувствительностью, которая определяет величину хода плунжера золотника до момента сообщения поршневой полости дифференциального поршня с линией высокого давления. Поскольку при перемещении плунжера золотника на величину нечувствительности происходит сжатие пружины, воздействующей на рычаг, но не изменяется рабочий объем гидромашины, то выражение (8) примет следующий вид:
(Р + АР)-у 1|СГпр+ ДТПр), (9)
где AT - величина дополнительного усилия от пружины, вызванного перемещением плунжера золотника на величину нечувствительности;
АР - нечувствительность по давлению.
Поскольку усилие от пружины определяется ее жесткостью и деформацией, то
АТпр с Axi,
где с - жесткость пружины;
Axi - деформация пружины, вызванная перемещением плунжера на величину нечувствительности .
Из подобия треугольников (см. фиг.2):
.У - - Ах a xi Axi
где Ах - нечувствительность золотника; или
Axi Ax-a/y(11)
Подставив (11) в (10) и (9), имеем
(12)
Таким образом, прирост давления Р обратно пропорционален квадрату смещения золотника вдоль оси рычага, т.е.
АР
-fe
71
График изменения относительного прироста давления в зависимости от относительного рабочего объема при работе регулятора в режиме постоянной мощности приведен на фиг.З (кривая 28, где А Ре - прирост давления в результате нечувствительности при максимальном рабочем объеме, Т.е. При у Умакс).
Значительный прирост давления в результате нечувствительности вызывает перегрузку приводного двигателя, либо вынуждает недоиспользовать его полную 5 мощность, настраивая регулятор мощности на меньшую величину.
Значительная нечувствительность приводит также к снижению быстродействия регулятора и ухудшению динамических ха- 10 рактеристик системы регулирования.
Целью данного изобретения является повышение эффективности работы путем увеличения чувствительности регулятора, увеличения его быстродействия, увеличе- 15 ние коэффициента использования мощности приводного двигателя.
Цель достигается за счет того, что регулятор мощности аксиально-поршневой гидромашины, содержащий корпус, в котором 20 размещены регулируемое звено и дифференциальный поршень с возвратной пружиной, соединенные между собой с помощью пальца, закрепленного в дифференциальном поршне, золотник с управляющим по- 25 яском, опирающийся на подпружиненный рычаг, ось поворота которого перпендикулярна плоскости золотника и пружины рычага и расположена в корпусе регулятора, датчик давления, размещенный в диффе- 30 ренциальном поршне и контактирующий с рычагом, снабжен рычагом Г-образной формы, золотник подпружинен и размещен в корпусе регулятора, оси золотника и пружины рычага параллельны оси дифференци- 35 ального поршня, при этом пружина рычага размещена в корпусе регулятора со стороны возвратной пружины дифференциального поршня. Золотник через промежуточное звено постоянно контактирует с Г-образ- 40 ным рычагом. При этом расстояние от оси плунжера золотника до оси поворота Г-об- разного рычага у0 определено зависимостью
у0 с -Ах а/(Тпр к). 45
где с - приведенная жесткость пружины, либо системы пружин, воздействующей на рычаг;
Ах - нечувствительность золотника; 50 а - плечо приложения усилия пружины; Тпр-усилие предварительной настройки пружины (либо системы пружин), воздействующей на рычаг, обеспечивающее расчетный режим постоянной мощности; 55 к - коэффициент, учитывающий долю потерь мощности на нечувствительность по отношению к полезной мощности.
Кроме того, регулятор может быть снабжен золотником, размещенным в корпусе
регулятора таким образом, что ось его перпендикулярна оси дифференциального поршня.
Кроме того, регулятор может быть снабжен рычагом, выполненным в виде пластины, один конец которой закреплен на оси, перпендикулярной оси дифференциального поршня, а другой выполнен в виде кулачка, контактирующего с промежуточным звеном, закрепленным на гильзе с помощью фиксирующего элемента с возможностью перемещения. Ось золотника параллельна оси дифференциального поршня и проходит через ось поворота рычага. Датчик давления контактируете поверхностью пластины, расположенной со стороны дифференциального поршня.
Наличие в совокупности существенных признаков указанных отличительных признаков является доказательством соответствия заявляемого технического решения критерию новизна
Аналогов, использующих в совокупности данные отличительные признаки, не обнаружено, поэтому заявляемое техническое решение соответствует критерию существенные отличия.,
При использовании данного технического решения в народном хозяйстве по сравнению с прототипом обеспечивается более высокая чувствительность регулятора, более высокое быстродействие и более высокий коэффициент использования полезной мощности приводного двигателя, следовательно, заявляемое решение соответствует критерию положительный эффект.
