Изобретение относится к автоматике и вычислительной технике, а именно к способам преобразования видеосигнала дистанционного зондирования пространственного объекта.
Цель изобретения состоит в повышении точности преобразования видеосигнала
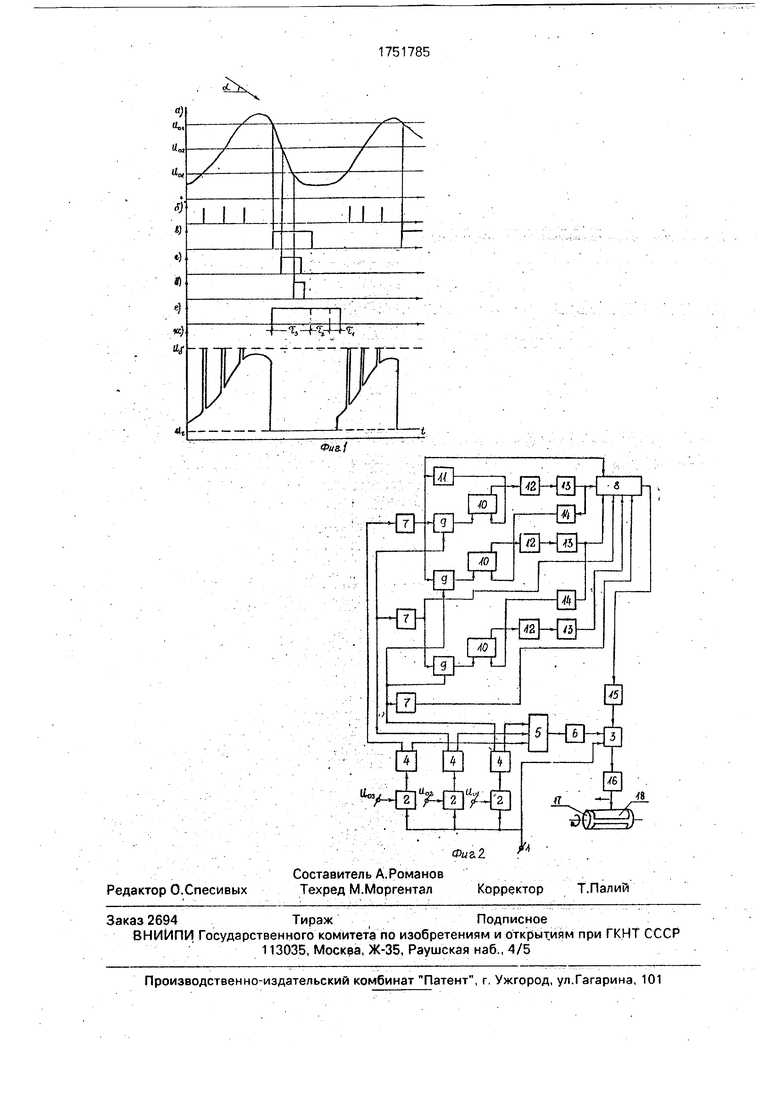
На фиг. 1 показаны временные диаграммы сигналов при осуществлении предлагаемого способа; на фиг 2 - функциональная схема устройства, реализующего предлагаемый способ преобразования видеосигнала.
На диаграмме а (фиг 1) показано напряжение текущей строки видеосигнала, сравниваемого с опорными уровнями, б - последовательность импульсов пересечений видеосигналом опорных уровней с положительным знаком производной, в, г, д - сформированные импульсы пересечений
опорных уро вней с отрицательным знаком производной е -суммарныйимпульс пересечений с отрицательным знаком производной, ж - вид преобразованного видеосигнала
Устройство (фиг 2) содержит выходной зажим 1, компараторы 2, сумматор 3 формирователи 4 импульсов, элемент 5 ИЛИ, формирователь 6 импульсов, мультивибраторы 7, элемент 8 ИЛИ, элемент 9 И триггеры 10, формирователи 11, 12 импульсов, мультивибраторы 13, формирователи 14 15 импульсов, блок 16 записи, развертывающий барабан 17 с носителем 18
Устройство работает следующим образом.
