Изобретение относится к технике измерения неэлектрических величин, в частности к пьезоэлектрическим датчикам давления.
Известны пьезоэлектрические датчики давления, в которых воспринимаемое мембраной давление передается кварцевым пластинам и регистрируется электрический заряд на их рабочих гранях (см. например, Агейкин Д.И. Датчики контроля и регулирования. М., Машиностроение, 1965, с.618- 621).
Известны также измерители давления, содержащие два пьезорезонансных преобразователя, один из которых реагирует на давление и температуру, а другой служит только для компенсации температурного
влияния, для чего оба преобразователя включены в дифференциальную измерительную схему (см.например. Заявка Великобритании, N5 2089998, кл. G 01 L 9/08, 1982).
Наиболее близким по технической сущности к заявляемому устройству является устройство измерения давления, описанное в статье Пьезорезонансные датчики давления, авт. Л.В.Малейко, В.В.Малов и др.. ПСУ, 1984, № 9, с. 19-21 (прототип), это устройство описано также в книге: В В.Малов Пьезорезонансные датчики. Энергоатомиз- дат, 1989, с. 149. рис.5.11.
Указанное устройство представляет собой датчик давления, содержащий штуцер для подачи измеряемого давления, мембраvj VI 00 СЛ М
ю
ну с жестким центром, корпус и основание, образующие термокамеру, преобразователь усилия в частоту и дифференциальную схему измерения, причем преобразователь усилия в частоту выполнен в виде двух держателей с закрепленными в них двумя сплочу вствительны ми пьезорезонаторами, подключенными к дифференциальной схеме измерения, и один из пьезорезонаторов расположен на оси нагружения перпендикулярно плоскости мембраны и восприни- мает усилие от давления через жесткий центр мембраны, при этом держатель, в котором закреплен этот пьезорезонатор, выполнен с утоньшением в средней его части, а во втором держателе, выполненном в виде жесткой балки, консольно укреплен второй пьезорезонатор, выполняющий функции опорного, ненагруженного пьезорезонато- ра, применение которого позволяет при дифференциальном включении обоих пьезорезонаторов в схему измерения снизить температурную погрешность и уменьшить влияние временного старения рабочего (нагруженного) пьезорезонатора на показания датчика давления. Недостатками такого технического решения являются:
-недостаточная точность измерения, так как со временем возрастает погрешность измерения вследствие разной скорости старения пьезорезонаторов и элементов дифференциальной схемы измерения;
-низкая чувствительность на начальном участке характеристики датчика, хотя часто бывает крайне необходимо иметь у датчиков абсолютного давления повышенную чувствительность измерения в области малых значений давления.
Целью изобретения является повышение чувствительности на начальном участке диапазоне и точности измерений во всем диапазоне,
