В этом устройстве с помощью функционального преобразователя описывается и фиксируется граница области статической устойчивости в координатах двух любых взаимных углов напряжения генераторных узлов, описываемая уравнением F (5jj, 5ik ) 0. Граница области статической устойчивости аппроксимирована ломаной линией, представляющей собой чаще всего шестиугольник. В этом устройстве оценивается устойчивость текущего режима
по величине S (5ц , 5ik ) и фиксируется выход режима за границу области устойчивости при выполнении условия S 0. В нем реализована возможность выявления места выхода режима за границу области статической устойчивости путем фиксации этого участка границы по сочетанию задания характеристик-координат, разделяющих область устойчивости на четыре квадранта, определяемые, соответственно, по следующим условиям:

Использование: в электротехнике, в противоаварийной автоматике энергосистем, Сущность: в трехмашинной схеме сети, содержащей три генератора с нагрузкой, измеряют три значения активной мощности Изобретение относится к электротехнике и может быть использовано в качестве алгоритма и впоследствии технологического программного обеспечения в устройствах противоаварийной автоматики энергосистем, предназначенных для сохранения устойчивой работы при различных возмущениях и, в частности, при аварийных небалансах мощности в сети энергосистемы со схемой сети, которая может быть представлена трехмашинной позиционной моделью. двух любых генераторных узлов, измеряемых в разные моменты времени PI, (и), Pi (tx-м), Pi (tK +2), Pj (Гк), Pj (t +1), Pj (U+2), И ТрИ значения взаимных углов напряжений в те же моменты времени, 5у (tx), б (Тк-н), д (1к+2), 3ik W, 3ik (Тк-и), 5jk (tx+2). При отсутствии при- ращения взаимного угла, определяют две амплитуды взаимной мощности между генераторами, приращения взаимных углов между которыми не равны нулю, определяют близость режима к границе области устойчивости по выражению S Pijcos 5jj + + Pi cos 5jk , если S 0, то фиксируют статическую перегрузку межсистемной связи, при наличии приращений взаимных углов между генераторами определяют амплитуды взаимных мощностей между всеми генераторами, определяют близость режима к границе устойчивости по выражению S PIJ PiK cos 5jj cos (5ik + Pij PKJ x x cos 5ij cos dkj + PKJ cos djk cos дц , если S 0, то фиксируют наличие статической перегрузки межсистемной связи. 5 ил. Известно несколько способов фиксации статической перегрузки по углу межсистемной связи. Один из способов реализован в устройстве фиксации статической перегрузки сети по углу, содержащем блок измерения разности фаз напряжений с числом входов по числу генераторных узлов энергосистемы, блок реагирующих органов, функциональный преобразователь, выполненный из сумматоров, элемента ИЛИ и т.д. XI Ю О ,s
i , 5м О |кв
и / и 0 Икв
Способ, заложенный в одно из известных устройств, по технической сущности является наиболее близким к заявленному и служит прототипом к изобретению.
Недостатком данного способа является низкая точность фиксации статической перегрузки, так как граница области устойчивости представляет нелинейную кривую, и при аппроксимации прямой возникает большая погрешность.
Для трехмашинной консервативной модели энергосистемы известна система уравнений, определяющих в параметрическом виде связь между максимальным значением перетока мощности по любому из сечений и текущим значением перетока в одном из других сечений, так, например:
DР%3 - PSmax ,
2 Р2 -.....- ...
±Р13 V1 -(
V , , HSmax Р V2 Р23
2 Р12 Р23
р Нз - РЗп Р2------2-р ---
± Раз v 1 - (
V . . / Р2глах
2 Р12Р13
где Pi, P2 - текущие значения активной мощности в сечениях 1 и 2;
Pimax, P2max максимальные значения активной мощности в сечениях 1 и 2.
Эта система уравнений позволяет определить область максимальных режимов на плоскости с координатами, соответствующими значениям перетоков мощности по двум сечениям схемы. Оценка, проведенная при варьировании параметров трехмашинной схемы, показала, что расхождение между значениями максимальных мощностей и пределов апериодической устойчивости не превышает 5%, причем погрешность расчеi , (Зм О
1 кв- di о
« M&t o
та при использовании этой формулы идет в запас расчета, так как область апериодической устойчивости всегда охватывает область максимальных режимов. Однако
20 предлагаемая аппроксимация максимальных перетоков мощности в сечениях предполагает задание некоторых параметров системы (Pi2, Pi3 и Раз) как постоянных величин. В предлагаемом же способе эти па25 раметры системы на каждом цикле расчета пересчитываются, тем самым производится автоматическая корректировка данных параметров, учитывающая возможное изменение проводимости сети и напряжения в
30 узлах энергосистемы.
Целью предлагаемого.способа является повышение точности и надежности фиксации статической перегрузки межсистемной связи по взаимным углам напряжений гене35 раторных узлов.
