Изобретение относится к области электротехники, в частности к преобразованию и распределению электроэнергии и может быть использовано в сетях, где требуется стабилизация напряжения при резкопеременной нагрузке, а также в сельскохозяйственных сетях.
Известно устройство для регулирования напряжения и компенсации реактивной мощности, состоящее из последовательно включенных емкости и линейной индуктивности, шунтированных биполярными группами тиристоров. Данное устройство
позволяет регулировать напряжение на трансформаторных подстанциях без устройств РПН, вместе с тем наличие индуктивного элемента в цепи питания снижает эффективность работы продольной компенсации.
Известна регулируемая установка продольной емкостной компенсации, содержа- : щая секционированную батарею конденсаторов, управляемую по параметру тока в линии, так называемое встречное регулирование. Установка позволяет повышать качество напряжения на зажимах
VI
оо
О СЛ О
электропотребителей, удаленных от места включения установки продольной компенсации (УПК), однако в ней отсутствует возможность корректировать добавку напряжения УПК в зависимости от уровня входного напряжения и угла сдвига между векторами напряжения и тока в линии, что снижает .эффективность встречного регулирования 1й вi к.онечнрм счете отрицательно сказывается на качестве напряжения на заf Т ,., ц : -i st ЈЈ 4 ;.7 Г
жимах потребителей.
Известна таЬйУ регулируемая установка продольной емкостной компенсации, содержащая секционированную конденсаторную батарею (КБ), управляемую по парамет- ру отклонения напряжения на .входе установки, отклонения тока и угла сдвига фаз между током и напряжением. Данное устройство по своей технической сущности ближе всех к предлагаемому и принято за прототип. Установка позволяет повышать качество напряжения на зажимах электроприемников за счет коррекции входного на- пряжения и угла сдвига фаз между напряжением и током в линии. Однако в ней отсутствует возможность корректировать напряжение в зависимости от величин и угла сдвига между фазными напряжениями, что в условиях несимметричной нагрузки отрицательно сказывается на качестве напряжения на зажимах у потребителей.
Цель изобретения - симметрирование напряжения на зажимах удаленных потребителей и снижение потерь мощности за счет исключения протекания токов обрат- ной и нулевой последовательности в элементах сети.
Поставленная цель достигается тем, что фазные или линейные напряжения и токи в сети раскладывают на симметричные составляющие прямой, обратной и нулевой последовательности путем определения углов между векторами тройки несимметричных составляющих напряжений и токов и нахождения проекции векторов на оси комплексной плоскости, определяют отклонения напряжения и коэффициенты обратной и нулевой последовательности напряжений на зажимах удаленных потребителей и при положительном знаке отклонения напряжения уменьшают емкостное сопротивление установки продольной компенсации в фазе с наибольшим отклонением, а при отрицательном знаке отклонения напряжения увеличивают емкостное сопротивление в фазе с наибольшим по модулю отклонением напряжения на зажимах удаленных потребителей с предварительным определением параметров нового режима работы сети.
Изобретение поясняется фиг. 1-6.