Цель достигается тем, что в устройстве для измерения давления, содержащем штуцер для подачи измеряемого давления, мембрану с жестким центром, термокамеру, образованную корпусом и основанием, преобразователь усилия в частоту и дифферен- циальную схему измерения, причем преобразователь усилия в частоту выполнен в виде двух держателей, в которых закреплены, соответственно, первый и второй пье- зорезонаторы, подключенные к дифференциальной схеме измерения, при этом первый пьезорезонатор расположен по оси нагружения перпендикулярно плоскости мембраны, согласно изобретению, второй держатель выполнен в виде гибкой балки, неподвижный конец которой соединен с основанием, подвижный конец прикреплен одной стороной к жесткому центру, а между второй его стороной и первым держателем выполнен зазор, причем второй
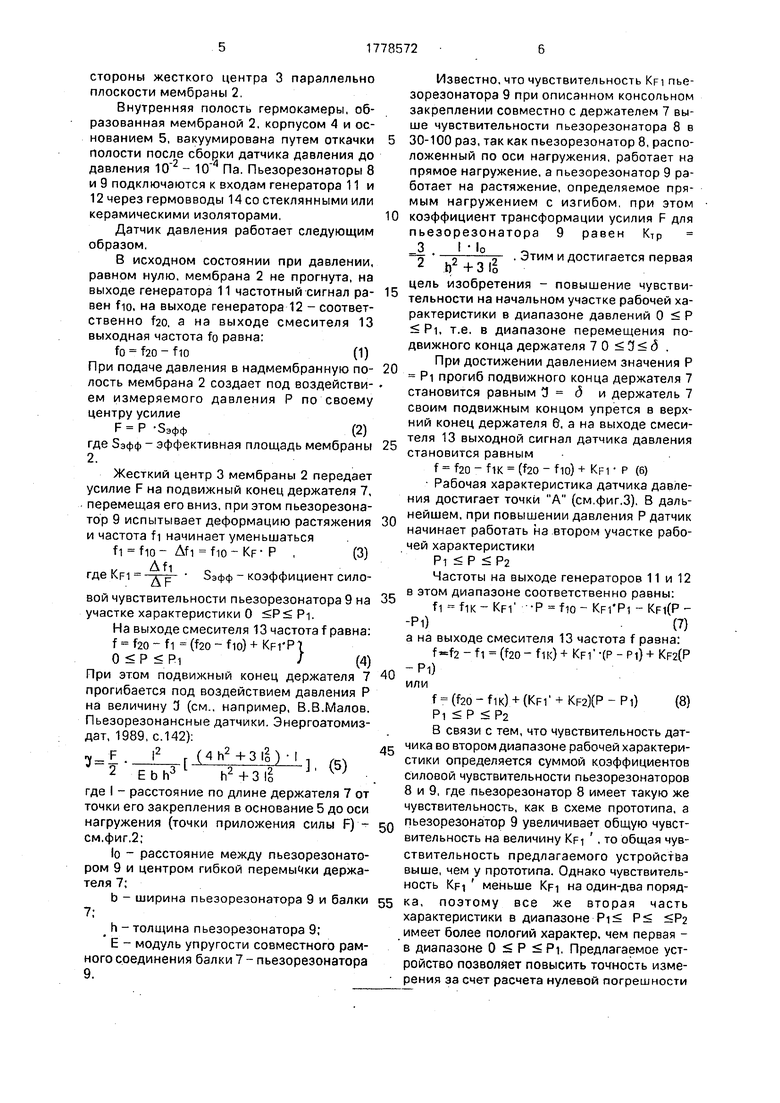
пьезорезонатор прикреплен к гибкой балке со стороны жесткого центра, параллельно оси мембраны, а пьезорезонаторы выполнены с различными частотами резонанса. На фиг.1 изображена структурная схема
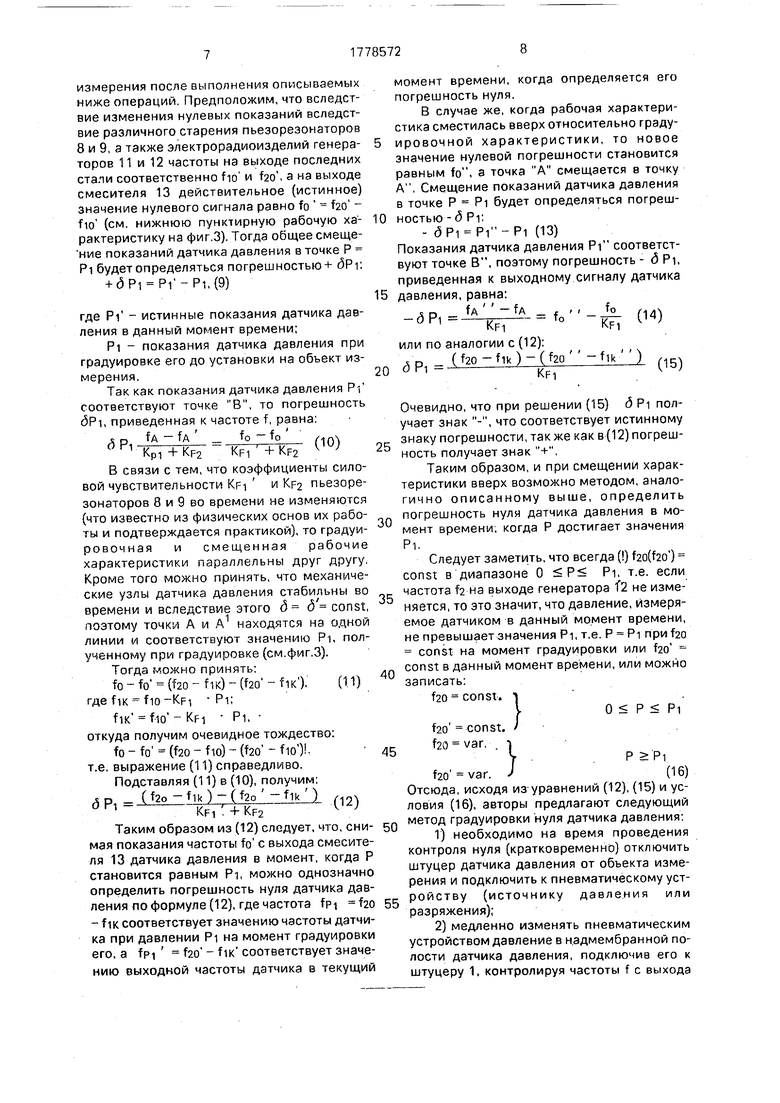
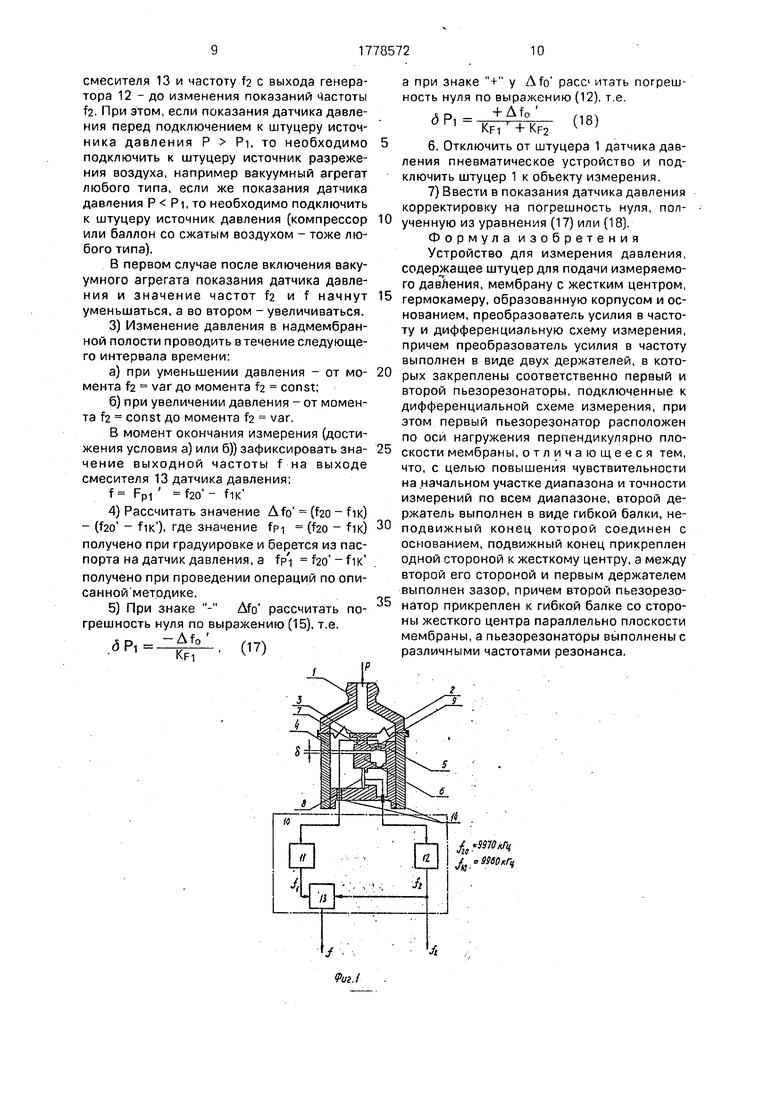
предлагаемого датчика давления, в разрезе; на фиг,2 представлен эскиз конструктивного выполнения второго держателя; на фиг.З представлена рабочая характеристика предлагаемого датчика давления.