Поставленная цель достигается за счет того, что в способе фиксации статической перегрузки межсистемной связи в трехмашинной схеме сети, включающей в себя три
40 генераторных узла i, j, k с нагрузкой, характеризуемой двумерной областью статической устойчивости в координатах двух любых взаимных углов напряжения генераторных узлов, описываемой уравнением
45 F (5jj; 5jk ) 0 , основанный на измерении текущих значений любых взаимных углов напряжений генераторных узлов д, 5jk , оценке устойчивости текущего режима по величине S F (5ij, (5jk ) , фиксации выхода режима за границу области статической ус50 тойчивости при выполнении условия S SO, и на выявлении места выхода режима за границу области статической устойчивости путем фиксации этого участка границы по сочетанию задания характеристик-коорди55 нат, разделяющих область устойчивости на четыре квадранта, определяемые соответственно по следующим условиям:
51790021 6
. , ., , ,,, , ... . дц О I кв. { Q II кв. { 0 III кв. { 0 IV кв. { 0 ;
дополнительно измеряют в разные момен- взаимных углов между которыми не
ты времени три значения активной мощно- 5 нулю - Pij и Pkj, или P/J и Pik, или Pkj и PJ по
сти двух любых генераторных узлов i и j - формулам
Pj(tk), Pi(tk+ 1), Pi(tk+ 2), Pj(tk), Pj(tk+ 1),r
Pj(tk+ 2), и три значения взаимных углов на- PI (tk - PI (tk + 1 ) .
пряжений в те же моменты времени -IJ sin дц (tk ; - sin dij (tk + 1 )
dij(tk), dij(tk + 1), dij(tk+2), 10
dik(tk), (5ik(tk + 1 ), djk(tk + 2),повто-j- Pk (tk) - Pk (tk + 1 )
ряемость этих измерений определяется со-k sin dkj (tk ) - sin dkj (tk + 1 )
гласно условию:
по значениям найденных амплитуд взаим- dij (tk) - 5jj (tk + 1) 015 ных мощностей и по значениям взаимных
углов производят оценку устойчивости теку- 5jk (tk) - 5ik (tk + 1) 0,щего режима по величине S, определяемой
по формуле
при удовлетворении этого условия повтор- но измеряют значения указанных пара- 20 s PIJ cos 5ij + Pik cos 5ik, метров, при неудовлетворении - выявляют приращение одного взаимного угла где 5kj, дц , (5jk, равное нулю, по формулам
5ij(tk)(tk + 1)0,
(tk)(tk+l) 0.25