I. Сети с глухозаземленной нейтралью.
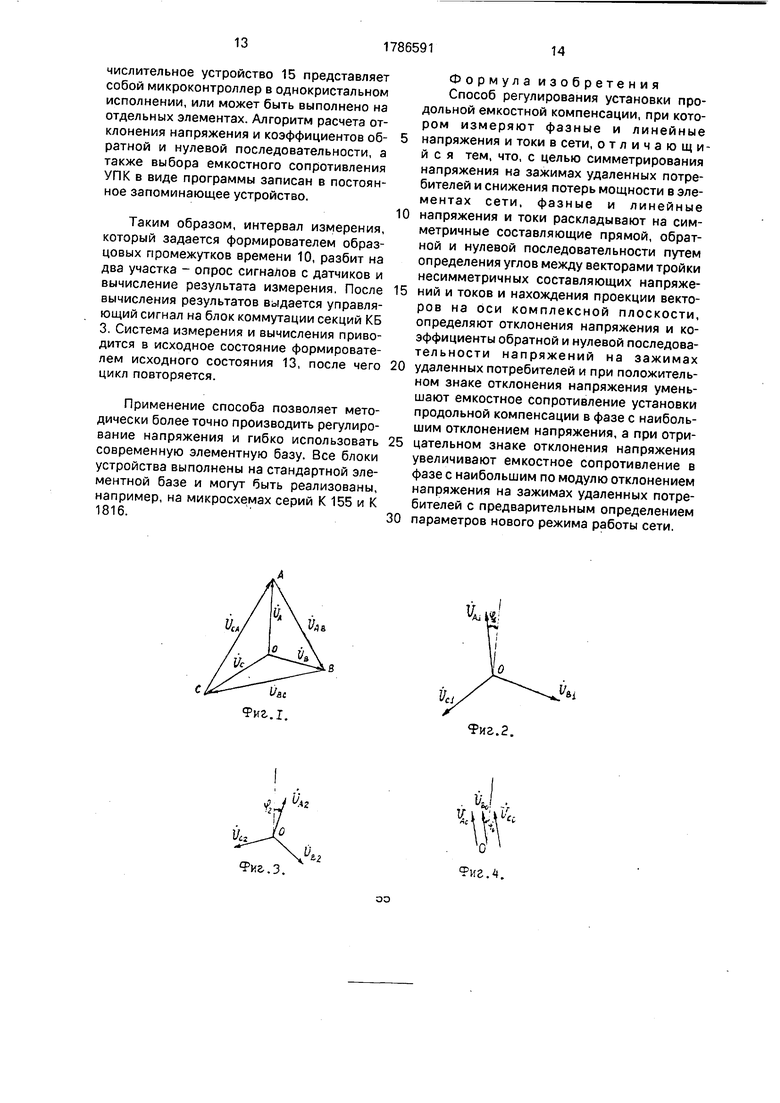
С датчиков напряжений снимают значения фазных и линейных напряжений, которые векторно находятся во взаимоотношении, показанном на фиг. 1.
Векторы напряжений UA, UB, Uc в общем случае образуют несимметричную тройку векторов, которая может быть разложена на три симметричных составляющих: прямой, обратной и нулевой последовательности (фиг. 2, 3, 4).
Вектор UA совмещают с положительным направлением действительной оси комплексной плоскости. Потрем скалярным
величинам UA, UB, Uc, используя теорему косинусов, определяют угол между векторами UA и Uв АВ)
РАВ () (1.1)
Аналогичным образом находим угол между векторами UA и Uc
AC-arcco :). 0.2)
Угол между векторами UB и Uc можно определить из выражения
рве - 360° -рдв -/ОАС.(1.3) Используя полученные данные, можно
определить проекции векторов UA, UB, Uc на комплексную плоскость
45
N
Ri ReUA UA MI |MUA ф R2 РеОв -Us -cos(180 -рдв)
50M2 lMUB -UB Sin(180-pAB)
55
R3 ReUc -Uc- cos(180-pAc) Мз 1мОс Uc -sin(180 -РАС)
Длину отрезка ВС находят из выражения
ВС | V(XB-Xc)2-l-(YB-Yc)2, (1.5)
где
Хв РеПв R2, Хс ReUc R3,