Датчик давления включает в себя: штуцер 1 для подачи измеряемого давления, мембрану 2 с жестким центром 3, корпус 4 и основание 5, образующие термокамеру, преобразователь усилия в частоту, выполненный в виде двух держателей 6 и 7 с
закрепленными в них двумя силочувствительными пьезорезонаторами 8 и 9, один из
которых - 8 расположен по оси нагружения
перпендикулярно плоскости мембраны 2, и
дифференциальную схему измерения 10, которая, например, может быть выполнена в виде двух генераторов 11 и 12, к которым подключены соответственно пьезорезонаторы 9 и 8, выходы генераторов 11 и 12
подключены к входам смесителя 13, с выхода которого снимается выходной сигнал f датчика давления. Одновременно имеется возможность снятия при контроле нуля показаний с генератора 12 выходной его частоты fa. Второй держатель 7 выполнен в виде гибкой балки, например,в его средней части имеется утоныиение, позволяющее подвижному концу держателя 7 перемещаться вниз вдоль оси нагружения под дейстанем силы от давления Р, которая передается на держатель 7 через жесткий центр 3. Неподвижный конец держателя 7 жестко соединен с основанием 5.
Подвижный конец держателя 7 верхней стороной соединен с жестким центром 3, а между его нижней стороной и держателем 6 имеется зазор б . Частота резонанса ho пьезорезонатора 8 больше частоты резонатора fio пьезорезонатора 9 на известную величину fo, т.е. fo f20 - fio. Величина fo всегда должна быть положительной, с целью исключения двузначности показаний вследствие возможного излома характеристики при достижении нежелательного ус ловия f20 :Јfio, то есть в датчике предлагается выполнение условия fo 0. Как следует из фиг.1, пьезорезонатор 9 прикреплен к гибкой балке (держателю 7) со
стороны жесткого центра 3 параллельно плоскости мембраны 2.
Внутренняя полость термокамеры, образованная мембраной 2, корпусом 4 и основанием 5, вакуумирована путем откачки полости после сборки датчика давления до давления - Па. Пьезорезонаторы 8 и 9 подключаются к входам генератора 11 и 12 через гермовводы 14 со стеклянными или керамическими изоляторами,
Датчик давления работает следующим образом.
В исходном состоянии при давлении, равном нулю, мембрана 2 не прогнута, на выходе генератора 11 частотный сигнал ра- вен fio, на выходе генератора 12 - соответственно f20, а на выходе смесителя 13 выходная частота fo равна:
fo fao - f 10(1)
При подаче давления в надмембранную по- лость мембрана 2 создает под воздействи- ем измеряемого давления Р по своему центру усилие
F Р -Зэфф(2)
где Зэфф - эффективная площадь мембраны 2.
Жесткий центр 3 мембраны 2 передает усилие F на подвижный конец держателя 7, перемещая его вниз, при этом пьезорезона- тор 9 испытывает деформацию растяжения и частота fi начинает уменьшаться
f 1 f ю - Af 1 f ю - Кр Р ,(3)
i/ Afi оj-ж
где KFI д p Ьэфф - коэффициент силовой чувствительности пьезорезонатора 9 на участке характеристики 0 .
На выходе смесителя 13 частота f равна: f f20 - fi (fao - fio) + KprPl 0 P Pi/(4)
При этом подвижный конец держателя 7 прогибается под воздействием давления Р на величину 3 (см., например, В.В.Малов. Пьезорезонансные датчики. Энергоатомиз- дат, 1989, с.142):
I
( 4 h2 + 3 15 ) h2+3l§
3. (5)
Y- F
j
2 Ebh
где I - расстояние по длине держателя 7 от точки его закрепления в основание 5 до оси нагружения (точки приложения силы F) - см.фиг.2;
lo - расстояние между пьезорезонато- ром 9 и центром гибкой перемычки держателя 7;
b - ширина пьезорезонатора 9 и балки 7;
h - толщина пьезорезонатора 9;
Е - модуль упругости совместного рамного соединения балки 7 - пьезорезонатора 9.