5ik (tk) - 5ik (tk + 1 ) 0 , 5ik(tk)(tk+l) 0,
в случае отсутствия приращений взаимных
5kj (tk) - 5kj (tk + 1) 0,углов между генераторами, равных нулю,
3® определяют амплитуды взаимных мощноопределяют две амплитуды взаимной мощ- стей между всеми генераторами по форму- ности между генераторами, приращения лам:
PJ (ti. ) - PI (ц + 1) -( PI (tk) - Pi ft + 1 ) ,i (ti, ) - (tt + 1 )
Г sin dik (tk)- sin dik (tk + 1 ) sfn dik (n) - sin 5ik (tk + 2 j J Aj (tk) - sin (ц + 1 ) sin dij (tk) - sin дц (л + 2 )
p - PI (tk ) - Pik sin (tk ) - sin 5ik (tk + 1 ) 1sindij(tk)-sin(5ij(tk + 1 )
p Pj (tk) - Pj (tk + 1 ) - Pij sin dij (tk + 1 ) - sin дц (tk) . Jksln 5jk(tk)-sln(5jk(tk + 1 )
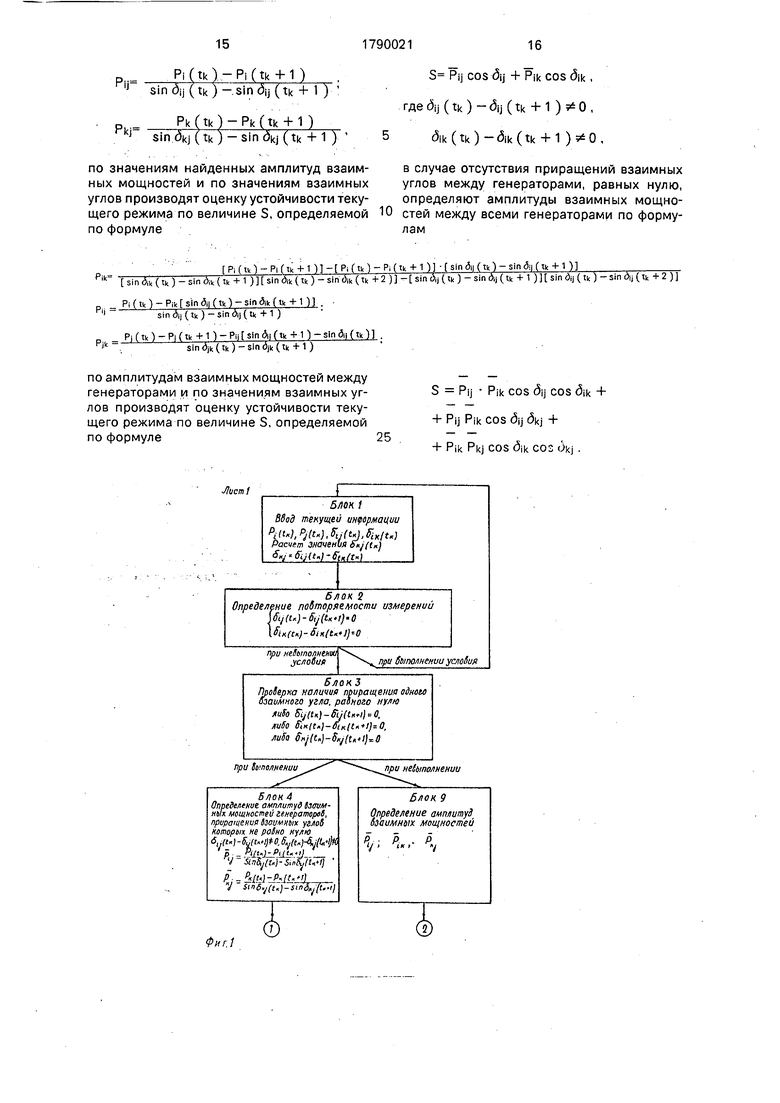
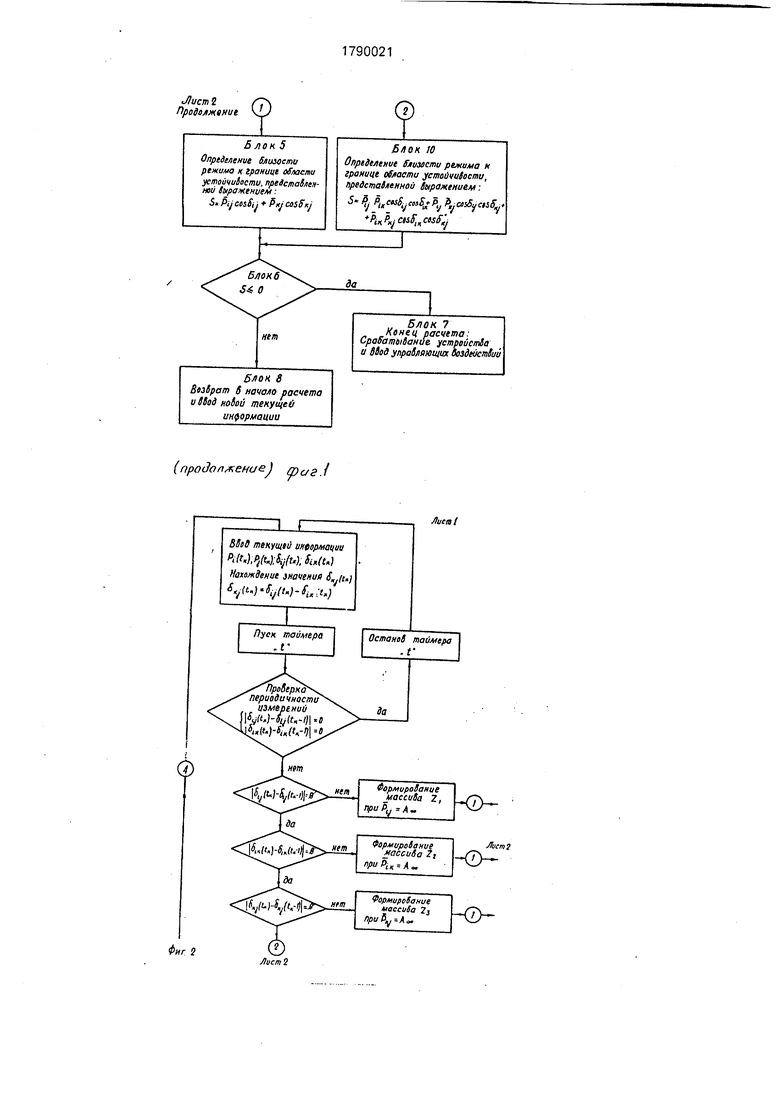
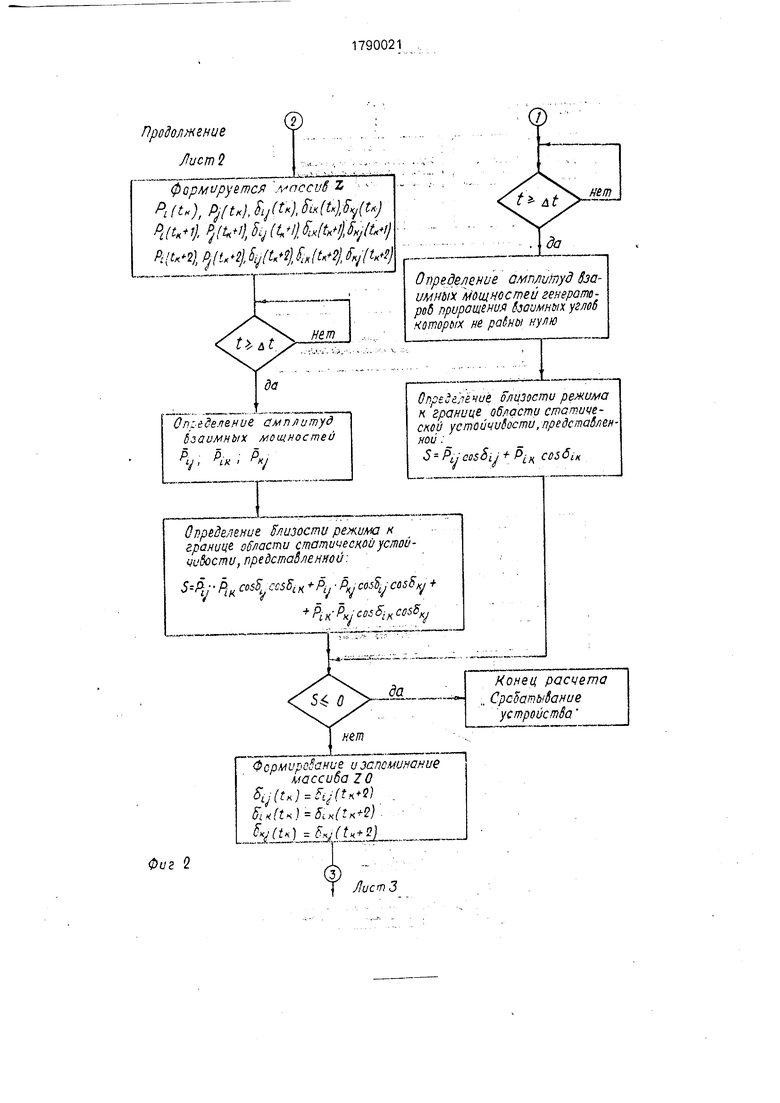
по амплитудам взаимных мощностей междуНа фиг. 1 приведена блок-схема выпол- генераторами и по значениям взаимных уг- нения предлагаемого способа фиксации лов производят оценку устойчивости теку- статической перегрузки межсистемной свя- щего режима по величине S, определяемой зи; на фиг. 2 - блок-схема алгоритма техно- по формуле 50 логического программного обеспечения
устройства, выполненного на микропроцес -сорной базе, этот алгоритм определяет S PIJ Pik cos 6-,j cos 3ik + структуру технологического программного
обеспечения; на фиг. 3 - блок-схема алго 55 ритма, позволяющего зафиксировать зону + Pij Pkj cos Ojj cos Okj + выхода режима за границу области устойчивости; на фиг. 4 и 5 - схемы сети энергоси . , стемы, в которых изобретение может найти + Pik Pkj cos dik cos dkj. свое использование,
Благодаря блок-схеме, показанной на фиг. 1, можно показать, как функционирует предлагаемый способ.
В блоке 1 производят измерение текущих значений активных мощностей углов i и j Pi(tk)i Pj(tk) и текущих значений взаимных углов между генераторными узлами dij (tkj, 5ik (tk) с помощью датчиков мощности и угла и аналого-цифровых преобразователей, На основании полученной информации находят значение взаимного угла dkj по следующей формуле:
,5kj (tk)5ij (tk) (tk).