YB IwUe M2, Yc iMUc Мз.
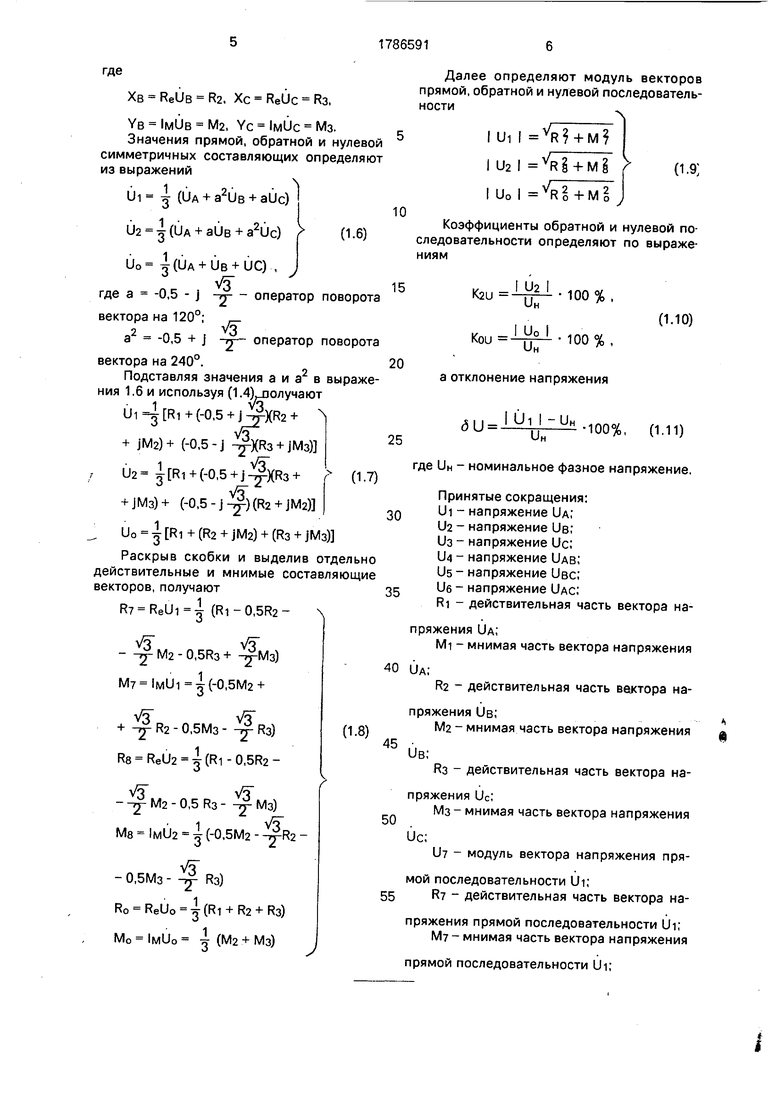
Значения прямой, обратной и нулевой симметричных составляющих определяют из выражений
Ui 3- (Од + a2UB + aUc)
П2 (Од + аОв + a2Uc) 1
(1.6)
u0 (UA + UB + UQ .,
е а -0,5 - j -я- - оператор поворота ектора на 120°;
уо
а -0,5 + j -и-- оператор поворота
ектора на 240°.20
Подставляя значения а и а2 в выражеия 1,6 и используя (1.4).получают
(-0,5 +
+ jM2)+ (-0,5-j rXR3 + jM3)
U2 (-0,5+j-7 XR3 + f (1.7)
+ JM3)+ (-0,5-j-y-)(R2 + JM2) I
U0 -| Ri + (R2 + JM2) + (Rs + JM3)
Раскрыв скобки и выделив отдельно ействительные и мнимые составляющие екторов, получают
R7 (R1-0.5R2-
- -%- М2 - 0,5R3 + )
(-0,5M2 +
VTVT
+ - R2 - 0,5Мз - -Ј Rs) Re ReU2 - 5 (Ri - 0,5R2
- M2 - 0,5 R3 - -y- M3)
M8 lwU2 (-0,5M2 -
25
30
35
40
/1
45
50
-0,5МзV Т
Яз)
Ro ReU0 -j (Ri + R2 + Rs)
M0 lMUo I (М2.+ Мз)
;
Далее определяют модуль векторов прямой, обратной и нулевой последовательности
I Ui I VR + М I U2 I VR § + М §
(1.9;
I U0 I R о + М о
10
Коэффициенты обратной и нулевой последовательности определяют по выражениям
100%
(1.Ю)
10° %
а отклонение напряжения
25
dU IUi I-UH ,m% (111)
UH
где UH - номинальное фазное напряжение.
