Изобретение относится к контрольно- измерительной технике, в частности к методам динамической градуировки пьезоэлектрических датчиков давления и калибровки ультразвуковых приборов неразрушающего контроля материалов и изделий
Известен способ динамической тарировки датчиков давлений путем возбуждения с помощью механического удара акустической волны в рабочей среде, передающей давление на чувствительный элемент пьезопреобразователя, регистрации выходного сигнала пьезопреобразователя и сопоставления его параметров с параметрами давления в рабочей среде, полученными в результате расчета по известным зависимостям.
Недостатком способа является низкая точность градуировки пьезоэлектрических датчиков давления. Это связано с тем, что акустический импульс, возникающий в результате соударения, имеет относительно большую длительность и, соответственно, узкую полосу частот возбуждаемых ультразвуковых колебаний. Для уменьшения длительности возбуждаемых акустических сигналов необходимо обеспечивать высокие скорости соударения, что практически трудно реализуемо.
Наиболее близким к изобретению является способ динамической тарировки пьезоэлектрических датчиков давления, заключающийся в возбуждении акустической волны пучком зар$ женных частиц в расэ ы
бочей среде, передающей давление на чувствительный элемент пьезоэлектрического преобразоавтеля, регистрации его выходного сигнала и сопоставления его с расчет- ными параметрами давления рабочей среды.
Недостатком данного способа является низкая точность градуировки пьезоэлектрических преобразователей давления, поскольку расчет параметров давления основан на измерении полной энергии, вносимой пучком заряженных частиц за импульс в рабочую среду. При этом погрешность измерения упомянутой энергии достаточно велика и составляет на практике 30
-50%.
Кроме того, у современных сильноточных ускорителей электронов, пригодных для генерации ультразвуковых колебаний в твердых телах, наиболее нестабильным па- раметром является число частиц в токовом импульсе, достигающее в зависимости от типа используемого ускорителя 10-40 %.
Цель изобретения - повышение точности градуировки пьезоэлектрических датчи- ков давления.
Цель достигается тем, что в способе динамической градуировки пьезоэлектрических датчиков давления путем возбуждения пучком заряженных частиц от ускорителя акустической волны в рабочей среде, передающей импульс давления на градуируемый датчик, регистрации выходного сигнала датчика и сопоставления его с расчетными параметрами импульса давления, предварительно определяют долю импульса давления, создаваемого одной заряженной частицей, поглощенной в рабочей среде, а затем определяют импульс давления, создаваемого пучком заряженных час- тиц в рабочей среде, как сумму импульсов, создаваемых каждой заряженной частицей.
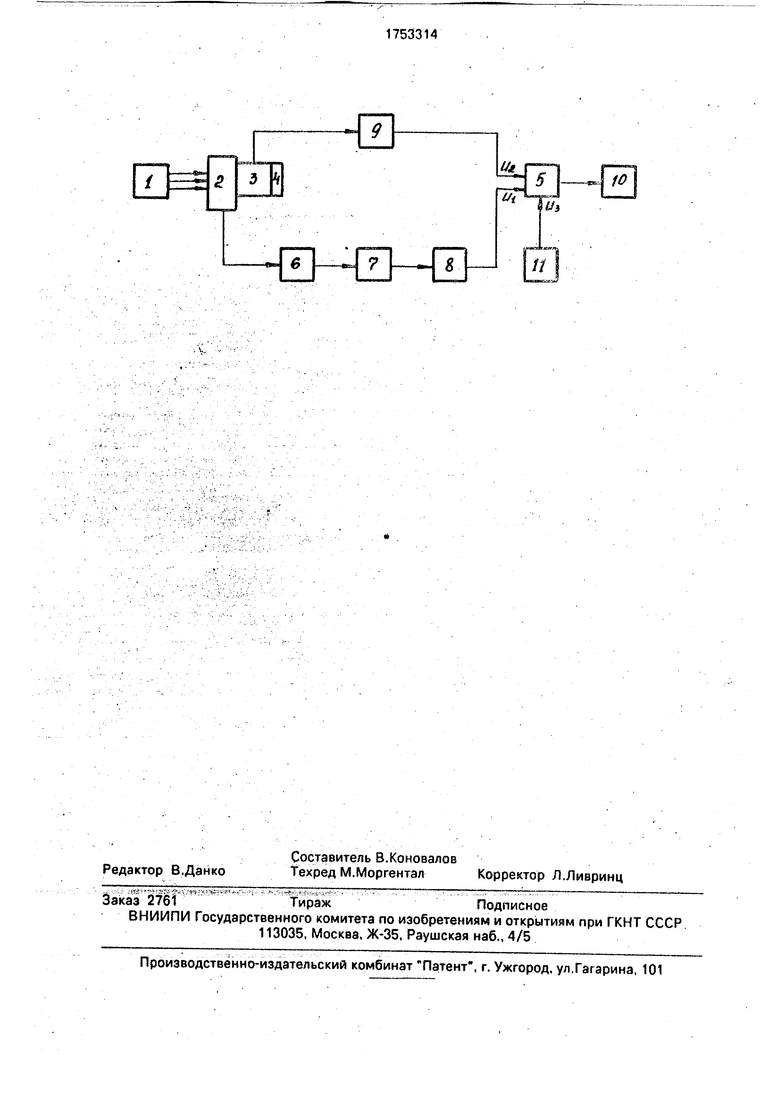
На чертеже представлена блок-схема устройства, реализующего предлагаемый способ динамической градуировки пьезоэ- лектрических датчиков давления.