В блоке 2 определяют повторяемость проводимых измерений. Когда в энергетической системе есть незначительные приращения не менее чем у двух взаимных углов, т.е. при выполнении условия
г 3ц (tk ) - 5у (tk + 1 ) О 1 (3ik(tk )(tk + 1 )0
режим находится в покое (стационарен) и фиксировать режим перегрузки не надо. В этом случае необходимо произвести повторные измерения следующих параметров Pi(tk+ 2), Pj(tk+ 2), 5ц (tk + 2), c5ik (tk + 2).
В противном случае, когда присутствуют значительные приращения взаимных углов, то информация передается в блок 3, который предназначен для выявления приращения одного взаимного угла, равного ну- лю, а два других не равны нулю и изменяются во времени. Этот случай свидетельствует о синхронной работе двух генераторов, приращение взаимного угла между которыми равно нулю. Устойчивость определяется генераторами, приращения взаимных углов которых не равны нулю.
Pi (tk ) Pii + Pij sin djj (tk ) + Pik sin 5jk (tk )
Pi (tk + 1 ) Pn + Pij sin 5ij (tk + 1 ) + Pik sin 5ik (tk + 1 )
Pi (tk + 2 ) Pii + Pij sin dij (tk + 2 ) + Pik sin dik (tk + 2 )
Pj (tk ) PJJ + Pij sin 5ij (tk ) + Pjk sin 5jk (tk ) PjO + 1 ) Pjj + PijSin 5ij(tk + 1 ) + Pjksin(5jk(tk + 1 ) Pj(tk+2) Pjj + Pijsin 5ij(tk+2) + PjkSin 5jk(tk +2).
Для нахождения взаимных амплитуд мощностей используются следующие формулы:
0
5
0
5
0
5
0
При нахождении одного приращения взаимного угла, равного нулю, определяют амплитуды тех взаимных мощностей генераторов, между которыми приращения вза- имных углов не равны нулю. Это организовано в блоке 4,
По значениям взаимных углов и по значениям взаимных мощностей в блоке 5 оценивают близость режима к границе области устойчивости, представленной следующим выражением:
S PJJ cos 5ij + Pik cos 5ik , (1)
где Py, Pik - амплитуды взаимных мощностей,
3ij (tk ) - (Зц (tk + 1 ) 0 ;
5ik (tk) - 5ik (tk + 1 ) 0 .
в блоке б определяют, выполняется ли условие
S 0.(2)
В случае его выполнения в блоке 7 фиксируют наличие статической перегрузки. В противном случае расчет прекращается, формируют массив предшествующих значений и организуют подготовку для ввода новых значений параметров. Эти операции производятся в блоке 8.