Входной сигнал по зажиму 1 поступает на компараторы 2 с рас.дельными зажимами опорных уровней. Перепады напряжений, длительность которых соответствует времени превышения входным сигналом опорных
ч ел
VJ
00
я
го
уровней, поступают на формирователи 4, выдающие на свои раздельные выходы импульсы в зависимости от направления изме- нения входного сигнала в моменты пересечения опорных уровней. Импульсы пересечений с положительным знаком производной собираются элементом ИЛИ 5, выходная последовательность импульсов которого формируется формирователем 6 и подается на сумматор 3 напряжений. Импульсы же пересечений с отрицательным знаком производной с выходов формирователей 4 подаются на мультивибраторы 7 и элементы И 9 Выходные импульсы мультивибраторов 7 поступают непосредственно на элемент ИЛИ 8, выходной сигнал которого преобразуется формирователем 15 в форму, пригодную для регистрации на носителе записи, и поступает на сумматор 3 напряжений.
Рассмотрим работу устройства в том случае, когда входной видеосигнал пересекает все приведенные в данном примере три опорные уровня. Тогда элементы И 9 пропускают импульсы пересечений меньших опорных уровней, при помощи которых опрокидываются триггеры 10. Формирователь 11 из заднего фронта входного сигнала формирует короткий импульс, опрокидывающий триггер 10, что вызывает срабатывание формирователя 12 импульсов и мультивибратора 13, длительность выход- ного импульса которого соответствует длительности импульса пересечения входным видеосигналом второго опорного уровня. При окончании импульса мультивибратора 13 срабатывает формирователь 14 выходной импульс которого опрокидывает соответствующий триггер 10, вследствие чего запускается мультивибратор 13, длительность выходного импульса которого соответствует длительности импульса
пересечения входным видеосигналом первого опорного уровня с отрицательным знаком производной Аналогично срабатывает и третий мультивибратор 13, длительность
выходного импульса которого также соответствует длительности импульса пересечения первого уровня, Таким образом, на входы элемента ИЛИ 8 последовательно поступают импульсы что обеспечивает получение на его выходе импульса суммарной длительностью Выходной сигнал элемента ИЛИ 8 формируется формирователем в отрицательную полярность, суммируется с по- ложительными импульсами с выхода
формирователя бис входным видеосигналом при помощи сумматора 3 напряжений Сформированный видеосигнал поступает на блок 16 записи и регистрируется на носи теле 18 записи, закрепленном на развертывающем барабане 17
Таким образом, полученное изображение обеспэчивает более отчетливое выраже- ние псевдорельефа за счет того, что продолжительность теней на исходном
изображении соответствует действительной величине перепада видеосигнала с отрицательным знаком производной. Формула изобрете-ния Способ преобразования видеосигнала дистанционного зондирования пространственного объекта по авт ев N; 1444839, отличающийся тем, что, с целью повышения точности преобразования видеосигнала, каждый перекрывающийся импульс, сформированный в момент пересечения видеосигналом опорных уровней с отрицательным значением производной, начиная с второго, задерживают на период окончания длительности импульса предыдущего опорного уровня и последоватёльно суммируют их длительности до полного преобразования видеосигнала до уровня черного.