Устройство для осуществления способа содержит импульсный ускоритель 1 заряженных частиц с регулируемыми параметрами импульса тока, рабочую среду 2, выполненную из токопроводящего материала с акустическим волновым сопротивлением, близким к волновому сопротивлению градуируемого пьезоэлектрического датчика 3 давления. Датчик 3 давления имеет стабильный акустический контакт с рабочей средой 2 с помощью контактной смазки и фиксирующего приспособления 4, в качестве которого могут быть использованы прижимная гайка, пружина, постоянный магнит
и др. Электрический выход рабочей среды 2 подключен к первому входу блока 5 обработки через последовательно включенные блок 6 съема электрического сигнала, усилитель 7 и линию 8 задержки. Рабочая среда 2 и блок 6 съема электрического сигнала, усилитель 7 и линию 8 задержки. Рабочая среда 2 и блок б съема электрического сигнала функционально составляют модифицированный цилиндр Фарадея, в котором коллектор для сбора заряженных частиц одновременно используется в качестве материала рабочей среды 2.
Блок б съема электрического сигнала выполнен в виде коаксиальной распайки набора проходных конденсаторов, включенных параллельно. При этом внутренний электрод каждого конденсатора одним из своих выводов соединен с поверхностью рабочей среды 2 (электрический выход рабочей среды), а выход группы проходных конденсаторов соединен с коаксиальным кабелем через согласующий резистор R 75 Ом. Электричекий выход пьезоэлектрического датчика 3 давления подключен через широкополосный импульсный усилитель 9 типа УЗ-29 к второму входу блока 5 обработки, к выходу которого подключен блок 10 индикации. К третьему входу блока 5 обработки подключен блок 11 памяти. В состав блока 5 обработки могут входить интерфейс и ЭВМ.
В качестве ускорителя может быть использован импульсный малогабаритный ускоритель заряженных частиц, смонтированный на базе импульсного рентгеновского аппарата МИРА-2Д с использованием вакуумного диода ИМАЗ-150Э, обеспечивающего вывод электронного пучка в атмосферу. Выводным окном является фольга из бериллия толщиной 0,1 мм. Параметры ускорителя электронов следующие: длительность импульса тока 10 не, максимальная амплитуда тока в импульсе 90 А, частота следования импульсов тока 10 Гц, энергия электронов в пучке 0,2 МэВ, эффективный диаметр пучка электронов 6 мм.
Существующие наносекундны е ускорители электронов позволяют работать с необходимой частотой следования импульсов пучков заряженных частиц, а плотность потока электронов регулируется простым перемещением мишени от коллиматора ускорителя или длительностью импульса тока частиц.
Класс Обработки передней поверхности рабочей среды (мишени) - поверхности ввода пучка заряженных частиц выбирается исходя из следующего условия: RZ 0.1 L, где RZ высота шероховатостей, L - глубина
проникновения заряженных частиц с данной энергией в материал рабочей среды. Выполнение данного условия обеспечивает детерминированный механизм возбуждения акустических импульсов вследствие ярко выраженного подповерхностного характера поглощения заряженных частиц. Требования к классу обработки поверхности тыльной стороны рабочей среды являются стандартными требованиями к поверхности съема акустического сигнала с помощью пьезоэлектрического элемента.