В случае, когда нет ни одного приращения взаимного угла, равного нулю, то формируют массив в блоке 9 и, определяют амплитуды взаимных мощностей,
Амплитуды PIJ, Pik, Pjk находятся из решения двух систем уЈавнений при допущении, что РП, PJJ, Pkk, Pjk, Pik за время цикла расчета не изменяются и имеют постоянные знечания:
(3)
Pi (tfc ) PI С tic + t ) - PI (ti, ) - Pi (tk + 1 ) i sin (5|, (ч,) - sin dij (ti, + 1 )
sin «k (tk ) - sin dik (tk + 1 ) sin Ak (tk ) - sin 5ik (tk + 2 ) - sin дц (tk ) - sin 5ц (tk + 1 ) sin AJ (tk j - sin uj (tk + 2 )
Pidkl-PinrsinukCtO-sinUKCtfc +1)1 Plj sin dij (tk) - sin dij (tk + 1.)
W
Pj. - -fj ( «c ) P| ( tic +1 ) - Pjj Sin ft ( tk + 1 ) - Sin б ( tk )
sin djk (tk ) - sin 5jk (tk + 1 )
В блоке 10 оценивают близость режима к границе области устойчивости, представленной следующим выражением:
Предлагаемый способ фиксации статической перегрузки межсистемной связи желательно реализовать на микропроцес- 10 сорной технике. Этот способ может быть воплощен в виде технологического программного обеспечения, структурная схема которого показана на фиг. 2.
S PIJ Pik cos (dy - щ ) cos (djk - oik) +
+ PIJ Pik cos ( dij - dij) cos ( d.-k - «jk ) + 5
10
20
+ Pik Pjk cos ( djk - a,k ) cos ( djk - djk).
Наличие статической перегрузки фиксируют в блоке 6 по формуле (2). В случае, если значение S 0, то работает блок 8, который передает команду в блок 1 для сбора новой информации и о продолжении расчета. При S 0 из блока 6 выводят информацию о наличии опасной перегрузки в блок 7 и посылают команду о вводе управляющих воздействий либо на исполнительный орган, либо через передающее устройство на исполнительный орган.
переменных : PI (tk ) , Pj (tk). dik (tk), dkj (tk )
массив Z1Pi (tk + 1 ), Pj (tk + 1 ), dik (tk + 1 ) , dkj (tk + 1 )
из этого массива Z1 можно только лить амплитуды взаимных мощностей Pik и Pkj. Амплитуда PIJ не определяется, так как приращение взаимного угла д равно нулю,
Z2
Pi Pi
tk), Pj (tk), dij (tk), dkj (tk )
tk + 1 ) , Pj (tk + 1 ), dij (tk + 1 ), dkj (tk + 1 )
Из этого массива определяются амплитуды взаимных мощностей PIJ, Pkj.
Массив Z3
Pi (tk), Pj (tk ), dik (tk), dij (tk ) Pi(tk + l),Pj(tk + l ), dik(tk + l
Из этого массива определяются амплитуды взаимных мощностей PJJ, Pik.
После формирования массива и по окончанию выдержки времени таймера на основании подготовленного массива Z, Z1, Z2, Z3 определяются амплитуды взаимных мощностей и оценивается близость режима к границе области статической устойчивости по формулам (1) или (5).
В случае, если S 0, то расчет останавливается, и формируется массив 0для ор
Предлагаемый способ фиксации статической перегрузки межсистемной связи желательно реализовать на микропроцес- сорной технике. Этот способ может быть воплощен в виде технологического программного обеспечения, структурная схема которого показана на фиг. 2.
Так, на фиг. 2 показано, что после ввода информации о параметрах режима запускается таймер, и информация подается в блок определения повторяемости. В случае удовлетворения условия расчет прекращается, таймер останавливается, и измеряют новые значения параметра.
Pi(tk + 2), Pj(tk+ 2), d,-j (tk+ 2), dik (tk+ 2).
В противном случае проверяют наличие приращения взаимного угла, равного нулю. При наличии такого приращения формируют массивы переменных 21, Z2, Z3, имеющие следующий состав
а это, в свою очередь, связано с тем, что генераторы i и j работают синхронно. Сечения нарушения устойчивости могут быть между генераторами i и k или i и к.
). 4(tk + i)
Массив Z0
ганизации проверки повторяемости измерения. Массив Z 0 представляет собой по- следние значения взаимных углов генераторов:
dij (tk ) dy (tk + 2 ) , dik (tk) dik (tk + 2 ) , dkj (tk ) dkj (tk + 2 ) .
Массив Z0
Затем обнуляются массивы Z, Z1, Z2, Z3 и вводится новая информация о режиме.
