Изобретение относится к измерительной технике и может быть использовано для измерения величин, сопровождающихся значительным силовведением и перегрузками.
Известен тензорезисторный датчик силы, принятый в качестве аналога, у которого упругий элемент в форме тела вращения, на подрезисторных выступах которого размещены тензорезисторы, свободно установлен на круговую призму корпуса и своей силовводящей частью сопряжен с корпусом герметизирующей кольцевой мембраной.
К недостаткам этого датчика относится незащищенность его от перегрузок и силов- ведеиия.
Известен тензорезисторный датчик силы, в котором осевое перемещение упругого элемента при перегрузках ограничено упорами на корпусе и крышке.
К недостаткам известного датчика относят невозможность регулирования допустимой степени перегрузки без разгерметизации датчика и отсутствие защиты от боковых паразитных нагрузок.
Цель изобретения - повышение точности за счет уменьшения чувствительности к поперечным нагрузкам и защита датчика от перегрузки,
С целью повышения точности за счет уменьшения чувствительности к поперечным нагрузкам в теизорезисторном датчике силы, содержащем корпус, упругий элемент и силовводящуго часть, введены два дополнительных упругих элемента, соосных основному, расположенные по обе стороны от него и сопряженные с силовводящим элементом и корпусом, при этом один из дополнительных упругих элементов установлен с образованием зазора между его торцовой поверхностью и корпусом датчика, а осевая жесткость дополнительных упругих элементов по крайней мере на порядок меньше осевой жесткости основного упругого элемента.
С целью защиты датчика от перегрузок в него введен дополнительный корпус с выполненной в его средней части скошенной площадкой, регулируемый упор, сопряженный с указанной площадкой и регулировоч- ные элементы, расположенные в дополнительном корпусе.
На чертеже изображен предлагаемый датчик.
Датчик состоит из основного упругого элемента 1, выполненного в форме тела вращения, на подрезисторных выступах кольцевой части которого размещены тензорезмсторы 2 и 3, силовводящей части
4, дополнительных упругих элементов 5 и 6, расположенных в основном корпусе 7, который в свою очередь находится в дополнительном корпусе 8, упора 9, перемещаемого с помощью регулировочных винтов 10, имеющих свои контргайки 11 и фиксатора 12.
Датчик работает следующим образом.
0 После размещения тензорезисторов на основном упругом элементе, все упругие элементы сопрягаются с силовводящей частью и помещаются в основной корпус. При этом между торцовой поверхностью допол5 нительного упругого элемента 5 и основным корпусом 7 D расточке образуется зазор As. После выборки этого зазора за счет осевой деформации дополнительного упругого элемента 5 и его фиксации от относительного
0 осевого перемещения в корпусе 7 с помощью фиксатора 12, силовводящая часть датчика оказывается нагруженной осевой силой Рб Cs AS, где Cs коэффициент осевой жесткости дополнительного упругого элемента 5. Под действием силы FS будет иметь место и осевая деформация упругих элементов 1 и б на величину FS
5
Д|,б 0
5
где Ci и Се соответственно
0
5
0
5
Ci + Се
коэффициенты осевых жесткостей упругих элементов 1 и б.
Ввиду того, что осевая жесткость дополнительных упругих элементов по крайней мере на порядок меньше осевой жесткости основного упругого элемента Ci Co, Ci Cs, осевое перемещение Дч.е силовводящей части будет незначительным и разгрузка дополнительного упругого элемента 5 будет также незначительна. Под действием измеряемой силы F произойдет догрузка основного упругого элемента 1 и дополнительного упругого элемента 6 и разгрузка дополнительного упругого элемента 5.
Однако, если при этом соблюдается условие Аз Ai.e , где Д4 - допустимое из условий возможной перегрузки датчика осевое перемещение силовводящей части 4, то полной разгрузки упругого элемента 5 не произойдет. Так как дополнительные упругие элементы 5 и б обладают невысокой осевой и высокой радиальной жесткостями, то действие поперечной силы Fn через них передается от силовводящей части на основной корпус датчика и в минимальной степени воспринимается основным упругим элементом, который, в свою очередь, малочувствителен к поперечным нагрузкам. Это обуславливает высокую точность измерения при действии, боковых паразитных нагрузок.
Так как осевая деформация совокупности упругих элементов невелика, то при необходимости защиты датчика от перегрузки основной корпус размещается в дополнительном корпусе, в центральной части которого установлен упор, имеющий на сопрягаемой с корпусом поверхности скос под углом а и фиксируемый s радиальном направлении винтом 10. С помощью этих винтов и устанавливается осевой зазор Л между упором 9 и силовводящей частью 4, выборка которого предотвращает дальнейшее нагружение упругих элементов. Под действием осевых сил меридиональное сечение кольцевой части основного упругого элемента 1 поворачивается, что обуславливает приращение деформаций разных:знаков для тензорезисторов 2 и 3. Последнее позволяет реализовать измерительную схему с четырьмя активными тензорезисторами.,: г ,
Техническими преимуществами датчика является уменьшение чувствительности к поперечным нагрузкам, что обеспечивает высокую точность измерений и защита датчика от перегрузки.:i
Формула и зо б ре т е н и я
1.Тензорезйсторный датчик силы, содержащий размещенные в корпусе силовво- дящий элемент и упругий элемент,
выполненный в форме тела вращения с размещенными на нем тен:зррезисторами, о т л и чаю щи и с я тем, что, с целью
повышения точности за с;чет уменьшения чувствительности к поперечным нагрузкам,
в него введены два дополнительныхупругих элемента, соосных с основным, расположенных по обе стороны от него и сопряженных с силовводящим элементом и корпусом, при этом один из дбпЬлнителЬнМх упругих
элементов установлен ic образованием зазора между его торцовой ловерхностью и корпусом датчика, а ;осевая; жесткость дополнительных упругих элементов по крайней мере на порядок меньше осевой
жесткости основного упругого элемента.