«9 «.,
« «
f) t)
) 8)
$
) tt/|-TT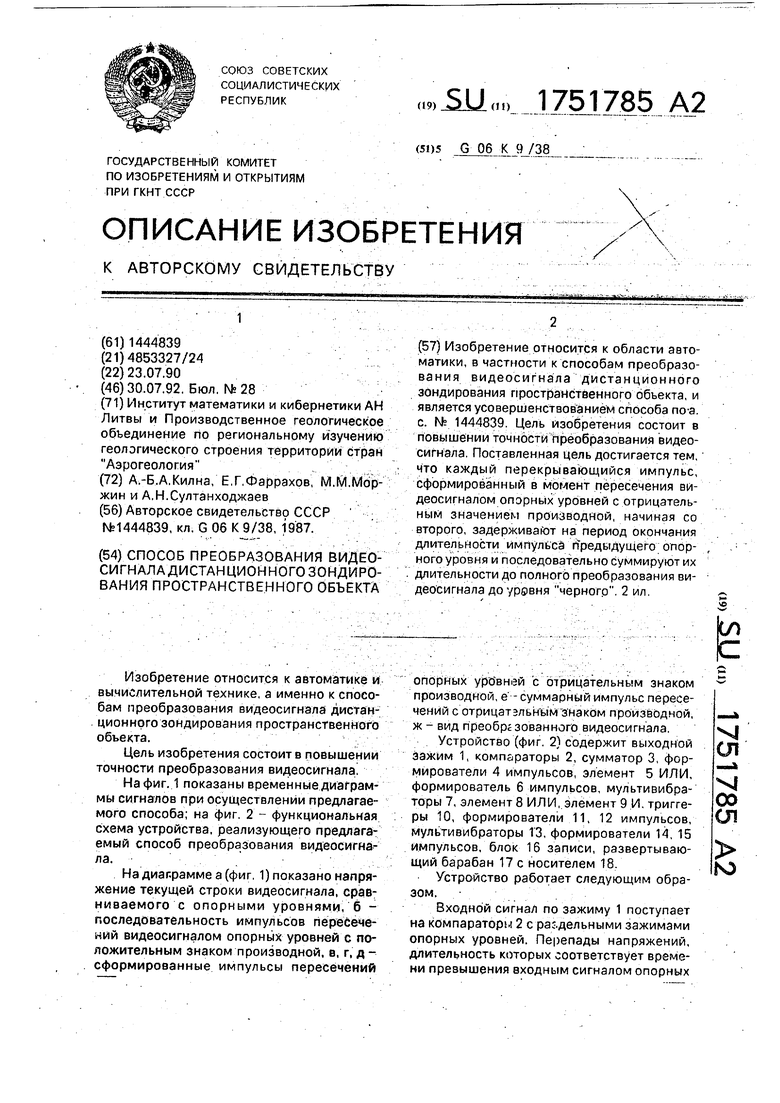

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ преобразования видеосигнала дистанционного зондирования пространственного объекта | 1987 |
|
SU1444839A1 |
| Устройство для преобразования видеосигнала | 1989 |
|
SU1783555A1 |
| Способ преобразования видеосигнала дистанционного зондирования пространственного объекта | 1984 |
|
SU1336060A1 |
| Способ формирования видеосигнала изображения | 1987 |
|
SU1467792A1 |
| Устройство для воспроизведения цифровой информации с носителя магнитной записи | 1987 |
|
SU1525732A1 |
| Способ записи изображения | 1986 |
|
SU1406824A1 |
| Способ формирования видеосигнала изображения | 1986 |
|
SU1462513A1 |
| Способ формирования видеосигнала изображения | 1990 |
|
SU1764185A1 |
| Способ формирования видеосигнала изображения | 1988 |
|
SU1669083A2 |
| Способ формирования сигнала изображения | 1989 |
|
SU1660206A2 |
Изобретение относится к области автоматики, в частности к способам преобразования видеосигнала дистанционного зондирования пространственного объекта, и является усовершенствованием способа по а с. № 1444839 Цель изобретения состоит в повышении точности преобразования видеосигнала Поставленная цель достигается тем что каждый перекрывающийся импульс, сформированный в момент пересечения видеосигналом опорных уровней с отрицательным значением производной, начиная со второго, задерживают на период окончания длительности импульса предыдущего опорного уровня и последовательно суммируют их длительности до полного преобразования видеосигнала до уровня черного 2 ил
1,
Поз.,
МЗ МЮ ЧЗ .
| Способ преобразования видеосигнала дистанционного зондирования пространственного объекта | 1987 |
|
SU1444839A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
