Фиг. Ч
Изобретение относится к приборам для демонстрации колебаний пружинного маятника.
Известен прибор для демонстрации колебаний пружинного маятника, содержащий подпружиненный сверху и снизу постоянный магнит, расположенный внутри электромагнитной катушки,
Недостатками известного прибора являются невысокие дидактические возможности. Целью настоящего изобретения является расширение дидактических возможностей путем повышения наглядности демонстрации колебательного процесса.
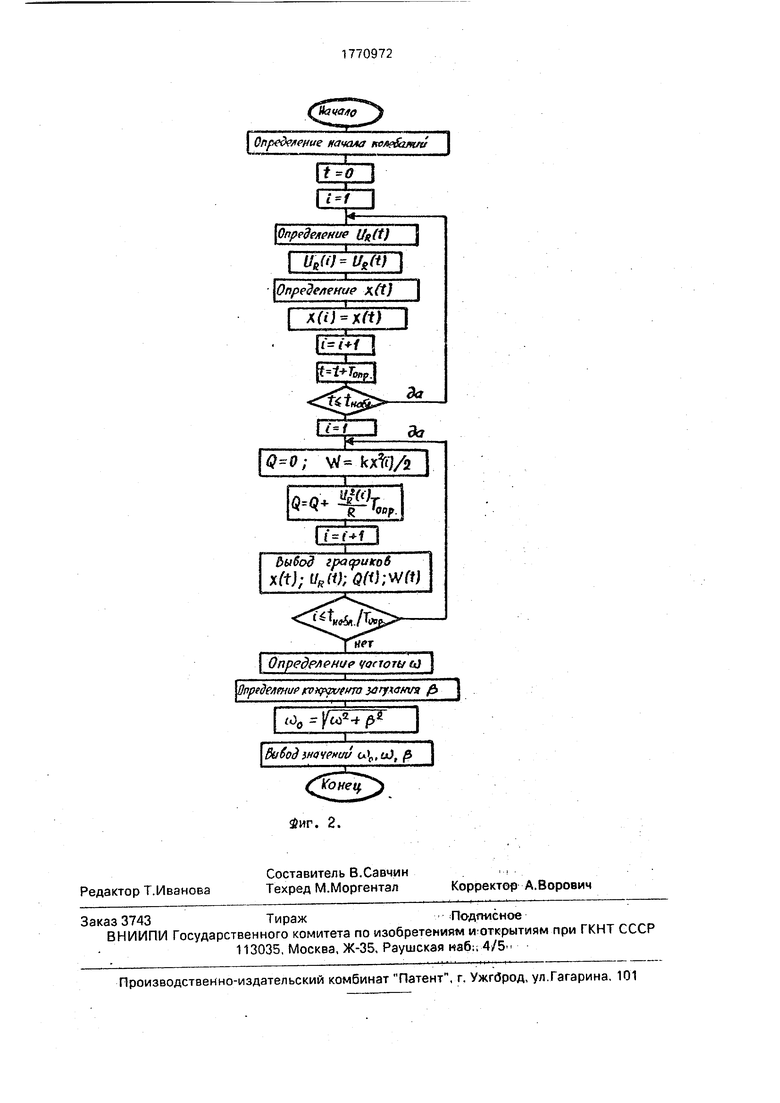
На фиг.1 представлена функциональная схема прибора; на фиг,2 представлен алгоритм работы вычислительного блока.
Прибор содержит -две цилиндрические спиральные пружины 1. постоянный магнит 2, электромагнитную катушку 3, электрический динамометр А, нагрузочное сопротивление 5, два аналого-цифровых преобразователя /АЦП/ 6 и 7, герметически закрытый баллон с воздухом 8, U-образный водяной манометр 9 и вычислительный блок 10 с индикацией /графическим дисплеем 11/. Нагрузочное сопротивление 5 выполнено в виде тонких нитей из, например, вольфрамовой проволоки, натянутых между токопроводящими траверсам, и помещено внутри баллона 8. Такая конструкция нагрузочного сопротивления обеспечивает наиболее эффективную передачу выделяемого проходящим по ней током тепла содержащемуся в баллоне воздуху.
Электрический динамометр 4 связан с одной из пружин 1 /например, верхней/, что обеспечивает измерение силы, деформирующей пружины.