2.Датчик по п. 1, о т л и ч а ю щ и и с я тем. что, с целью защиты датчика от пёрегрузок, в него введены допЪднительныи корпус с выполненной в его средней части
скошенной площадкой, регулируемый упор, сопряженный с указанной площадкой, и регулировочные элементы, установленные в
дополнительном, корпусе.. .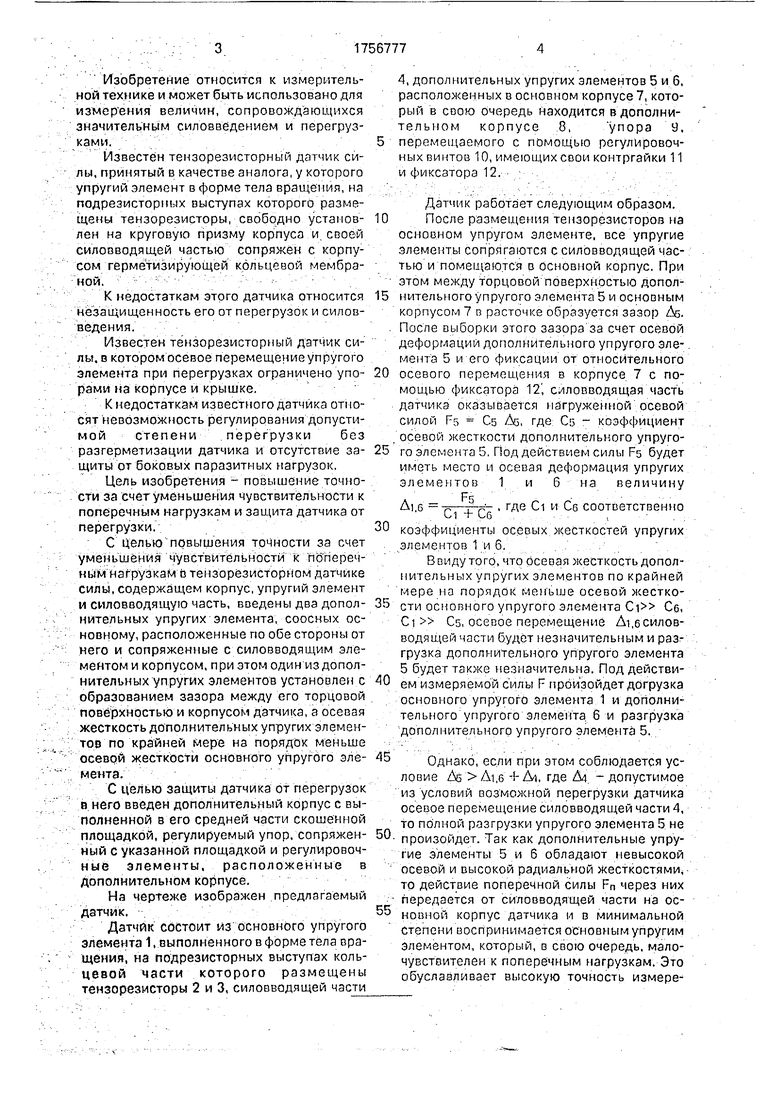

| название | год | авторы | номер документа |
|---|---|---|---|
| Силоизмерительный тензодатчик | 1990 |
|
SU1760393A1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2013 |
|
RU2533536C1 |
| ДАТЧИК СИЛЫ | 1992 |
|
RU2069326C1 |
| Тензорезисторный датчик силы | 1989 |
|
SU1684605A1 |
| Тензорезисторный датчик силы | 1986 |
|
SU1352256A1 |
| Широкодиапазонный датчик растяжения-сжатия | 1989 |
|
SU1682836A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗОВ НА КРАНАХ | 1992 |
|
RU2069320C1 |
| Тензорезисторный датчик силы | 1982 |
|
SU1027546A1 |
| Тензорезисторный датчик силы | 1986 |
|
SU1383116A2 |
| Тензорезисторный датчик силы | 1990 |
|
SU1742650A1 |
Изобретение относится к измерительной технике и касается измерения величин, сопровождающихся значительным силовве- дением и перегрузками. Цель изобретения - повышение точности измерения и надежности. Датчик силы содержит cf ловводящий 12 Ю 11 элемент, упругий элемент 1. выполненный в форме тела вращения с тензорезмсторами 2,3 и два дополнительных упругих элемента 5,6, соосных основному, расположенных от него по обе стороны и сопряженных с силов- водящим элементом и корпусом. Один из дополнительных упругих элементов установлен в корпусе с образованием осевою зазора между торцовой поверхностью и корпусом датчика, а осевая жесткость дополнительных упругих элементов 5,6 по крайней мере на порядок меньше осевой жесткости основного упругого элемента Кроме того, датчик силы содержит дополни- тельный корпус 8 со скошенной площадкой и сопряженный с ней регулируемый упор 9 1 з.п. ф-лы, 1 ил. & (Л с VI ел ON VI ч XI
| 0 |
|
SU298997A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тензорезисторный датчик силы | 1982 |
|
SU1027546A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