5 0
5
0
5
0
5
0
5
0
5
Известно, что чувствительность KFI пьезорезонатора 9 при описанном консольном закреплении совместно с держателем 7 выше чувствительности пьезорезонатора 8 в 30-100 раз, так как пьезорезонатор 8, расположенный по оси нагружения, работает на прямое нагружение, а пьезорезонатор 9 работает на растяжение, определяемое прямым нагружением с изгибом, при этом коэффициент трансформации усилия F для пьезорезонатора 9 равен Ктр
3 I 10 о Этим и достигается первая
2 I)2 + 3 §
цель изобретения - повышение чувствительности на начальном участке рабочей характеристики в диапазоне давлений 0 Р PI, т.е. в диапазоне перемещения подвижного конца держателя 7 0 3 д .
При достижении давлением значения Р PI прогиб подвижного конца держателя 7 становится равным 3 д и держатель 7 своим подвижным концом упрется в верхний конец держателя 6, а на выходе смесителя 13 выходной сигнал датчика давления становится равным
f fao - f IK (fzo - fio) + KFI P (6) Рабочая характеристика датчика давления достигает точки А (см.фиг.3). В дальнейшем, при повышении давления Р датчик начинает работать на втором участке рабочей характеристики
Pi Р Р2
Частоты на выходе генераторов 11 и 12 в этом диапазоне соответственно равны:
fi fiK - KFI --P fio - Kpi Pi - KFi(P -Pi)(7)
а на выходе смесителя 13 частота f разна:
f-f2 - fi (f20 - fiK) + KFI ЧР - PI) + KF2(P -PO или
f (f20-flK) + (KFl + KF2)(P-Pl)(8)
Pi P P2
В связи с тем, что чувствительность датчика во втором диапазоне рабочей характеристики определяется суммой коэффициентов силовой чувствительности пьезорезонаторов 8 и 9, где пьезорезонатор 8 имеет такую же чувствительность, как в схеме прототипа, а пьезорезонатор 9 увеличивает общую чувствительность на величину KFI , то общая чувствительность предлагаемого устройства выше, чем у прототипа. Однако чувствительность KFI меньше KFI на один-два порядка, поэтому все же вторая часть характеристики в диапазоне Pi P Ра имеет более пологий характер, чем первая - в диапазоне 0 Р Pi, Предлагаемое устройство позволяет повысить точность измерения за счет расчета нулевой погрешности
измерения после выполнения описываемых ниже операций. Предположим, что вследствие изменения нулевых показаний вследствие различного старения пьезорезонаторов 8 и 9, а также электрорадиоизделий генераторов 11 и 12 частоты на выходе последних стали соответственно fю и тзо , а на выходе смесителя 13 действительное (истинное) значение нулевого сигнала равно fo - f2o - fio (см. нижнюю пунктирную рабочую характеристику на фиг.З). Тогда общее смеще- ние показаний датчика давления в точке Р Pi будет определяться погрешностью 5Pi: + 5Pi Pi -Pi.(9)
где Pi - истинные показания датчика давления в данный момент времени;
Pi - показания датчика давления при градуировке его до установки на объект измерения.