На фиг.1 представлена схема регулятора мощности прототипа; на фиг.2 - схема предлагаемоего регулятора мощности; на фиг.З - график зависимости относительного прироста давления в результате нечувствительности; на фиг.4 - компоновочная схема регулятора мощности; на фиг.5 - компоновочная схема регулятора мощности по п.2 формулы изобретения; на фиг б - компоновочная схема регулятора мощности по п.З формулы изобретения; на фиг.7 -место 1 на фиг.б.
Предлагаемый регулятор мощности содержит корпус 1, регулируемое звено 2, палец 3, дифференциальный поршень 4, золотник 5, плунжер б золотника, снабженный управляющим пояском 7 и пружиной 8, Г-образный рычаг 9, пружину 10, датчик 11 давления, пружину 12. Промежуточное звено 13 шарнирно соединено с плунжером 6 золотника. Ось 14 рычага закреплена в корпусе 1. Гильза золотника 15 может быть выполнена как отдельной деталью, так и за
одно целое с корпусом 1. Штокоаая полость 16 дифференциального поршня 4, соединенная Q линией 17 нагнетания и каналом 18, сообщена с полостью под торцом дэтчика 11 давления. Одновременно полость 16 линией 19 сообщена с рабочей камерой 20 золотника 5. Поршневая полость 21 линией 22 сообщена с проточкой золотника 5, перекрываемой управляющим пояском 7 плун0 жера 6 золотника. Камера 23 золотника 5 сообщена со сливом. Пружина 8 золотника регулируется с помощью регулировочного элемента 24.
Кроме того, рычаг 9 может быть выполнен
5 в виде пластины, торец которой снабжен поверхностями 25 и 26, контактирующими с промежуточным звеном 13, выполненным в виде лепестка и закрепленным с помощью фиксирующего элемента 27 на гильзе золот0 ника 15.
Регулятор мощности работает следующим образом.
При увеличении давления в линии 17 нагнетания увеличивается давление и под
5 торцом датчика 11 давления, что вызывает увеличение усилия с его стороны на Г-образный рычаг 9, вызывающий его поворот и сжатие пружины 10. Находившийся до этого в равновесии подпружиненный плунжер зо0 лотника 5, воздействующий на рычаг 9 через промежуточное звено 13, перемещается в гильзе 15, сообщая подпоршневую полость 21 через линию 22, рабочую камеру 20 золотника 5 и линию 19 с линией 17 нагнета5 ния. Ввиду разницы площадей поршневой 21ч штоковой 16 полостей дифференциальный поршень 4 перемещается, уменьшая плечо воздействия датчика 11 давления на Г-образный рычаг 9 до тех пор, пока мо0 мент, возникающий в связи с этим, не уравняется с моментом от воздействия пружины 10 на рычаг 9. В этом случае управляющий поясок 7 плунжера 6 золотника 5 перекрывает давление в поршневую
5 полость 21. В случае уменьшения давления в линии 17 нагнетания процесс повторяется в обратной последовательости, при этом возврату дифференциального поршня 4 способствует возвратная пружины 12.
0 В случае применения рычага 9, выполненного в виде пластины с поверхностями 25 и 26, процесс аналогичен описанному, причем величина перемещения плунжера б золотника 5 определяется профилем повер5 хностей 25 и 26 торца рычага 9.
Описанная конструкция позволяет повысить чувствительность регулятора, увеличить быстродействие и увеличить коэффициент использований полезной мощности приводного двигателя.
Повышение чувствительности обеспе чивается за счет следующего. Поскольку датчик давления и золотник в предлагаемой конструкции не совмещены в одной детали, то, в отличие от прототипа, перемещение датчика у вдоль рычага (см фиг 2) не ведет к изменению координаты уо В этом случае соотношение (11} можно переписать в виде.
Уо Х Дх
a xi Ж
или
Дх-| Ах а/ус
где уо - расстояние от оси плунжера золотника до оси поворота золотника.
