Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического ограничения перетоков мощности электропередач | 1990 |
|
SU1778861A1 |
| Способ автоматического регулирования перетока мощности межсистемной электропередачи | 1989 |
|
SU1809490A1 |
| Способ автоматического регулирования перетока активной мощности | 1989 |
|
SU1742937A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПЕРЕТОКОВ МОЩНОСТИ | 1992 |
|
RU2017304C1 |
| Способ автоматического регулирования перетока мощности | 1990 |
|
SU1774431A1 |
| Способ автоматического регулирования перетоков мощности | 1988 |
|
SU1697182A1 |
| Способ автоматического ограничения перетока мощности между двумя энергосистемами | 1989 |
|
SU1778860A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОГРАНИЧЕНИЯ ПЕРЕТОКА МОЩНОСТИ ЭЛЕКТРОПЕРЕДАЧИ | 1992 |
|
RU2017305C1 |
| Способ автоматического ограничения перетока мощности электропередачи | 1990 |
|
SU1815732A1 |
| Устройство для автоматического регулирования частоты и перетока активной мощности энергообъединения | 1983 |
|
SU1136250A1 |
Использование: для регулирования перетоков мощности электропередач. Сущность изобретения: производится выработка управляющих воздействий отдельным РЭС с учетом допустимых изменений мощности по всем контролируемым электропередачам. При этом допускается изменение мощности по электропередаче, контролируемой регулятором перетока, в пределах, определяемых ее устройчивостью. Восстановление исходного режима регулируемой электропередачи производится при учете ограничений по устойчивости остальных электропередач энергосистемы. Управляющие воздействия РЭС определяются с таким условием, чтобы оказать максимальное влияние на восстановление исходного режима электропередачи. 1 ил.
Изобретение относится к электроэнергетике и может быть использовано для регулирования перетоков мощности по линиям электропередачи.
Известен способ регулирования частоты и перетоков мощности энергообъединения, согласно которому формируют управляющие воздействия регулирующим электростанциям (РЭС) в функции отклонения перетока от уставки регулятора при соблюдении приоритета воздействия от регулятора высшего уровня. Приоритет обеспечивается путем корректировки уставки регулятора перетока при выявлении приращения управляющего воздействия регулятора высшего уровня.
Недостатком такого способа является зависимость его эффективности от быстродействия отработки задания мощности РЭС. Из-за запаздывания в отработкемощности РЭС возникает колебательный процесс изменения регулируемых параметров и нагрузки РЭС, что снижает эффективность способа.
Известен также способ регулирования частоты и перетоков мощности энергообъединения, согласно которому осуществляется регулирование и ограничение перетоков мощности по нескольким электропередачам. При работе ограничителя перетока по внешней связи производится коррекция уставки регулятора перетока мощности, что приводит к колебательному процессу из-за несогласованной работы ограничителя перетока и регулятора перетока.
Цель изобретения - повышение надежности работы энергосистемы путем оптими- зации распределения управляющего воздействия регулятора и ограничителя перетока между отдельными РЭС, направлен5
СО
ел
со
ной на исключение перегрузки контролируемы э лёктропёредач.