Принятые сокращения: Ui - напряжение UA; U2 - напряжение UB; Us - напряжение Uc; U4 - напряжение UAB; Us - напряжение UBC; Ue - напряжение UAC; Ri - действительная часть вектора напряжения UA;
Mi - мнимая часть вектора напряжения
40 UA;
R2 - действительная часть вектора напряжения UB, - мнимая часть вектора напряжения
45 UB;
Яз - действительная часть вектора на
пряжения Uc,
Мз - мнимая часть вектора напряжения
Uc;
U - модуль вектора напряжения прямой последовательности id;
R - действительная часть вектора напряжения прямой последовательности Ui;
М - мнимая часть вектора напряжения
прямой последовательности Ui;
Do - модуль вектора напряжения обратной последовательности U2;
RS - действительная часть вектора напряжения обратной последовательности
U2;
Ms - мнимая часть вектора напряжения
обратной последовательности Ua;
Uo модуль вектора напряжения нуле-
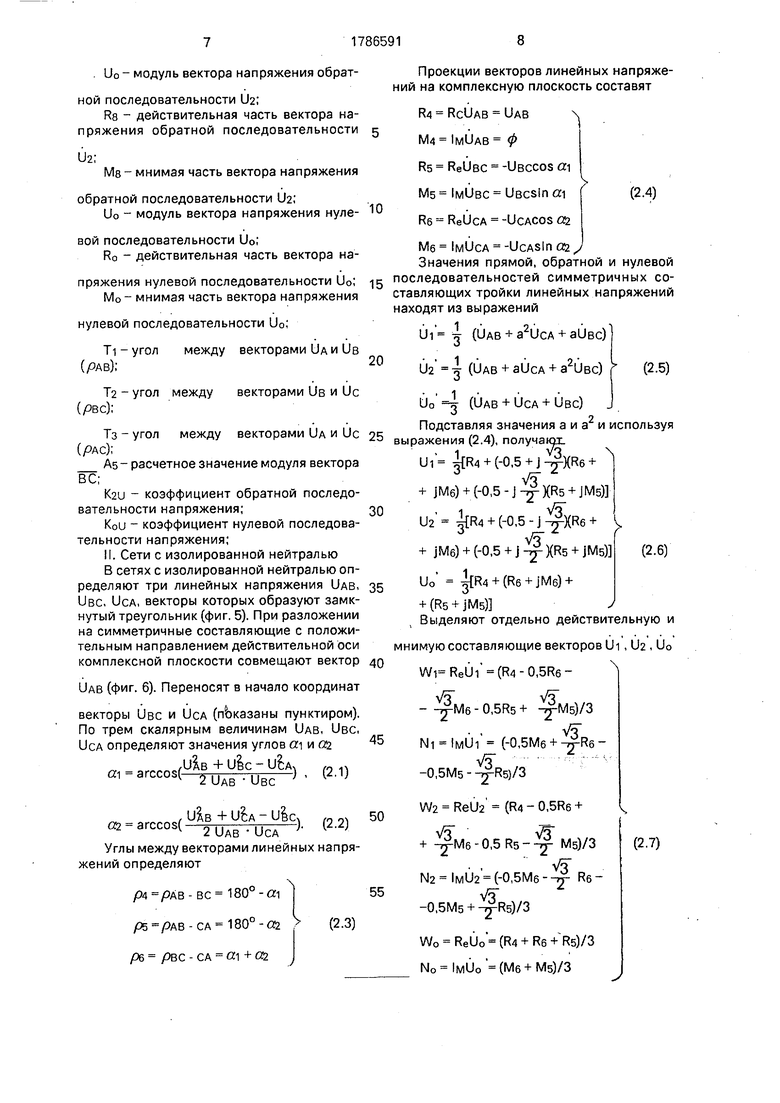
Проекции векторов линейных напряжений на комплексную плоскость составят
R4 RCUAB UAB
М4 IMUAB ф
RS ReUsc -UBCCOS a
Мб 1мОвс Uecsinai(2.4)
R6 ReUCA -UCACOS Ol

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для НЕПРЕРЫВНОГО КОНТРОЛЯ состояния | 1973 |
|
SU370550A1 |
| Способ управления трехфазным преобразователем частоты | 1987 |
|
SU1598080A1 |
| Способ измерения симметричных составляющих напряжений в трёхфазных сетях | 2015 |
|
RU2628663C2 |
| НЕРЕЗОНИРУЮЩИЙ ТРАНСФОРМАТОР НАПРЯЖЕНИЯ | 1997 |
|
RU2145131C1 |
| ПРЕОБРАЗОВАТЕЛЬ ТРЕХФАЗНОГО ПЕРЕМЕННОГО НАПРЯЖЕНИЯ В ПОСТОЯННОЕ С ПРОМЕЖУТОЧНЫМ УМНОЖЕНИЕМ ЧАСТОТЫ (ВАРИАНТЫ) | 1999 |
|
RU2159003C1 |
| СПОСОБ ИЗМЕРЕНИЯ МГНОВЕННОЙ РЕАКТИВНОЙ МОЩНОСТИ ТРЕХФАЗНОЙ СЕТИ | 2016 |
|
RU2644034C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО МЕСТА КОРОТКОГО ЗАМЫКАНИЯ | 2010 |
|
RU2468378C2 |
| АКТИВНЫЙ ФИЛЬТР ВЫСШИХ ГАРМОНИК ТОКОВ ТРЕХФАЗНОЙ СЕТИ | 2017 |
|
RU2667479C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОХОДНЫХ ИЗОЛЯТОРОВ КОНДЕНСАТОРА ДЛЯ ТРЕХФАЗНОЙ СЕТИ ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2645715C2 |
| Способ определения параметров схемы замещения трансформаторов «звезда/звезда-с-нулем» для построения цифровых моделей распределительных сетей | 2022 |
|
RU2794695C1 |

Назначение: изобретение относится к области электротехники, в частности к преобразованию и распределению электроэнергии, и может быть использовано в сетях, где требуется стабилизация напряжения при резкопеременной нагрузке, а также в сельскохозяйственных сетях. Сущность изобретения: фазное или линейные напряжения и токи раскладывают на симметричные составляющие прямой, обратной и