Повторив приведенные выше преобразования, имеем
Nr+ AN - Const
(17 )
Рассмотрим отношение потерь мощности Д N к мощности без учета потерь NT
(18)
Подставим выражения для Рт и Д Р из Ю (12) в (18)
ДМ
тг
а2-с
Дх
kiy
а ТПр
а с Дх
j У
kiy а ПрТПр
Т.е относительные потери мощности 15 для прототипа имеют тенденцию к росту в диапазоне малых рабочих объемов
Проведя аналогичные преобразования для проектируемой конструкции, получим, подставив выражения для Рт и Д Р из (15) в 20 (18)
ks V


| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР РАБОЧЕГО ОБЪЕМА АКСИАЛЬНО-ПОРШНЕВОЙ ГИДРОМАШИНЫ | 1994 |
|
RU2099597C1 |
| Регулятор мощности двухпоточной аксиально-поршневой гидромашины | 1990 |
|
SU1765507A1 |
| ПОРШНЕВАЯ ГИДРОМАШИНА С РЕГУЛИРУЕМЫМ РАБОЧИМ ОБЪЕМОМ ПО РАБОЧЕМУ ДАВЛЕНИЮ | 2004 |
|
RU2271468C1 |
| РЕГУЛЯТОР ПОДАЧИ АКСИАЛЬНО-ПОРШНЕВОЙ ГИДРОМАШИНЫ | 1992 |
|
RU2037654C1 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ РАБОЧЕГО ОБЪЕМА АКСИАЛЬНО-ПОРШНЕВОЙ ГИДРОМАШИНЫ | 1996 |
|
RU2107189C1 |
| РЕГУЛЯТОР РАБОЧЕГО ОБЪЕМА ГИДРОМАШИНЫ | 1996 |
|
RU2122652C1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ ГИДРОМАШИНА С РЕГУЛИРУЕМЫМ РАБОЧИМ ОБЪЕМОМ | 2004 |
|
RU2275531C1 |
| ПОРШНЕВАЯ ГИДРОМАШИНА С РЕГУЛИРУЕМЫМ РАБОЧИМ ОБЪЕМОМ И ДОПОЛНИТЕЛЬНЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2271467C1 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ РАБОЧЕГО ОБЪЕМА ДВУХПОТОЧНОЙ АКСИАЛЬНО-ПОРШНЕВОЙ ГИДРОМАШИНЫ | 1996 |
|
RU2107191C1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС С РЕГУЛИРУЕМЫМ РАБОЧИМ ОБЪЕМОМ | 1994 |
|
RU2100646C1 |
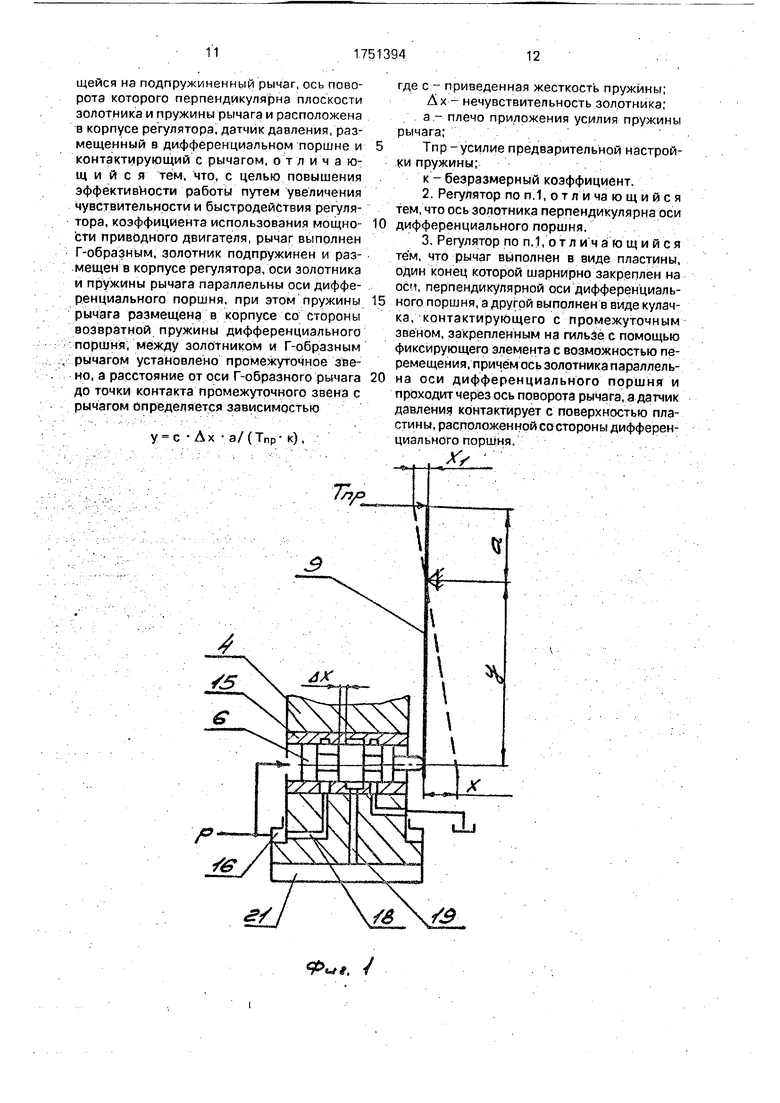



Использование: в регуляторах мощности аксиально-поршневых гидромашин. Сущность изобретения: регулятор мощности содержит корпус 1, регулируемое звено 2, палец 3, дифферециальный поршень 4, золотник 5, плунжер 6 золотника, снабженный управляющим пояском 7 и пружиной 8, Г-образный рычаг 9. пружину 10, датчик 11 давления, пружину 12. Промежуточное звено 13 шарнирно соединено с плунжером золотника 6. Ось рычага 14 закреплена в корпусе 1. Штоковая полость 10 дифференциального поршня 4, соединенная с линией 17 нагнетания и с каналом 18, сообщена с полостью под торцом датчика 11 давления. Одновременно полость 16 линией 19 сообщена с рабочей камерой 20 золотника 5. Поршневая полость 21 линией 22 сообщена с проточкой золотника 5. перекрываемой управляющим пояском 7 плунжера 6 золотника. Камера 23 золотника 5 соединена со сливом. Расстояние от оси Г-образного рычага до точки контакта промежуточного звена с рычагом определяется зависимостью: Y с Д х э/( Тпр К). где с - приведенная жесткость пружины; Ах- нечувствительность золотника; а - плечо приложения усилия пружины рычага: Тпр - усилие от пружины, воздействующей на рычаг; К - безразмерный коэффициент; 2 з.п. ф-лы, 7 ил.