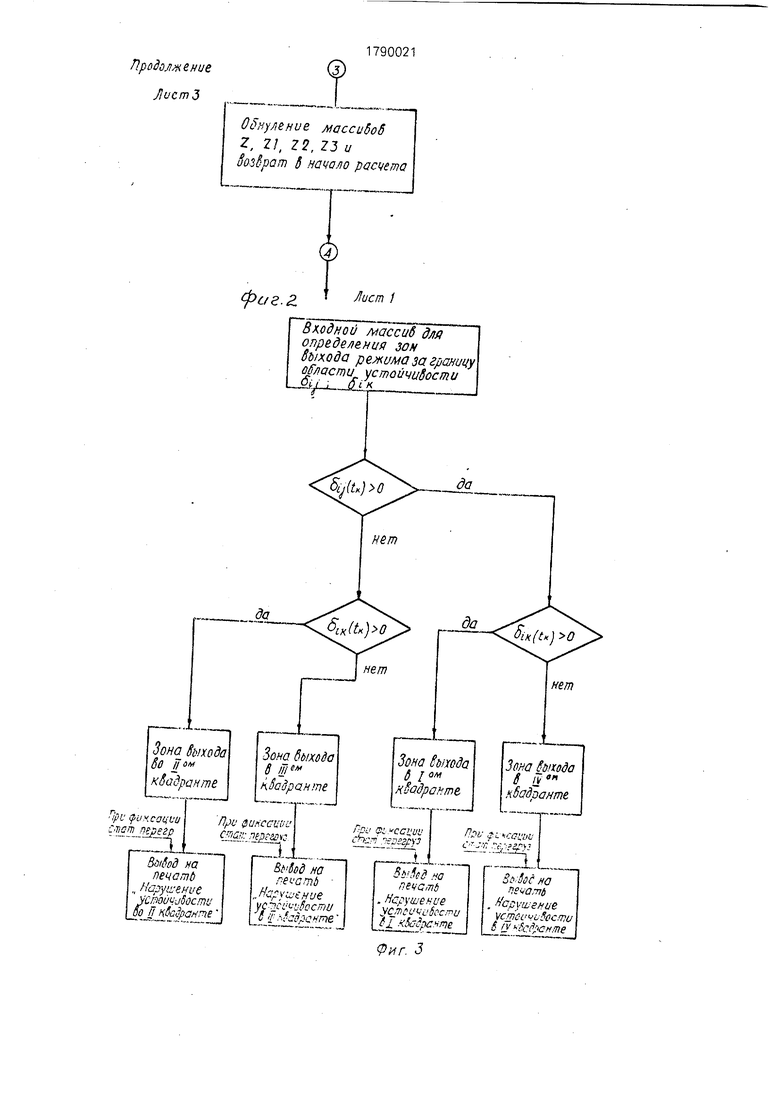
Определение зоны выхода режима за границу области статической устойчивости показано на фиг, 3. В связи с тем, что прототип имеет возможность фиксировать зону выхода за границу области устойчивости, и это свойство необходимо, поэтому в предлагаемый способ внесено это свойство. Однако оно не является отличительной его стороной.
Предполагается, что область статически устойчивой работы генераторов разбивается на четыре квадранта. Для разбиения необходимо задать оси координат в следующих сочетаниях:
5ц 0 dik О
dij О
квадрант,
||кваДРантiPn - РП sinaii - PJJ sin (6jj -ay) -Piksin (5ik -aik) 0 PTJ -PjjSinqj +Py sin (dy -fay)-Pkj sin (dkj -dkj) 0 PTk - Pkk sin «kk H- Pik Sin ( dik + «ik ) + Pkj sin (5kj + «kj ) 0
Решения этой системы уравнений находятся в области существования режимов, границей которой является якобиан системы (6):
Н Pij Pik cos (dy - «у ) cos ( dik - «ik) + + Py Pk cos (dij - ) cos (dkj - «kj) +
+ P-,k
Pkj cos (dik - «ik) cos (dkj - «kj).
(7)
Можно также утверждать следующие положения: любая точка, принадлежащая компоненте связности Н 0, охватывающей начало координат, может явиться устойчивым положением равновесия (устойчивым режимом) системы; внутри компоненты связности Н 0 все решения имеют значения Н 0, при переходе через компоненту знак Н меняется на противоположный.
Таким образом, можно сделать вывод, что, если выражение (7) изменит свой знак, это означает, что режим попал в область неустойчивых несуществующих режимов.
Задачей предлагаемого способа является фиксация близости режима к границе об{
|11кваДРант( dij 0
кваАРантАлгоритм этого способа показан на фиг. 3. Для определения зоны выхода режима формируется входной массив, в который входит любое сочетание взаимных углов {dy и 5ik, 5ij и dik}. На фиг. 3 показано для взаимных углов д и dik. В начале определяется знак 5ij, затем определяется знак 5ik и в зависимости от знаков dy и dik формируется зона выхода режима. Алгоритм состоит из трех блоков сравнения и четырех выходных элементов.
Принципиальная возможность реализации данного способа заключается в следую- щем все положения равновесия (устойчивые установившиеся режимы) определяются системой трансцендентных уравнений:
(6)
5
0
5 0
5
ласти устойчивых режимов, т.е. фиксация факта перехода через нуль выражения (7).
Принципиальная возможность расчета выражения (7) определяется тем, что взаимные углы измеряются, а значения амплитуд взаимных мощностей рассчитываются по формулам (4) в каждом цикле расчета,
В связи с тем, что на всем протяжении переходного процесса производится расчет выражения (7) и сравнение с величиной погрешности, то достигается поставленная цель - увеличение надежности фиксации статической перегрузки.
Вторая цель - повышение точности фиксации статической перегрузки достигается тем, что в предлагаемом способе границей устойчивости описывается выражением (7), которое представляет собой аналитическое выражение границы области существования режимов. Граница области существования режимов либо совпадает с границей устойчивости, либо охватывает ее.