Поставленная цель достигается тем, что в способе автоматического регулирования перетоков активной мощности формируют управляющее воздействие на изменение мощности РЭС в функции отклонения перетока мощности от уставки регулятора. При этом корректируют уставку регулятора в течение времени существования отклонения параметра, находящегося под контролем ограничителя перетока или регулятора высшего уровня, и осуществляют возврат уставки регулятора перетока к исходному значению в случае отсутствия отклонения указанного параметра. Фиксируют отклонение перетока сверх уставки ограничителя перетока электропередачи k и определяют предельно допустимые, приращения перетоков мощности по всем m контролируемым электропередачам APnj 0 1-т). как Ра.з- ность предельно допустимой величины перетока и его текущего измеренного значения, Определяют максимум целевой
ФУНКЦИИ .QfclPl +«k2P. +... + OknPn макс, где Oki - коэффициент влияния изменения мощности 1-й РЭС на переток k-й электропередачи, При ограничениях, накладываемых на изменение мощности РЭС по условию отсутствия изменений контролируемых перетоков, превышающих допустимые приращения АРnj. Затем определяют значение предельно допустимых приращений мощности л РЭС PI (i 1,п) путем решения указанной целевой функции при введенных ограничениях. Изменяют уставку регулятора перетока до значения предельно долу- .стимой величины перетока и формируют управляющие воздействия на изменение мощности РЭС Pis при выполнении условия Pi3 Pi. Затем осуществляют смещение уставки регулятора перетока до ее первоначального значения- при отсутствии отклонения указанного параметра. Одновременно определяют максимальное значение целевой функции OM.PI + аюРг + +«inPn макс, где сс - коэффициент влияния изменения мощности f-й РЭС на переток 1-й регулируемой электропередачи, при ограничениях, накладываемых на изменение мощности РЭС по условию отсутствия изменений контролируемых перетоков, превышающих предельно допустимые приращения ДР П. Затем определяют значения предельно допустимых приращений мощности РЭС при восстановлении уставки регулятора перетока Р ( 1,п) путем решения целевой функции при введенных ограничениях. После чего формируют управляющие воздействия на изменение мощности РЭС Р|з при выполнении условия Pia Pi .
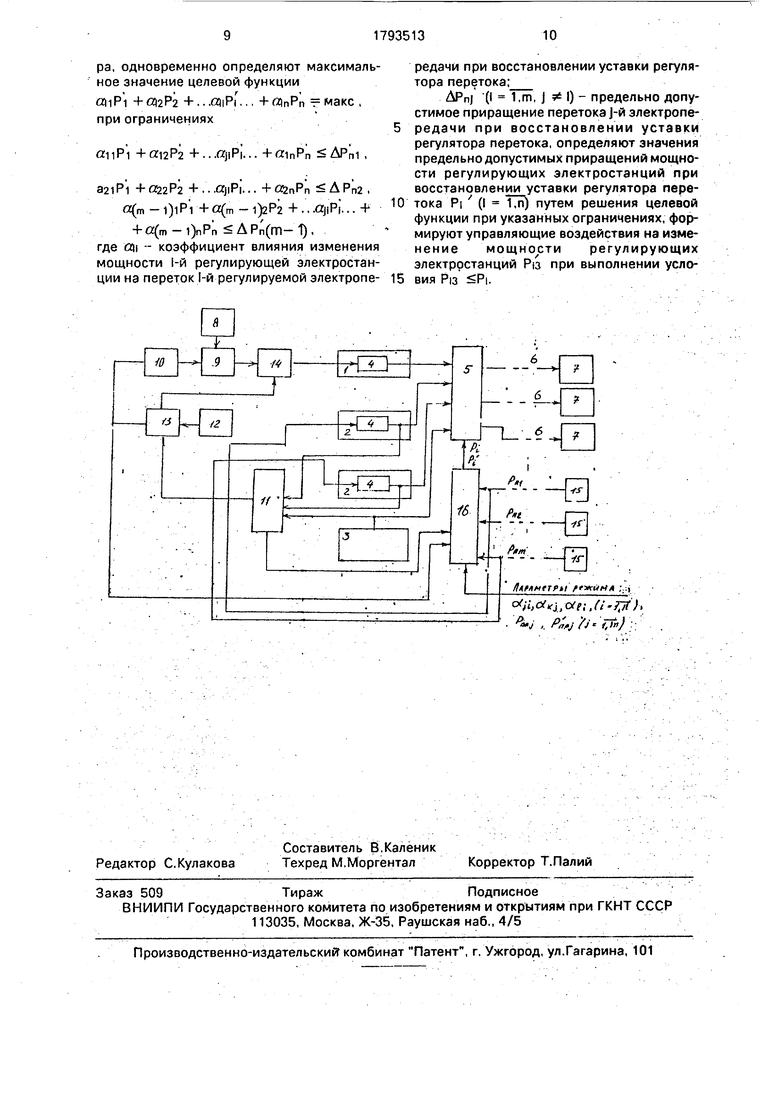
На чертеже приведена схема реализации способа.