P + Pi
Дх
ki yi уо
где ДРч - прирост давления в результате нечувствительности в случае фиксированного положения золотника относительно оси рычага.
Как видно из соотношения (15), прирост давления в результате нечувствительности обратно пропорционален перемещению датчика давления вдоль оси рычага; сравне- нив с (13), имеем
APl -Uk7l
Уо УУ
Графики изменения относительного прироста далвения в результате нечувствительности при различных значениях у0 приведены на фиг.З (кривые у0 (0,5 - 1,5) Умакс). Как видно из графиков, предлагаемая конструкция имеет значительные преимущества по отношению к прототипу, особенно в диапазоне рабочих объемов
0,75 Умакс - 0.
Повышение коэффициента использования полезной мощности приводного двигателя обеспечивается следующим. При большой нечувствительности необходимо настраивать регулятор мощности в сторону уменьшения, при этом потери полезной мощности в реальных машинах могут доходить до 7-15%.
Подставим (12) в (7):
или
(Рт + ДР) -Q Const (17) РтО+ ДР -Q Const (17)
или
25
ANi ANt
NTNT
a с Дх
a2 с Дх
kiy
kiy0y
Т,
пр
ks
r Const k . (19)
I пр Уо УО
где с - приведенная жесткость пружины, OQ воздействующей на Г-образный рычаг, кг/мм,
Д х - нечувствительность золотника, мм;
а - плечо приложения усилия пружины, мм;
ТПр - усилие предварительной настройте ки пружины, воздействующей на рычаг, обеспечивающее расчетный режим постоянной мощности кг;
к - безразмерный коэффициент, учитывающий долю потерь мощности на нечувст
вительность по отношению к полезной
мощности.
Из этого следует, что относительные потери мощности для проектируемой конструкции остаются нейгзменными во всем
диапазоне рабочих объемов и могут быть определены как угодно жестко на этапе проектирования, задаваясь коэффициентом к, что обеспечивает не только увеличение коэффициента использования полезной мощности приводного двигателя, но и его постоянства и определенности. Формула изобретения 1. Регулятор мощности аксиально-поршневой гидромашины, содержащий корпус,
в котором размещены регулируемое звено и дифференциальный поршень с возвратной пружиной, соединенные между собой с помощью пальца, закрепленного в дифференциальном поршне, золотник с управляющим поясом, расположенный в гильзе, опирающейся на подпружиненный рычаг, ось поворота которого перпендикулярна плоскости золотника и пружины рычага и расположена в корпусе регулятора, датчик давления, размещенный в дифференциальном поршне и контактирующий с рычагом, отличающийся тем, что, с целью повышения эффективности работы путем увеличения чувствительности и быстродействия регулятора, коэффициента использования мощности приводного двигателя, рычаг выполнен Г-образным, золотник подпружинен и размещен в корпусе регулятора, оси золотника и пружины рычага параллельны оси дифференциального поршня, при этом пружины рычага размещена в корпусе со стороны возвратной пружины дифференциального поршня, между золотником и Г-образным рычагом установлено промежуточное звено, а расстояние от оси Г-образного рычага до точки контакта промежуточного звена с рычагом определяется зависимостью
у с -Ах -а/ (Тпр- к),
9W /
где с - приведенная жесткость пружины; Лх - нечувствительность золотника; а - плечо приложения усилия пружины рычага;
Тпр - усилие предварительной настройки пружины;
к - безразмерный коэффициент.
дифференциального поршня,
. .:.
Mb.
X/
f
Фиг.5
S7
| Механизм регулирования подачи аксиально-поршневой гидромашины | 1987 |
|
SU1413267A1 |