Способ осуществляется следующим образом.
Импульсный пучок заряженных частиц, излучаемый ускорителем 1. падает на поверхность рабочей среды 2, находящейся в акустическом контакте с градуируемым пьезоэлектрическим датчиком 3 давления.
При взаимодействии импульсного пучка заряженных частиц с веществом рабочей среды 2 энергия частиц практически мгновенно поглощается в локальном объеме, определяемом глубиной проникновения заряжённых частиц в вещество мишени и поперечными размерами пучка, так как время диссипации энергии быстрой заряженной частицы в конденсированной среде составляет - с. Это, в свою очередь, приводит к формированию поля термоупругих механических напряжений, разгрузка которых идет путем излучения из зоны возбуждения акустического импульса, который приходит на чувствительный элемент градуируемого преобразователя 3.
Один из вариантов определения числа частиц, поглощенных в объеме токопрово- дящей рабочей среды 2 при энергии электронов в пучке более 5 кэВ, основан на интегрировании тока пучка на известной емкости Сэкв и определяют из соотношения
N
Ur
Ре
(1+d)
где Um - амплитуда электрического напряжения на известной емкости Сэкв. пропорциональная току пучка частиц, поглощенных в объеме рабочей среды;
Сэкв - эквивалентная емкость, определяемая параллельным включением емкости коллектора и паразитной емкости:
qe - заряд электрона; д - коэффициент вторичной электронной эмиссии, который является известной величиной и зависит от свойств и структуры материала, энергий первичных электронов и угла падения первичного пучка заряженных частиц на поверхность рабочей среды.
Эквивалентная емкость Сэкв с достаточ ной точностью определяется известным резонансным способом в сочетании с методом замещения.
Расчет давления в объеме рабочей среды, создаваемого одной частицей, выполняют согласно выражения
10
Р(хд) ГД (x,t),
где Г - постоянная Грюнайзена:
х - координата вдоль оси пучка;
t текущее время;
Д t,t) величина поглощенной дозы (плотность поглощенной энергии, создаваемой одной частицей).
В волновой системе координат (в плоской ак стичес сой волне)
20
Р(хд) - P(x-Set) ГД (х - Set).
Величина Д(х) строго рассчитывается с ю соотношения
ДМ
ма-кса Е
Эх
rf
ЭЕ
где -J-- - удельные ионизационные потери
в материале мишени, которые известны дня широкого типа материалов различного типа частиц и в широком диапазоне энергий ,- тиц;
Рмакс максимальная глубина пробега заряженных частиц с данной энергией в веществе мишени;
Se - скорость продольных звуковых
8ОПН.
Процесс градуировки пьезоэлектрических датчикоа 3 давления заключается в оп- ределгнми числа частиц, поглощенных а объеме рабочей среды 2, и сопоставлении значения выходного электрического сигнала градуируемого датчика 3 давления с рас- чепшм давлением в объеме рабочей среды 2, создаваемым пучком заряженных частиц, как суммой импульсов, создаваемых каждой заряженной частицей.
В заявляемом способе точность градуировки пьезоэлектрических датчиков давления определяется лишь погрешностью расчета давления в объеме рабочей среды 2, создаваемого одной частицей, и является
несравнимо малой величиной, учитывая пренебрежимо малую погрешность определения числа частицч поглощенных в объеме рабочей среды (0,5 - 2) %.
В случае, когда длительность импульса тока ускорителя меньше характерного времени продольного запаздывания звука, определяемого как время пробега продольной акустической волной расстояния, равного глубине проникновения заряженных частиц в веществе мишени, длительность возбуждаемых акустических сигналов равна
R, рТС
где R3 - глубина проникновения заряженных частиц в массовых единицах длин;
р- плотность материала мишени.