Схема содержит регулятор 1 перетока мощности, ограничители 2 перетока мощности, блок 3 выявления приращения управляющего воздействия высшего уровня, блок 4 формирования приращений управляющего
воздействия, блок 5 распределения управляющего воздействия регулятора перетока и ограничителей.перетоков между отдельными РЭС, канал б телеуправления, регулирующую электростанцию 7, датчик 8
5 перетока мощности, блок 9 сравнения, за- датчик 10 уставки регулятора перетока, блок 11 управления, задатчик 12 предельно допустимой величины перетока мощности, блок 13 изменения уставки регулятора перетока,
0 блока 14 режима, датчик 15 перетока мощности электропередачи, вычислительный блок 16.
. Система автоматического регулирования перетоков работает следующим обра5 зом.
Блок сравнения 9 вырабатывает сигнал величины отклонения перетока мощности, измеряемого датчиком 8, от уставки регулирования, определяемой задатчиком 10. При
0 отсутствий управляющих воздействий, вырабатываемых ограничителями перетока 2, и управляющего воздействия регулятора высшего уровня, выявляемого блоком 3, выходной сигнал блока 11 управления равен.
5 нулю. В этом случае выходные сигналы блока 13 также будут равны нулю. Отсутствие сигнала по каналу с выхода блока 13 на вход блока 14 определяет режим работы блока 14, при котором будет осуществляться регу0 лирование перетока мощности (поддержание его на неизменном уровне). В этом режиме блок 14 пропускает с выхода блока 9 на вход блока 4 сигналы отклонения перетока обоих знаков.:
5
В блоке 4 регулятора 1 производится формирование управляющих воздействий на изменение мощности РЭС с использованием, например, пропорционально-диффе0 ренциально-интегрального закона регулирования перетока мощности. При осуществлении регулирования блок 4 воспринимает отклонения перетока обоих знаков. Выходной сигнал блока 4 является,
5 таким образом, функцией отклонения перетока мощности. Управляющее воздействие, вырабатываемое этим блоком, распределяется блоком 5 между отдельными РЭС в соответствии с коэффициентом долевого участия.
При работе хотя бы одного ограничителя перетока мощности или регулятора высшего уровня блок 11 вырабатывает сигнал, который поступает на вход блока 13. В этом случае блок 13 образует на первом выходе сигнал, который передается на блок 14. .По этому сигналу блок 14 настраивается на прием сигналов, соответствующих только положительному отклонению перетока мощности (сигналы отрицательного отклонения перетока игнорируются). Поэтому будет осуществляться ограничение перетока регулируемой электропередачи при измененном значении уставки. В задатчике 12 фиксируется предельно допустимое значение перетока мощности регулируемой электропередачи. В рассматриваемом режиме это значение перетока передается блоком 13 на второй выход, соединенный с эадатчи- ком 10 уставки. При этом задатчик 10 изменяет уставку с исходного значения на величину предельно допустимого перетока регулируемой электропередачи. Ограничение перетока этой электропередачи будет производиться при увеличенном значении уставки, что снижает ограничения на изменения мощности РЭС.
При работе ограничителя перетока электропередачи с номером k информации об этом номере передается по каналу от блока 11 управления на вход вычислительного блока 16, который, в этом случае, настраивается на решение целевой функции:
«kiPi +Ok2P2 +.;. +«kn Рп макс, при ограничениях
«11Р1 +«12P2 -ЬСПпРп ДРп1, . «21Р1 + 022Р2 + + «2nPn Д РП2 , а(т - 1)1Р14- «(m - + ... +ОГ(т-1)пРп APn(m-1),
где 2io коэффициент влияния изменения мощности 1-й РЭС на переток мощности к-й электропередачи
i 1,п;.
п- число РЭС;.
а - коэффициент влияния изменения мощности 1-й РЭС на j-й переток мощности;
j 1,m,
m - число контролируемых электропередач; .:....;
APnj - предельно допустимое приращение перетока мощности J-й электропередачи, определяемое как разность предельно допустимой величины перётокэ и его текущего измеренного значения;
Pi - приращение мощности 1-й РЭС.