Так как показания датчика давления Р-Г соответствуют точке В, то погрешность dPi, приведенная к частоте f, равна:
f А - f А f0 - f о
5Pi
(10)
KP1 + KF2 KFI+KF В связи с тем, что коэффициенты силовой чувствительности KFI и KF2 пьезорезонаторов 8 и 9 во времени не изменяются {что известно из физических основ их работы и подтверждается практикой), то градуи- ровочная и смещенная рабочие характеристики параллельны друг другу. Кроме того можно принять, что механические узлы датчика давления стабильны во времени и вследствие этого д д const, поэтому точки А и А находятся на одной линии и соответствуют значению Pi, полученному при градуировке (см.фиг.З). Тогда можно принять:
fo-fo (f20-flK)-(f20 -flK ),(11)
где fiK -fio-Kpi Pi;
fiK fio -Kpi PL откуда получим очевидное тождество:
fo - fo (fao - fio) - (fao - fio% т.е. выражение (11) справедливо.
Подставляя (11) в (10), получим: л р, - ( 2о - f ik ) - ( f2o - f 1k ) /19N ° nKpi:+KF2(
Таким образом из (12) следует, что, снимая показания частоты fo с выхода смесителя 13 датчика давления в момент, когда Р становится равным Pi, можно однозначно определить погрешность нуля датчика давления по формуле (12), где частота fpi T20 - fiK соответствует значению частоты датчика при давлении Pi на момент градуировки его, a fpi fao - f ш соответствует значению выходной частоты датчика в текущий
момент времени, когда определяется его погрешность нуля.
В случае же, когда рабочая характеристика сместилась вверх относительно градуировочной характеристики, то новое значение нулевой погрешности становится равным fo, а точка А смещается в точку А, Смещение показаний датчика давления в точке Р Pi будет определяться погрешностью -д Рц
- dPi (13)
Показания датчика давления Pi соответствуют точке В, поэтому погрешность - д Pi, приведенная к выходному сигналу датчика
давления, равна:
0«
или по аналогии с (12):
Л Р, - (f2Q -fm)-(f2o -fik )
° П KF1
(15)
5
0
5
5
5
Очевидно, что при решении (15) д Pi получает знак -, что соответствует истинному знаку погрешности, также как в(12) погрешность получает знак +.
Таким образом, и при смещении характеристики вверх возможно методом, аналогично описанному выше, определить погрешность нуля датчика давления в момент времени, когда Р достигает значения PL
Следует заметить, что всегда () f2o(f2o ) const в диапазоне 0 Р Pi, т.е. если частота f2 на выходе генератора f2 не изменяется, то это значит, что давление, измеряемое датчиком в данный момент времени, не превышает значения PI, т.е. Р PI при f20 const на момент градуировки или f2o - п const в данный момент времени, или можно записать:
f20 const. 1
V0 Р Pi
f20 Const. /
f20 var. -I
P Pi
f2o var. J(16)
Отсюда, исходя из уравнений (12), (15) и условия (16), авторы предлагают следующий „ метод градуировки нуля датчика давления:
1)необходимо на время проведения контроля нуля (кратковременно) отключить штуцер датчика давления от объекта измерения и подключить к пневматическому устройству (источнику давления или разряжения);
2)медленно изменять пневматическим устройством давление в надмембранной полости датчика давления, подключив его к штуцеру 1, контролируя частоты f с выхода
смесителя 13 и частоту h с выхода генератора 12 - до изменения показаний частоты f2. При этом, если показания датчика давления перед подключением к штуцеру источника давления Р Pi, то необходимо подключить к штуцеру источник разрежения воздуха, например вакуумный агрегат любого типа, если же показания датчика давления Р Pi, то необходимо подключить к штуцеру источник давления (компрессор или баллон со сжатым воздухом - тоже любого типа).
В первом случае после включения вакуумного агрегата показания датчика давления и значение частот f2 и f начнут уменьшаться, а во втором - увеличиваться.
3)Изменение давления в надмембран- ной полости проводить в течение следующего интервала времени:
а)при уменьшении давления - от момента f2 var до момента fa const;
б)при увеличении давления - от момента fa const до момента f2 var.
В момент окончания измерения (достижения условия а) или б)) зафиксировать зна- чение выходной частоты f на выходе смесителя 13 датчика давления:
f Fp1 f2o - fiK
4)Рассчитать значение Afo (fao - fn) - (f2o - fiK1), где значение (120 - fn) получено при градуировке и берется из паспорта на датчик давления, а fp i f2o -fiK получено при проведении операций по опи- санной методике.