нулевой последовательностей путем определения углов между векторами тройки несимметричных составляющих напряжений и токов и нахождения проекций векторов на оси комплексной плоскости, определяют отклонения напряжения и коэффициенты обратной и нулевой последова- тельности напряжений на зажимах удаленных потребителей и при положительном знаке отклонения напряжения уменьшают емкостное сопротивление установки продольной компенсации в фазе с наибольшим отклонением напряжения, а при отрицательном знаке отклонения напряжения увеличивают емкостное сопротивление в фазе с наибольшим по модулю отклонением напряжения на зажимах удаленных потребителей с предварительным определением параметров нового режима работы сети. 7 ил.
вой последовательности UoJ
Ro - действительная часть вектора наМе м11сА -UcASln Oi ; Значения прямой, обратной и нулевой пряжения нулевой последовательности 1)0; 45 послеД°вательностей симметричных со- М0 - мнимая часть вектора напряжения ставляющих тройки линейных напряжений
находят из выражений
нулевой последовательности U0; . 1 „. - . ,
Ui- 5 (UAB + a2UcA + aUBc) TI - угол между векторами UA и UB
(ЯАВ);
Т2 угол между векторами UB и Uc (рве);
20
1
U2 -5 (UAB + aUcA + anJec)
1
(2.5)
U0 -g- (UAB + UCA + UBC)
Подставляя значения а и
Тз-угол между векторами UA и Uc 25пл,™п™ а /у s выражения (2.4), получаю.
As- расчетное значение модуля вектора
Ui {R4 + (-0,5 + j
VT + jM6) + (-0,5-J-j-XR5 +
U2 {R4 + (-0, + jM6) + (-0,5 + +
1,
ВС;
Каи - коэффициент обратной последовательности напряжения;30
Кои - коэффициент нулевой последовательности напряжения;
II. Сети с изолированной нейтралью
В сетях с изолированной нейтралью определяют три линейных напряжения UAB, 35 ° з + 6 + + UBC, UCA, векторы которых образуют замк-+(R5 + jMsTl нутый треугольник (фиг, 5). При разложении на симметричные составляющие с положительным направлением действительной оси комплексной плоскости совмещают вектор 40
UAB (фиг. 6). Переносят в начало координат
векторы UBC и UCA (пЬказаны пунктиром). По трем скалярным величинам UAB, UBC, UCA определяют значения углов щ и с®. 5
,UAB + Ulc - UcA
Выделяют отдельно дей мнимую составляющие векто Wi ReUi (R4-0,5Re«1
..и. (21)
vTV
- - 0,5Rs + -у-Мб)
Ni-lMUi - (-0,5Мб + v
у-- ......
-0,5М5 - -j-Rs)/3
«-««(
Углы между векторами линейных напряжений определяют
Р4 / АВ-ВС 180°-«1 /05 /5АВ-СА 180° -02 Р& РВС - СА «1 + CCZ
(2.3)
Ui- 5 (UAB + a2UcA + aUBc)
1
U2 -5 (UAB + aUcA + anJec)
(2.5)
1
U0 -g- (UAB + UCA + UBC)
Подставляя значения а и а2 и используя
пл,™п™ а ажения (2.4), получаю.
пл,™п™ а ажения (2.4), получаю.