Учитывая известное соотношение между силой, деформирующей пружины, и деформацией пружин /закон Гука/, можно показания электрического динамометра привести в соответствие со смещением колеблющегося тела /магнита/ пружинного маятника. Для этого коэффициент упругости пружин k можно определить независимым способом, например, деформируя пружины силой определенной величины, и измеряя при этом величину деформации пружин, т.е. смещение магнита от положения равновесия. Электрический динамометр 4 представляет собой устройство для измерения силы, состоящее из силового звена /упругого элемента/ и отсчетного устройства. В силовом звене динамометра измеряемое усилие преобразуется в деформацию. Отсчетное устройство состоит из датчика, преобразующего деформацию в электрический сигнал, и усилителя. В качестве датчика используются тензорезистив- ные решетки. Деформация силового звена динамометра приводит к деформации связанных с ним тензорезмстивных датчиков, в
результате чего разбалансировываются токи моста сопротивления, в который включены датчика. Этот сигнал после усиления с помощью АЦП б преобразуется в цифровой код, воспринимаемый вычислительным блоком 10, а АЦП 7 аналогично обеспечивает регистрацию падения напряжения на нагрузочном сопротивлении 5.
Для реализации поедложенного прибора в качестве вычислительного устройства
может быть использована любая из серийно выпускаемых микроЭВМ с языками высокого уровня, имеющая процессорный блок, оперативное запоминающее устройств, клавиатуру и устройство отображения информации.
Параметры колебательной системы /пружинного маятника/ целесообразно подбирать таким образом, чтобы обеспечивалась наглядность проводимого эксперимента. Так, например, период колебаний маятника Тк может быть выбран в пределах 0,1..,0,6 с, что обеспечивается при массе магнита 2 m 0,5...1,0 кг и коэффициенте упругости системы пружин k 10 ... 10 Н/м.
В этом случае при начальном смещении маятника от положения равновесия х0 3...5 см запасается энергия в котебательной системе порядка 1 Дж, что может обеспечить вполне ощутимое изменение давления воздуха в баллоне 8 объемом 1 .,,3 л при превращении этой энергии в тепло.
Прибор используют следующим образом. Перед началом демонстрации постоянный магнит смещают по вертикали на
величину х0 и фиксируют, например, спусковым устройством /на фиг. 1 не показано/. По сигналу управления от микро ЭВМ спусковое устройство освобождает постоянный магнит, что приводит к возбуждению колебаний пружинного маятника с периодом Тк, При этом АЦП 6 воспринимает сигнал электрического динамометра, соответствующий, по существу, смещению магнита x(t). Колебательные перемещения магнита в
катушке приводят к возникновению ЭДС индукции. При подключении к зажимам катушки индуктивности известного сопротивления R колебания -маятника будут затухающими с декрементом затухания, который зависит от величины R. АЦП 7 определяет значение падения напряжения на этом сопротивлении с периодом опроса Топр TK/N, где N - количество точек на периоде. Для достоверного отображения
затухающих колебаний N выбирается не менее 50.
При выборе периода колебаний маятника в указанных выше пределах такому условию удовлетворяют серийные отечественные АЦП,типа 1108ПВ1. 1113ПВ1, К572ПВ1 и др.
Измеренное значение IJR(t) отображается в виде графика на экране дисплея микро- ЭВМ. Одновременно на экране дисплея таким же образом отображается график изменения смещения магнита во времени х(г).
Для затухающих колебаний основная часть механической энергии, запасенной в маятнике, выделяется в виде тепловой энергии на сопротивлении R,- При этом происходит нагревание воздуха в баллоне 8, вследствие чего U-образный водяной манометр фиксирует изменение давления в баллоне. Таким образом, демонстрируется процесс превращения энергии.
Тепловая энергия может быть определена по формуле
QR(t)/
6т,
мента времени, для которых Up;(t| - 0. то 0) -:---. При известном значении о методом наименьших квадратов определяется коэффициент затухания f из системы линейных уравнений
NaSi S2
10
Si 8384 82 SA Ssy где Na - количество точек аппроксима15
ции.
NaNa
Si Intii 82 n Isincrft,: 1 1i 1
20
(Int,)-.