В других устройствах фиксации перегрузки граница области устойчивости аппроксимируется линейными характеристиками, точность такой аппроксимации зависит от числа линейных аппроксимирующих характеристик. Чем их больше, тем выше точность, Однако при увеличении числа
характеристик затруднен выбор коэффициентов наклона и свободных членов и соответствующая настройка устройства по этим характеристикам. Поэтому сейчас в практике проектирования принято, что максималь- ное количество аппроксимирующих участков равно шести, а с этим связана меньшая точность фиксации статической перегрузки сети энергосистемы.
Повышение точности фиксации перегрузки сети энергосистемы также связано с тем, что на каждом цикле расчета производится автоматическая коррекция значений амплитуд взаимных мощностей, т.е. осуществляется учет изменения взаимного сопротивления между станциями, и напряжения на их шинах.
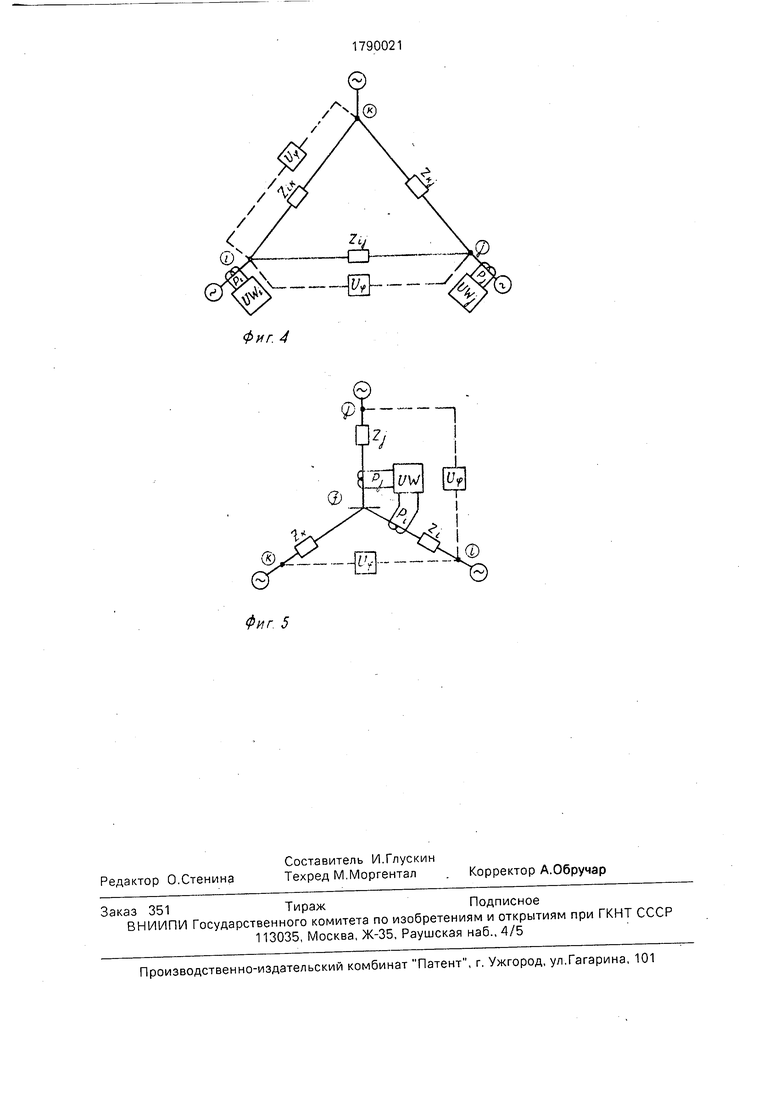
Предлагаемый способ может быть использован в схемах сети, показанных на фиг. 4 и фиг. 5.
В сети, показанной на фиг. 4, устройство фиксации перегрузки предлагается установить в узле i, для обеспечения необФормула изобретения Способ фиксации статической перегрузки межсистемной связи в трехмашин- ной схеме сети, включающей в себя три генераторных узла i, j, k с нагрузкой, характеризуемой двумерной областью статической устойчивости в координатах двух любых взаимных углов напряжения генераторных узлов, описываемой уравнением F((5ij, 6ik) 0, основанный на измерении текущих значений любых взаимных углов напряжений генераторных узкв. {
3ц О
uk 0
II кв. {
5и 0 5ik 0
отличающийся тем, что, с целью повышения точности и надежности фиксации статической перегрузки межсистемной связи, дополнительно измеряют в разные моменты времени три значения активной мощности двух любых генераторных узлов i и j - Pj(tk), Pi(tk+ 1), Pi(tk+ 2), Pj(tk), Pj(tk+ 1), Pj(tk+ 2), и три значения взаимных углов напряжений в те же моменты времени - 5ij (tk ) , 5ц (tk + 1 ) . 5ij (tk + 2 ) , 5ik (tk ) , dik (tk + 1 ) , 5ik (tk + 2 ), повторяемость этих измерений определяется согласно условию:
5ij (tk) - 3ij (tk + 1) 0 5ik (tk) - 5ik (tk + 1) 0,
ходимой текущей информации установлены два датчика мощности и два датчика разности фаз напряжений.
Датчики мощности установлены в генераторных узлах i и j для измерения текущих значений мощностей по двум ветвям Pi и PJ через определенные интервалы времени. Для получения текущих значений взаимных углов 5jj и 5jk в узле i установлены два датчика разности фаз. Значения взаимных углов dij и dik могут быть получены двумя способами: либо с помощью моделирования противоположного вектора напряжения либо с помощью телепередачи фазы соответствующих узлов j и k.