R3 определяется максимальной энергией в спектре заряженных частиц и для электронов с энергией до 4 МэВ является постоянной величиной, так как Рэ для большинства типов заряженных частиц (электроны, ионы, а-частицы и т.д.) в широком диапазоне энергий табулируется или рассчитывается с высокой степенью точности, то длительность акустических сигналов,возбуждаемых пучками заряженных частиц в различных материалах, можно определять как экспериментально, так и путем расчета. Это обстоятельство позволяет, не делая строгого анализа спектрального состава генерируемых акустических сигналов, определять их примерную эффективную полосу частот с помощью известногоо из спектральной теории соотношения
Лш А г i
где - полоса частот генерируемого акустического сигнала;
Л т - величина, соответствующая длительности возбуждаемого акустического сигнала т0;
р, - постоянная величина, определяемая формой импульса и зависящая от выбора значений До и Аг,
Если аппроксимировать акустический сигнал, возбуждаемый пучком заряженных частиц в твердом теле гаусовской кривой, то /г-1,22.
Выбирая соответствующий поглотитель или регулируя энергию частиц, можно менять длительность градуируемого импульса давлений по частот порядка сотен мегагерц.
Устройство, реализующее предлагаемый способ, работает следующим образом.
Перед градуировкой преобразователя с помощью вспомогательного осциллографа для получения электрического напряжения с градуируемого преобразователя с возможно большим превышением над уровнем собственных шумов, изменением плотности потока электронов в импульсе ускорителя
0
5
добиваются максимального значения коэффициента преобразования акустической энергии в электрическую, Рабочую среду 2 облучают импульсным пучком заряженных частиц. При поглощении пучка заряженных частиц в материале рабочей среды 2 в ней возбуждается акустический импульс, который приходит на чувствительный элемент градуируемого датчика 2 давления. Малая величина времени диссипации энергии электронов (10 - с) по сравнению с длительностью импульса тока ускорителя 1 заряженных частиц, которая в зависимости от типа ускорителя составляет - 10 с,
0
приводит к тому, что практически мгновенно после окончания облучения эквивалентная емкость Сэкв, определяемая параллельным включением емкости коллектора и паразитной емкости, заряжается до своего максимального значения. При этом параметры возбуждаемого акустического импульса однозначно определяются параметрами импульса тока ускорителя 1 заряженных частиц и термоупругими 5 характеристиками рабочей среды 2.
Возникающая же термоэлектронная эмиссия оказывает пренебрежимо малое влияние на точность градуировки пьезоэлектрических датчиков давления, так как значение тока термоэлектронной эмиссии пренебрежимо мало по сравнению с током ускорителя заряженных частиц, что обус- ловпено холодной поверхностью рабочей среды 2.
Пучок заряженных частиц, падающий на поверхность рабочей среды 2, приводит к образованию электрического тока, который интегрируется на известной эквивалентной емкости С экв, а амплитуда импульса напряжения определяется из выражения
0
5
0
Um
То
где г0 - длительность импульса тока ускорителя.
Время зарчда емкости определяется
длительностью импульса тока ускорителя. Разрядом же емкости при измерении тока
коллектора (мишени) можно пренебречь, так как время разряда, определяемое сопротивлением утечкк RyT и Сэкв, составляет единицы миллисекунд. Сопротивление R блока 6 съема электрического сигнала
выбрано равным 75 Ом, что обеспечивает согласование с волновым сопротивлением кабеля и исключает возникновение переходного процесса, связанного с отражением электрического сигнала от измерительного конца длинной линии.
С помощью усилителя 7 значение напряжения (Um) умножается на постоянный коэффициент К
К--(1 ) const.
Линия 8 задержки (типа С7-8) обеспечивает синхронность появления электрических импульсов напряжения на обоих входах блока 5 отношения.
Электрический сигнал, являющийся реакцией датчика давления на приход акустического импульса, поступает на вход широкополосного усилителя 9 с полосой пропускания 100 мГци коэффициентом усиления 25 дБ. Выбор параметров усилителя 9 (полоса пропускания, коэффициент усиления) определяется параметрами исходного акустического сигнала и рабочим диапазоном амплитуд входных сигналов блока 5 обработки. Так как исходный акустический импульс, возбуждаемый в рабочей среде импульсным пучком электронов с длительностью импульса г0 10 не и энергией электронов Е 0,2 МэВ, имеет длительность г (30 - 40 не}и полосу частот не менее 30 мГц, то амплитуда электрического сигнала, снимаемого с выхода градуируемого датчика давления, составляет десятки милливольт. С выхода усилителя 9 усиленный электрический сигнал поступает на второй вход блока 5 обработки. Блок 5 обработки на основании данных о значении выходного электрического напряжения градуируемого датчика 3 давления, а также информации с блока 11 памяти о величине поглощенной дозы (плотности поглощенной энерги, создаваемой одной частицей), используемого материала рабочей среды 2 и типа используемых частиц по заданной программе производит расчет давления в объеме рабочей среды, создаваемого одной частицей, и сопоставление значения выходного сигнала градуируемого датчика 3 давления с расчетным давлением в объеме рабочей среды, создаваемым одной частицей. Современные ЭВМ обладают достаточным быстродействием. Результат сопоставления представлен блоком 10 индикации.