Ui {R4 + (-0,5 + j + N
VT + jM6) + (-0,5-J-j-XR5 + jM5)
U2 {R4 + (-0, V + jM6) + (-0,5 + + jM5)
° з + 6 + + +(R5 + jMsTl
1,
з jM
° з + 6 + + +(R5 + jMsTl
Выделяют отдельно действительную и мнимую составляющие векторов Ui, 62 , U0 Wi ReUi (R4-0,5Re
5
0
5
vTV
- - 0,5Rs + -у-Мб)/3
Ni-lMUi - (-0,5Мб + v-Reу-- ...... . „.-.. j
-0,5М5 - -j-Rs)/3
W2 ReU2 (R4 - 0,5Re +
VTv + ,5R5-- M5)/3
V§
N2 lMU2 (-0, Rev
-0,5M5 + )/3
W0 Re00 (R4 + Re + Re)/3
N0 lMUo (M6+M5)/3
Ч
(2.7)
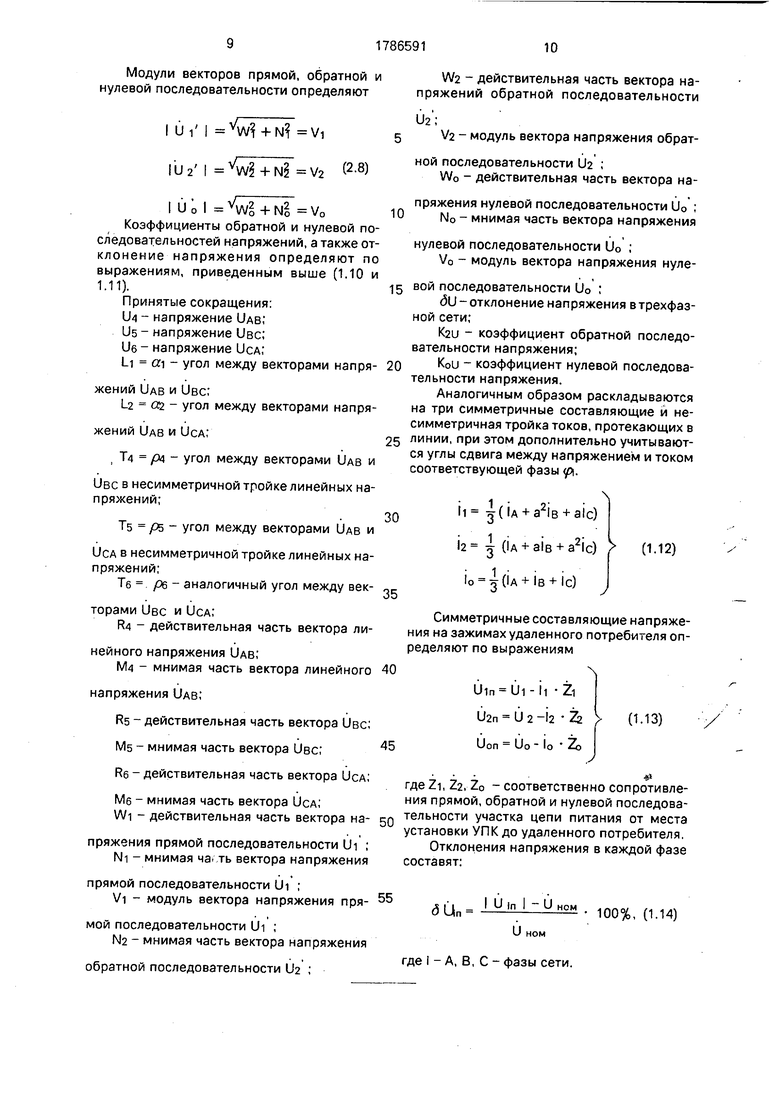
Модули векторов прямой, обратной - действительная часть вектора на- нулевой последовательности определяют пряжений обратной последовательности
иг ;
I U i I W + N Vi5 V2 - модуль вектора напряжения обратV 2---2 (1 81 НОЙ послеД°вательности 2 ;
IU 2 W2 + N2 V2 I Wo - действительная часть вектора на. . у12 пряжения нулевой последовательности Uo ;
I и о I W0 + No V010 NO - мнимая часть вектора напряжения Коэффициенты обратной и нулевой последовательностей напряжений, а также от- нулевой последовательности Uo ; клонение напряжения определяют по V0 - модуль вектора напряжения нулевыражениям, приведенным выше (1.10 и . 1 11) 15 вой последовательности Uo ;
Принятые сокращения:& отклонение напряжения в трехфаз- U4 - напряжение UAB; ной сети;
. Us - напряжение UBC;K2U коэффициент обратной последо- U6 - напряжение UCA; вательности напряжения; LI ел - угол между векторами напря- 20 к°и - коэффициент нулевой последовательности напряжения.