В сети, показанной на фиг. 5, устройство фиксации статической перегрузки устанавливается в узле f, в котором установлены два датчика активной мощности, позволяющих измерить мощность по двум связям Pi и PJ, и два датчика разности фаз напряжений для получения текущих значений взаимных углов , 5ik.
лов, 6, 5ik оценке устойчивости текущего режима по величине S F( дц , д.), фиксации выхода режима сети за границу области
статической устойчивости при выполнении условия S 0 и на выявлении места выхода режима за границу области статической устойчивости путем фиксации этого участка границы по сочетанию задания характеристик-коррдинат, разделяющих область устойчивости на четыре квадранта, определяемые соответственно по следующим условиям:
кв. {
5м 0 ,,, г д 0 (5,1 О IVKB {
при удовлетворении этого условия повторно измеряют значения указанных пара- метров, при неудовлетворении - выявляют приращение одного взаимного угла 5kj, 5ij, 5ik, равное нулю, по формулам
5ij(tk)(tk+1) 0, 5ik N - 5ik (tk + 1) 0, 5kj (tk) - 5kj (tk + 1) 0,
определяют две амплитуды взаимной мощности между генераторами, приращения взаимных углов между которыми не равны нулю - PJJ и Pkj, или PJJ и Pik, или PIJ и Pjk по формулам
Р1Г
Pki
151790021 16
S Pij cos (5jj + Pik cos 5ik, где djj (tk ) - 5ij (tk + 1 ) 0 , :r sin dkj (tk ) - sin dkj (tk + 1 ) (tk)(tk+ 1 )0,
Pi(tk)-Pi(tk + 1 ) sin djj (tk ) -sin djj (tk + 1 )
Pk (tk) - Pk (tk + 1 )
по значениям найденных амплитуд взаим-в случае отсутствия приращений взаимных
ных мощностей и по значениям взаимныхуглов между генераторами, равных нулю,
углов производят оценку устойчивости теку-определяют амплитуды взаимных мощнощего режима по величине S, определяемой10 стей между всеми генераторами по формупо формулелам
(4t)-P|(lk + 1).)-Pi(4c+Ol-tslnu|(Tfc)-Slnu|(tlt + 1) -----
Pi sin(5ik(tk)-sin4k(4. + 1)(tk)-sindik(tk+2))(tk)-sinAi(tk + 1)sindij(tk)-sinC)|i(4t+2)l
PijJk1-Pik sin(5i|(tk)-SinUlc(4. +1 ) .
Pi sin и, О ) - sin dij (tk +1 )
PjjJI I - P| ( Ц +1 ) - Pll Sin A| (tk + О - Sin Uj (tltjl .
H k .sindjk(tk)-sindjk(tk + 1 )
по амплитудам взаимных мощностей между генераторами и по значениям взаимных углов производят оценку устойчивости текущего режима по величине S, определяемой по формуле25
Лист
Г
Б/lon 1 Ввод текущей информации
ЪМ..б ыь) Расчет значения otjftx)
Јiy fij(t,)-ftn(t 1
Блок 2
Определение повторяемости измерений 6ij(u)-6ij(t,4) 0
W(t.)-6i()0
при невыполнении условия
Б/юкЗ
Проверка наличия пьираще/ш.в одном взаимного угла, ройного нулю tufa Sij(tn)-ffu(tKi-i) 0, либо fiKltf)-fftK(tfl)0,
либо Л//Ј.)-Лууе«(/«й
при 1ь:пынении
Блок 4
Определение амплитуд (заим- нь/х мощностей генератора, приращении 1зоимных углоб которых не нулю
tnft-t-SufMltO.ff.fltbrfifr lft
Ъ. -
V Slnfybj-Siffylt)
Р: - ,l}
7 (t,)-sin fyft i)
S PIJ Pik cos 5ij cos 5ik + + Pij Pik cos 5ц c5kj +
+ Pik Pkj COS 5ik COS 6kj .
при Наполнении условия
при не1ыполнеиии
Блок 9
Определение амплитуд взаимных мощностей
Ъ; Ъ,-
Лист 2 Продолжение
I
Блок 5
Определение близости режима к гранит of мсти yemouitutocmu, лрейстаблт- ной (прошением
(npoJofixeHaeJ (рае.I
BliO текущий ии(ормации WJ MfybbfuM Нахождение значений S,,it) Ј j{4mfij(t))
5ЛОК 10
Определение Улизвсти режима к границе ofnocmti ycmouvulocmu, паедста1леннод Цыражением:
5- PfrCtsSyoilifPy Pyafycisfy. ЗД/с«$я«л
Лист I
Г
Определение 8/шзости режима к границе с&ласти статической устой- чибости, представленной:
PlK cesS cesSi K+Py Py cosSy casSy + + Pi PKJCi sSiKcos5ly
Фиг 2
ЛистЗ
Фиг. 5
L
| Устройство фиксации статической перегрузки сети энергосистемы по углу | 1984 |
|
SU1159107A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Невельский В.Л | |||
| и др | |||
| Границы области существования режимов трехмашинной энергосистемы | |||
| - Сб | |||
| трудов НИИПТ - Л.: Энергоатомиздат, 1987, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