Коэффициенты влияния оы, a и предельно допустимые значения перетоков мощности Pnpj вычисляются заранее и вводятся в запоминающее устройство блока 16.
Текущие значения перетоков мощности Pnj контролируемых электропередач замеряются датчиками 15 и передаются по каналам телеизмерения на вход блока 16, в котором 5 вычисляются предельно допустимые приращения перетока мощности по контролируемым электропередачам по выражению ДРп) Рпр - Pni, j 1,m,J k. Решение целевой функции производит0 ся блоком 16 методом линейного программирования. В результате решения получаются предельно допустимые величины приращений мощности РЭС Pi (I 1 ,п), реализация которых не приводит к пере5 грузке контролируемых электропередач. Величины допустимых приращений PI передаются с выхода блока 16 на вход блока 5 распределения управляющих воздействий. Коэффициенты долевого участия РЭС в реа0 лизации управляющего воздействия выбираются так, чтобы соблюдалось условие Pia Pi, где Pis - задаваемое значение мощности 1-Й РЭС, соответствующее коэффициенту долевого участия этой РЭС. Реализация управля5 ющего воздействия, выработанного ограничителем k-й электропередачи, при астатическом регулировании перетока мощности приводит к полному подавлению отклонения этого пёретока. Выходной сиг0 нал блока 11 снимается, при этом выходные сигналы блока 11 будут равны нулю. Блок 13 возвращается в исходный режим, при котором снимаются сигналы с обоих его выхо- . дов. Отсутствие сигнала на входе блока 14
5 вызывает перевод его в режим осуществления регулирования перетока мощности. В этом режиме блок 14 пропускает с входа на / выход сигналы, поступающие от блока 9, s любой полярности, При этом будет осущест0 вляться регулирование перетока мощности на заданную величину (исходное значение уставки). В рассматриваемом режиме отсутствует входной сигнал блока 10, поступающий по каналу от блока 13. Задатчик 10
5 возвращается к исходному значению уставки, которая по своему значению меньше ус- тавки, соответствующей предельно допустимой мощности регулируемой электропередачи. Изменение (снижение) уставки
0 вызывает увеличение отклонения перетока мощности. Сигнал величины отклонения, проходя через блок 14, появляется на входе регулятора перетока. Действие этого регулятора в режиме восстановления его устав- 5 ки до исходного значения может вызвать перегрузку электропередачи, контролируемыми ограничителями перетока. Поэтому производится оптимизация распределения управляющего воздействия, вырабатывавого регулятором 1, между отдельными РЭС путем решения целевой функции
Oh Pi-f счгРа +.., -f#|nPn -Макс , . при ограничениях
G11P1 +«12Р2+...+«1пРп АРп1 , : 32lPl + QSZ2P2 +....-ffla nPn APn2, a(m-l)lPl +0(m.-l)2P +--.,;, -г 0(m - :Ј Д Pn(m- 1) ,
де a - коэффициент влияния изменения ощности i-й РЭС на переток 1-й регулируеой электропередачи; ;:: ;
APnjQ 1,m, J I)- предельно допусти- ое приращение перетока j-й электропереачи при восстановлении уставки регулятора перетока, которое определяется по выражению ДРп Pnpj - Pnj (Pnj - текущее значение перетока мощности й электропередачи);
РУ -приращениеМощности 1-й РЭС.