жений UAB и UBC;Аналогичным образом раскладываются L.2 (Xi - угол между векторами напря- на три симметричные составляющие и несимметричная тройка токов, протекающих в
жений UAB и UCA;25 линии, при этом дополнительно учитывают- ,. п ся углы сдвига между напряжением и током , Т4 р4 - угол между векторами UAB и сооУтветствуюЩей фазы /
UBC в несимметричной тройке линейных на-
пряжений;; 1 ,; , 2; , ; ч
30li g-(lA + a IB + ale)
Ts ps - угол между векторами UAB и. , .
12 4- (1А + а1в + а21с) (1.12) UCA в несимметричной тройке линейных на-
пряжений;; J/j.+jR + j Те . р& - аналогичный угол между век- „5 ° 3
торами UBC и UCA;Симметричные составляющие напряже- R4 - действительная часть вектора ли- Ния на зажимах удаленного потребителя определяют по выражениям неиного напряжения UAB;
М - мнимая часть вектора линейного 40
Uin Ui-ii -Zi напряжения UAB;
I Ion I ) 1 ./О
RS - действительная часть вектора UBC;
Ms - мнимая часть вектора Овс; оп ° °
R6-действительная часть вектора UCA; rAeZi,Z2,Zo - соответственно conро тивле- Ме - мнимая часть вектора UCA;ния прямой, обратной и нулевой последова- Wi - действительная часть вектора на- 50 тельности цепи питания от места
установки УПК до удаленного потребителя.
пряжения прямой последовательности Ui ;Отклонения напряжения в каждой фазе NI - мнимая ча. ть вектора напряжения составят:
прямой последовательности Ui ;
Vi - модуль вектора напряжения пря- 55/5 U Ги |п и ном . юо% С1 14)
мой последовательности Ui ;U ном N2 мнимая часть вектора напряжения
.где I - А, В, С - фазы сети, обратной последовательности U2 ;
(1.13)
Коэффициенты обратной и нулевой последовательности напряжения удаленных потребителей K2Un и Koiin определяют по известным выражениям (1.10).
Для уменьшения коэффициентов обратной и нулевой последовательности напряжений K2Un и KoUn необходимо изменить емкостные сопротивления отдельных фаз УПК, при этом, если отклонение напряжения в трехфазной сети, определяемое из выражения
5и„«I U 1п I UHQM UHOM
100% (1.15)
больше нуля, то следует уменьшить сопротивление в той фазе сети, в которой (5Ui наибольшее, и наоборот при 5Un 0 - увеличить емкостное сопротивление УПК в той фазе, где наибольшее по амплитуде с отрицательным знаком. Возможно и одновременное переключение XKI в двух фазах УПК- в одной фазе XKI уменьшают, в другой увеличивают (это в тех случаях, когда 5Un близко к нулю, a K2Un и К0ип выходят за требуемый диапазон).
При дискретном регулировании емкостного сопротивления УПК перед переключением необходимо выполнить проверочный расчет, для исключения такой ситуации, когда после минимального изменения XKI в одной из фаз сети коэффициенты K2Un и KoUn возрастут. Проверка осуществляется следующим образом. После изменения емкостного сопротивления в любой из фаз сети, например в фазе А на величину ДХкд, напряжение на выходных зажимах УПК составит
UA UA-J|AAXKA UB UB
(1.16)
Uc Uc
Далее аналогичным образом, в соответствии с выражениями (1.12 и 1.13) определяют отклонения напряжения и коэффициенты обратной и нулевой последовательности у удаленных потребителей.
Таким образом, реализуя емкостное сопротивление УПК по предлагаемому способу, можно одновременно улучшить два важных показателя качества электроэнергии: уменьшить отклонение напряжения и понизить коэффициенты обратной и нулевой последовательности напряжения на зажимах удаленных потребителей.