Техническое преимущество предлагаемого способа в сравнении с известным заключается в существенном повышении точности динамической градуировки пьезоэлектрических датчиков давления. Кроме того, изобретение делает возможным осуществлять калибровку чувствительности градуируемых датчиков давления путем установки допустимых отклонений параметров датчиков давлений, что обеспечивает взаимозаменяемость последних. Способ
позволяет также автоматизировать процесс динамической градуировки при одновременном повышении его производительности, позволяя при этом градуировать как широкополосные апериодические, так и резонансные пьезоэлектрические датчики давления.
Формула изобретения
1.Способ динамической градуировки пьезоэлектрических датчиков давления путем возбуждения пучком заряженных частиц от ускорителя акустической волны в рабочей среде, передающей импульс давления на градуируемый датчик давления, регистрации выходного сигнала датчика и сопоставления его с расчетными параметрами импульса давления, отличающий- с я тем, что, с целью повышения точности градуировки, предварительно определяют
долю импульса давления, создаваемого одной заряженной частицей, поглощенной в рабочей среде, а затем определяют импульс давления, создаваемого пучком заряженных частиц в рабочей среде, как сумму импульсов, создаваемых каждой заряженной частицей.
2.Способ по п.1,отличающийся тем, что число частиц N, поглощенных в электропроводной рабочей среде, при энергии каждой частицы, большей 5 кэВ, определяют путем измерения электрического напряжения Um, возникающего на рабочей среде при поглощении заряженных частиц, по соотношению
Um Сэ| .( 1 +д
N
где Сэкз - электрическая емкость электро- проводной среды с присоединенными деталями;
е - заряд электрона; д- коэффициент вторичной электронной эмиссии электропроводной среды.
-ч
ю

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамической градуировки пьезоэлектрических преобразователей | 1986 |
|
SU1436281A1 |
| Способ динамической тарировки пьезоэлектрических датчиков давления и устройство для его осуществления | 1979 |
|
SU854132A1 |
| СПОСОБ ДИАГНОСТИКИ ИМПУЛЬСНЫХ ПУЧКОВ ЗАРЯЖЕННЫХ ЧАСТИЦ | 1989 |
|
SU1676354A1 |
| Устройство для градуировки электроакустических преобразователей | 2020 |
|
RU2782354C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭНЕРГИИ ТЯЖЕЛЫХ ЗАРЯЖЕННЫХ ЧАСТИЦ | 1991 |
|
RU2007898C1 |
| Устройство для градуировки акустического приемника и способ для ее осуществления | 1978 |
|
SU782186A1 |
| Способ контроля параметров газовой среды и устройство для его осуществления | 1983 |
|
SU1262317A1 |
| Способ регулировки режима ускорения в многосекционном линейном ускорителе и устройство для его осуществления | 1985 |
|
SU1292212A1 |
| Способ абсолютной градуировки излучающих и приемных электроакустических преобразователей антенного блока акустического доплеровского профилографа течений | 2023 |
|
RU2821706C1 |
| Способ автоматической фокусировки импульсного пучка заряженных частиц | 1989 |
|
SU1695397A1 |
Изобретение относится к измерительной технике и может быть использовано для градуировки пьезоэлектрических датчиков давления. Цель изобретения - повышение точности градуировки. Это достигается тем, что в рабочей среде, к которой механически присоединен градуируемый датчик давления, возбуждаются акустические волны пучком заряженных частиц от ускорителя, которые действуют на датчик давления. Определение числа частиц, поглощенных в объеме рабочей среды, производится по соUm Сэкв отношению N Ре
| 0 |
|
SU169840A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ динамической тарировки пьезоэлектрических датчиков давления и устройство для его осуществления | 1979 |
|
SU854132A1 |