Вычислительные операции по решению целевой функции с принятыми ограничениями производятся блоком 16 по информации, поступающей от датчиков текущего значения пёретоков мощности 1В и данных запоминающего устройства блока 16, в которое заранее вводятся расчётные Значения коэффициёйтбе влйявш щ, а и предельные значения перетоков Pnpj.- :
В результате решения целевой функции методом линейного программирования определяются предельно допустимые приращения мощности РЭС PI , реализация которых не вызывает перегрузку контролируемых электропередач. Величины приращений мощности Pi 0 ТТп) передаются с выхода блока 16 Яа вход блока 5, в котором определяются величины .приращений мощности отдельных РЭС PIS , реализующих управляющее воздействие регулятора перётока 1., При этом должно соблюдаться условие PIS :ЈPi , т.е. задание на приращение мощности 1-й РЭС не должно превышать предельной величины Pi . По каналам телеуправления 6 задания Р(З передаются на РЭС, подключенным к системе регулирования и ограничения перетоков.;
Реализация предлагаемого способа автоматического регулирования перетоков НШвШяет ЬптШлйМровать.процесс управ- ления РЭС при работе огр айичйтеля перетока и в период Bbcctановления мощности регулируемой электропередачи до исходного значения. Вырабатыёаемые регулятором управляющие воздей вия не приводят k ё г1р уйкё йЬн р;Шй|5у ёмых электропере- дач. : ; ; :...--.... .,.-.... ...
Формула изобретения Способ автоматического регулирования перетоков активной мощности, в котором формируют управляющее воздействие на
изменение мощности регулирующих электростанций в функции отклонения перетока
мощности от уставки регулятора, корректируют уставку регулятора в течение времени существования отклонения параметра, находящегося под контролем ограничителя перетока или регулятора высшего уровня, осуа ествляют возврат уставки регулятора перетока к исходному значению при отсутствии отклонения указанного параметра,
отличающийся тем, что, с целью повышения надежности в работе энергосистемы, фиксируют отклонение перетока сверх уставки ограничителя перетока электропередачей k, производят
определение предельно допустимых приращений перетока мощности по контролируемым электропередачам ДРп, где j 1,m, , m - число контролируемых электропередач, как разности предельно допустимой величины перетока и его текущего измеренного значения, затем определяют максимум це левой функции -bak2P2.+ akiPi +... Рп макс,
при ограничениях
anPi +ai2P2 +,.. -haijPi.+ainPn APni,
+ «22P2 +... .«ijPi... + OZnPn A Pn2 . «(m - l)iPH- a(m - 1)2P2.. .CCijPi + .. . -f CZ(m - A Pn(m-1) ,
где 2ki - коэффициент влияния изменения
мощности i-й регулирующей электростанции на переток мощности k-й электропередачи; - .
- величина коэффициента влияния изменения мощности i-й регулирующей
электростанции на j-й переток мощности;
i 1 ,n, n - число регулирующих электростанций,
затем определяют значения предельно допустимых приращений мощности регулирующих электростанций PI, путем решения- указанной целевой функции при введенных ограничениях, изменяют уставку регулятора перетока до значения предельно допустимой величины перетока, формируют управляющие воздействия на изменение
мощности регулирующих электростанций Р|з при выполнении условия Ро Pi, осуществляют смещение уставки регулятора перетока до ее первоначального значения при отсутствии отклонения указанного параметpa, одновременно определяют максимальное значение целевой функции
он Pi + OI2P2 + ...«||Р(... + «lnPn макс , при ограничениях
anPi + ...«jjPi... + ainPn :SAPni,
32lPl +СГ22Р2 +.. .OjlPl... + 02r.Pn Ј А Рп2 , 0(m - 1)1 Pi + 0(m + - - .«JiPl- +
+ a(m - A Pn(m-1), где 03i - коэффициент влияния изменения мощности 1-й регулирующей электростанции на перетек 1-й регулируемой электропередачи при восстановлении уставки регулятора перетока;
APnj (I 1.m, J I) - предельно допустимое приращение перетока J-й электропередачи при восстановлении уставки регулятора перетока, определяют значения предельно допустимых приращений мощности регулирующих электростанций при восстановлении уставки регулятора перетока PI (I iTn) путем решения целевой функции при указанных ограничениях, формируют управляющие воздействия на изменение мощности регулирующих электростанций Ро при выполнении условия Pis Р.
&ti), Otti,
,. PWJ J Ј) :
| Устройство для автоматического регулирования частоты и активной мощности энергообъединения | 1974 |
|
SU545038A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического регулирования частоты и активной мощности энергообъединения | 1974 |
|
SU556535A1 |