i - 1
25
№
S4 2 lnt i sin (in I i 1


| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОВЯЗКИЙ МАЯТНИК | 2005 |
|
RU2291546C1 |
| Ключевой радиопередатчик короткоимпульсных сверхширокополосных сигналов | 2020 |
|
RU2734939C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ ЯВЛЕНИЙ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2007 |
|
RU2380662C2 |
| Учебный прибор по физике для демонстрации незатухающих механических колебаний | 1987 |
|
SU1504669A1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2365910C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 2008 |
|
RU2377506C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГНОСТИЧЕСКИХ ПАРАМЕТРОВ РАЗРЯДА ЕМКОСТНЫХ СИСТЕМ ЗАЖИГАНИЯ | 2008 |
|
RU2394170C2 |
| Учебная установка для демонстрации автоколебаний | 1982 |
|
SU1048501A1 |
| Учебное пособие по механике | 1982 |
|
SU1067524A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СВОБОДНО ЗАТУХАЮЩИХ КОЛЕБАНИЙ КРУТИЛЬНОГО МАЯТНИКА | 2009 |
|
RU2435147C2 |
Сущность изобретения: устройство содержит спиральные пружины /1/. 1 постоянный магнит /2/. 1 электромагнитную катушку /3/, 1 электрический динамометр /4/, 1 нагрузочное сопротивление /5/. 2 аналого-цифровых преобразователя /6.7/. 1 герметически зарытый баллон /8/. 1 манометр /9/, 1 вычислительный блок /10/. 1 графический дисплей /11/. 2-46-10-11, /3,5/-7-10. 2 ил. ю Ч LO С 77 VI vi О Ч) XI ю
а потенциальная энергия маятника в любой момент времени выразится как
W
kx (J) 2
Интегрял /1/ может быть вычислен по любой формуле численного интегрирования, При использовании метод прямоугольников получим
N
.)
I опр
(3)
При достаточно большом времени наблюдения и малых потерях в катушке индуктивности и пружинном маятнике будет выполняться /приближенно/ равенство
QR(t)
kxg
t -t w
(4)
Формула /З/ может служить основой для демонстрации закона сохранения энергии. По окончании времени наблюдения определяются собственная частота колебаний (Do, частота затухающих колебаний ш и коэффициент затухания /3. Частота затухающих колебаний определяется по соседним моментам перехода через нуль напряжения UR(I). Если ti и t2 (t.ti) - два соседних моNa„Ma
85 Ј On Isinwtii)2: So - V yi:
i 1 i 1
30
35
40
,
87 2 yilnti; SB X Vilnisinwti i; i 1i 1
y, In H)R(ti) I,
ti - моменты времени, в котор ie с помощью АЦП определяется значения х(г) и UR(t). Система /5/ уравнений получена на основе аппроксимирующего еыра эния
In IL)R(t) l a0 f ailnt - aaln I sin an I
(6)
Выражение /5/ основывается на представлении затухающих колебании формулой
UR(T.) )sin an.. После решения системы /4/ пслучим
ш0 . (7)
Вычисленные значения . м, / выводятся на экран дисплея.
Алгоритм работы установки МОУ;НС описать следующим образом: включить микро- ЭВМ и загрузить в память программу опроса АЦП исбработш результат измерений, запустить загруженную прс-грамму
на выполнение Затем возбудить колебания постоянного магнита в катушке. Во время затухающих колебаний с помощью электрического динамометра с периодом опроса Гопр и АЦП измеряются смещения маятника x(t) и падение напряжения UR(T.) на сопротивлении R. Мгновенные значения потенциальной энергии маятника и тепловой энергии, выделенной на сопротивлении FJ, определяются по формулам /1/ и /2/;
По окончании времени наблюдения по формулам /S/-/7/ определяют собственную частоту колебаний аь, коэффициент затухания Д- Графики x(t), UR(T.), QR(T,), W(t) и полученные значения coo, a),fi выводятся на экран дисплея.
Преимущество изобретения по сравнению с известными заключается в повышении нагляднрсти демонстрации колебательного процесса и закона сохранения и превращения энергии колебаний пружинного маятника в электрические колебания с дальнейшим превращением в тепловую энергию, расходуемую на повышение внутренней энергии воздуха в баллоне и с-толнение работы по его расширению.
Формула изобретения
Прибор для демонстрации колебаний пружинного маятника, содержащий подпружиненный сверху и снизу постоянный магнит, расположенный внутри электромагнитной катушки, отличающийся тем, что, с целью расширения дидактических возможностей путем повышения наглядности демонстрации колебательного процесса, он снабжен аналого-цифровыми преобразователями, установленным в герметически закрытом баллоне с манометром нагрузочным сопротивлением, вычислительным блоком с индикацией и электрическим динамометром, механически связанным с расположенной сверху постоянного магнита пружиной, выход электрического динамометра через первый
аналого-цифровой преобразователь соединен с первым входом вычислительного блока, а выводы электромагнитной катушки и нагрузочного сопротивления соединены с входами второго аналого-цифрового преобразователя, выход которого подключен к второму входу вычислительного блока.
0npefatenue начала келе&шл/
liS
CEO
J±
0пределение l/g(t)
uK(fj t/x7fr
.i
0пре3еление x.(t)
JL
0; W kytt7/2J
Q-Q+ 44 R oop
графикой x(t);UKH);QM;WM
Определение чапоти fj J
QflpideAfHue гухрри(нто f j
дибодWQWHW ,o),
дсг
нет
| Лабораторные демонстрации по физике / Под ред | |||
| В.И.Ивероновой | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