На заключительном этапе проверки определяют потери мощности на участке сети от УПК до потребителя:
ДР Н2 -П + 122 T2 + I02
Т
AQ H2 -Xi + l22-X2 + lo2X0
(1.17)
Проверочный расчет может произво- диться и при возможности изменения емкостного сопротивления в других фазах УПК. В результате, для преключения Хю выбирают такой режим, при котором dUm, K2Un, KoUn на зажимах потребителя не выходят за границы, требуемые ГОСТ 13109-87, а потери мощности на участке сети от УПК до потребителя будут минимальны.
С изменением любого из параметров
режима (Од, UB, Uc, 1д,в, Ic) вновь осуществляется пофазная коррекция сопротивления УПК.
На фиг, 7 представлена схема установки, реализующая способ.
Установка продольной компенсации состоит из секционированной КБ 1, трансформатора тока 2, блока коммутации секций КБ 3, трансформаторов напряжения 4, входного устройства тока 5, входного устройства
фазного напряжения 6, входного устройства линейного напряжения 7, преобразователя напряжение-частота 8, селектора частоты 9, формирователя образцовых промежутков времени 10, счетчика временных интервалов 11, буферного регистра 12, формирователя исходного состояния 13, мультиплексора каналов 14, вычислительного устройства 15.
Установка работает следующим образомСигналы, пропорциональные току в линии и напряжению на входе УПК, снимаются с трансформаторов тока 2 и напряжения 4 и поступают на соответствующие входные устройства 5, 6, 7. Входные устройства 6 и 7 представляют собой делители напряжения, а 5 - шунт для приведения входного сигнала к рабочему уровню преобразователя напряжение-частота 8. С выхода блока 8 частота,
пропорциональная входному сигналу, поступает на селектор частоты 9, который за строго определенные промежутки времени, сформированные формирователем образцовых промежутков времени 10, выдает эту
частоту на счетчик временных интервалов 11. С выхода счетчика 11 значение частоты в двоичном коде поступает в буферный регистр 12. Этот регистр необходим для того, чтобы согласовать по времени информацию
с выхода счетчика с поступлением этой информации на вход вычислительного устройства 15. Так как вычислительное устройство имеет ограниченное количество входов, то информация из буферного регистра считывается через мультиплексор каналов 14. Вычислительное устройство 15 представляет собой микроконтроллер в однокристальном исполнении, или может быть выполнено на отдельных элементах. Алгоритм расчета отклонения напряжения и коэффициентов обратной и нулевой последовательности, а также выбора емкостного сопротивления УПК в виде программы записан в постоянное запоминающее устройство.
Таким образом, интервал измерения, который задается формирователем образцовых промежутков времени 10, разбит на два участка - опрос сигналов с датчиков и вычисление результата измерения, После вычисления результатов выдается управляющий сигнал на блок коммутации секций КБ 3. Система измерения и вычисления приводится в исходное состояние формирователем исходного состояния 13, после чего цикл повторяется.
Применение способа позволяет методически более точно производить регулирование напряжения и гибко использовать современную элементную базу. Все блоки устройства выполнены на стандартной элементной базе и могут быть реализованы, например, на микросхемах серий К 155 и К 1816.
Формула изобретения Способ регулирования установки продольной емкостной компенсации, при котором измеряют фазные и линейные
напряжения и токи в сети, отличающийся тем, что, с целью симметрирования напряжения на зажимах удаленных потребителей и снижения потерь мощности в элементах сети, фазные и линейные
напряжения и токи раскладывают на симметричные составляющие прямой, обратной и нулевой последовательности путем определения углов между векторами тройки несимметричных составляющих напряжений и токов и нахождения проекции векторов на оси комплексной плоскости, определяют отклонения напряжения и коэффициенты обратной и нулевой последова- тельности напряжений на зажимах
удаленных потребителей и при положительном знаке отклонения напряжения уменьшают емкостное сопротивление установки продольной компенсации в фазе с наибольшим отклонением напряжения, а при отрицательном знаке отклонения напряжения увеличивают емкостное сопротивление в фазе с наибольшим по модулю отклонением напряжения на зажимах удаленных потребителей с предварительным определением
параметров нового режима работы сети.
| Устройство для автоматического регулирования напряжения и компенсации реактивной мощности в узлах нагрузки | 1976 |
|
SU674149A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулируемая установка продольной емкостной компенсации | 1978 |
|
SU706905A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулируемая установка продольной емкостной компенсации | 1984 |
|
SU1302375A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