5)При знаке - Afo рассчитать погрешность нуля по выражению (15), т.е.
Af° (17)
Р
5
0
5
0
0
5
а при знаке + у Afo pace1 итать погрешность нуля по выражению (12), т.е.
« -luffi 18
6. Отключить от штуцера 1 датчика давления пневматическое устройство и подключить штуцер 1 к объекту измерения.
7) Ввести в показания датчика давления корректировку на погрешность нуля, полученную из уравнения (17) или (18).
Формула изобретения
Устройство для измерения давления, содержащее штуцер для подачи измеряемого давления, мембрану с жестким центром, термокамеру, образованную корпусом и основанием, преобразователь усилия в частоту и дифференциальную схему измерения, причем преобразователь усилия в частоту выполнен в виде двух держателей, в которых закреплены соответственно первый и второй пьезорезонаторы, подключенные к дифференциальной схеме измерения, при этом первый пьезорезонатор расположен по оси нагружения перпендикулярно плоскости мембраны, отличающееся тем, что, с целью повышения чувствительности на начальном участке диапазона и точности измерений по всем диапазоне, второй держатель выполнен в виде гибкой балки, неподвижный конец которой соединен с основанием, подвижный конец прикреплен одной стороной к жесткому центру, а между второй его стороной и первым держателем выполнен зазор, причем второй пьезорезонатор прикреплен к гибкой балке со стороны жесткого центра параллельно плоскости мембраны, а пьезорезонаторы выполнены с различными частотами резонанса.
Sa sm ni
fc-МОкГц
зЈ
X X. ч , . , хи х xi
к х ч 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения давления | 1988 |
|
SU1619081A1 |
| Устройство для измерения разности давлений | 1979 |
|
SU775640A1 |
| Пьезорезонансный датчик давления | 1987 |
|
SU1527528A1 |
| Пьезорезонансный датчик давления | 1986 |
|
SU1326917A1 |
| Способ симметрирования двухпроводного фидера | 1989 |
|
SU1709439A1 |
| Пьезорезонансный датчик давления | 1988 |
|
SU1712803A1 |
| ПЬЕЗОРЕЗОНАНСНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ | 2004 |
|
RU2282837C2 |
| Датчик давления | 1982 |
|
SU1065702A1 |
| Датчик давления | 1977 |
|
SU636493A2 |
| Пьезорезонансный датчик давления | 1988 |
|
SU1553858A1 |
Использование: в технике измерения давления пьезорезонансными датчиками, преимущественно без демонтажа датчика с объекта. Цель - повышение чувствительности на начальном участке диапазона и точности измерений во всем диапазоне. Сущность изобретения: устройство содержит штуцер для подачи измеряемого давления, мембрану с жестким центром, корпус и основание, образующие термокамеру, преобразователь усилия в частоту в виде двух держателей с закрепленными в них двумя силочувствительными пьезорезонаторами, один из которых расположен по оси нагру- жения перпендикулярно плоскости мембраны, и дифференциальную схему измерения. Отличием устройства является выполнение второго держателя в виде гибкой балки, неподвижный конец которой соединен с основанием, подвижный конец прикреплен одной стороной к жесткому центру, а между второй его стороной и первым держателем выполнен зазор, второй пьезорезонатор прикреплен к гибкой балке со стороны жесткого центра параллельно плоскости мембраны, а пьезорезонаторы выполнены с различными частотами резонанса. Положительный эффект: повышение чувствительности и точности измерений, защита от перегрузок. 3 ил. (Л с
JscTJlk
JaKJs Jl6,
Pt
ft P Па
Редактор
Фиг. 3
Составитель В.Морозов
Техред М МоргенталКорректор М.Максимишинец
Фиг.2.
ft P Па
| Датчик давления | 1982 |
|
SU1065702A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Малое В,В | |||
| Пьезорезонансные датчики | |||
| М., 1989, с.149 рис.5.11. | |||
