напряжения, и, следовательно, уменьшать разрешающую способность устройства. Помимо этого габариты, вес устройства и его стоимость велики. Быстродействие мало.
Наиболее близким к предлагаемому устройству по принципу действия является цифровой тахометр, который работает следующим образом. В выходных сигналах СКВТ содержатся две гармоники: одна с частотой, равной сумме частоты питания и частоты вращения ротора СКВТ, а вторая с частотой, равной их разности. При помощи двойного фазовращающего моста эти составляющие выделяются, а затем, измеряя отклонения периодов этих составляющих от периода питающего СКВТ напряжения, находят тем самым частоту вращения ротора.
Недостатком этого устройства являются большие габариты, вес и сложность в изготовлении. Быстродействие мало, так как определяется периодом вращающегося поля.
Целью изобретения является уменьшение весогабаритных параметров, увеличение быстродействия и упрощение преобразователя угловой скорости.
Поставленная цель достигается тем. что, в устройство, содержащее датчик, первый и второй выходы которого соединены со входами соответственно, первого и второго формирователей импульсов, генератор импульсов, счетчик импульсов, регистр и сумматор введены блок управления, преобразователь кода, элемент задержки, задатчик кода константы, ключ и формирователь временного интервала, а датчик выполнен в вида неподвижного диска с кольцевой дорожкой пермаллоевых аппликаций, под которыми с постоянным шагом размещены соединенные последовательно генераторы цилиндрических магнитных доменов, кольцевой аннигилятор, который включен последовательно с генераторами цилиндрических магнитных доменов, неподвижного установленного соосно диску формирователя поля смещения, блока формирования вращающегося магнитного поля и установленного на входном валу Г-образ- ного кронштейна, на котором размещены головки считывания, выходы которых являются выходами датчика, выходы первого и второго формирователей импульсов соединены с первым и вторым аходами блока управления и со входами формирователя временного интервала, выход которого соединен с управляющим входом ключа, информационный вход которого подкл:оче.н к выходу генератора импульсов, а выход соединен со счетным входом счетчика импульсов, вход обнуления которого подключен к вых оду первого формирователя импульсов,
0
5
0
5
0
5
0
5
0
5
а выходы соединены с информационными входами преобразователя кода, выходы которого соединены с первой группой информационных входов сумматора, вторая группа информационных входов которого подключена к выходу задатчика кода константы, выход генератора импульсов соединен со входом блока формирования вращающегося поля и с третьим входом блока управления, четвертый вход которого является входом запуска преобразователя, а первый выход соединен с управляющим входом преобразователя кода и через элемент задержки подключен к управляющему входу сумматора, выходы которого соединены с информационными входами регистра, выходы которого являются информационными выходами преобразователя, второй выход блока управления соединен с управляющим входом регистра и является синхронизирующим выходом преобразователя, третий выход блока управления соединен со входом первого генератора цилиндрических магнитных доменов, выход аннигилятора соединен с шиной нулевого потенциала.
Суть изобретения заключается в следующем.
В редкоземельных ферромагнетиках (ортоферриты, ферритгранаты и др.) могут существовать отдельные намагниченные области - цилиндрические магнитные домены (ЦМД). С помощью вращающегося магнитного поля или другими способами можно перемещать ЦМД по определенным траекториям (например, по окружности). Если вращающийся с большой скоростью (до 1400 м/с) ЦМД фиксировать (обнаруживать) в моменты прохождения возле двух магнитных (или оптических) головок, размеченных на определенный угол, в процессе движения последних, то можно определить разность скоростей домена (шд ) и головок, связанных с валом (а%).......
(A-)f (D
где шд - угловая скорость вращения домена;а)в - угловая скорость вала (и головок); рс - угловое расстояние между головками П Г2:
t2 - время пробегания ЦМД между головками П Г2.
Угловую скорость вала можно определять как разность между угловой скоростью домена и разностью (а)ц - Шв угловых скоростей домена и вала.
Угловая скорость домена может быть определена путем деления угловой величины рс (расстояние между головками) на время пробегания ЦМД между головками при их неподвижном состояний
(2)
Фс
Т
где ti - время пробегания ЦМД между неподвижными головками. Отсюда, угловая скорость вала будет определяться по формуле
We Шд - (Уд -Шв )Ј-§
(
Т.2
(3)
Так угловая скорость домена определяется стабильной частотой вращающегося магнитного поля, то ее можно считать величиной постоянной, т.е.
Юд
const C .
ti
(4)
Тогда выражение (3) можно записать следующим образом
C-
1 t2 c(d-l).
t2
(5)
Время t2 можно измерить путем заполнения частотой fr генератора интервала между моментами встречи ЦМД с магнитными головками П и Г2.
N N2 frt2;t2 -Л
Тг
(6)
где fr - частота генератора стабильной частоты;
N2 - число импульсов генератора, прошедших за время t2. Подставим (6) и (5) и получим
WB(CI-).
(V)
Так как частота fr постоянна, выражение (7) можно записать
1
-ИС2-щ).
(8)
Частоту fr и угол между головками с можно подобрать такими, что их произведение будет иметь значение одного из чисел К ряда (1.10)100, 1000, 10000...). Тогда
ад. к-(с2-).
(9)
В этом случае для определения угловой скорости достаточно определить выражение в скобках
(Ю)
Техническая реализация этого выражения осуществляется следующим образом. Создается генератор постоянного числа С219 в двоичном коде, измеряется время t2 пробегания ЦМД между двумя движущимися валом головками путем заполнения этого интервала импульсами стандартной частоты (это измерение равно числу N2) далее с 5 помощью ППЗУ осуществляется преобразование 1/N2. Число С219 и число 1/№ подаются на вычитатель, на выходе которого появляется число, соответствующее угловой скорости Знак этого числа будет опре0 делять направление вращения вала.
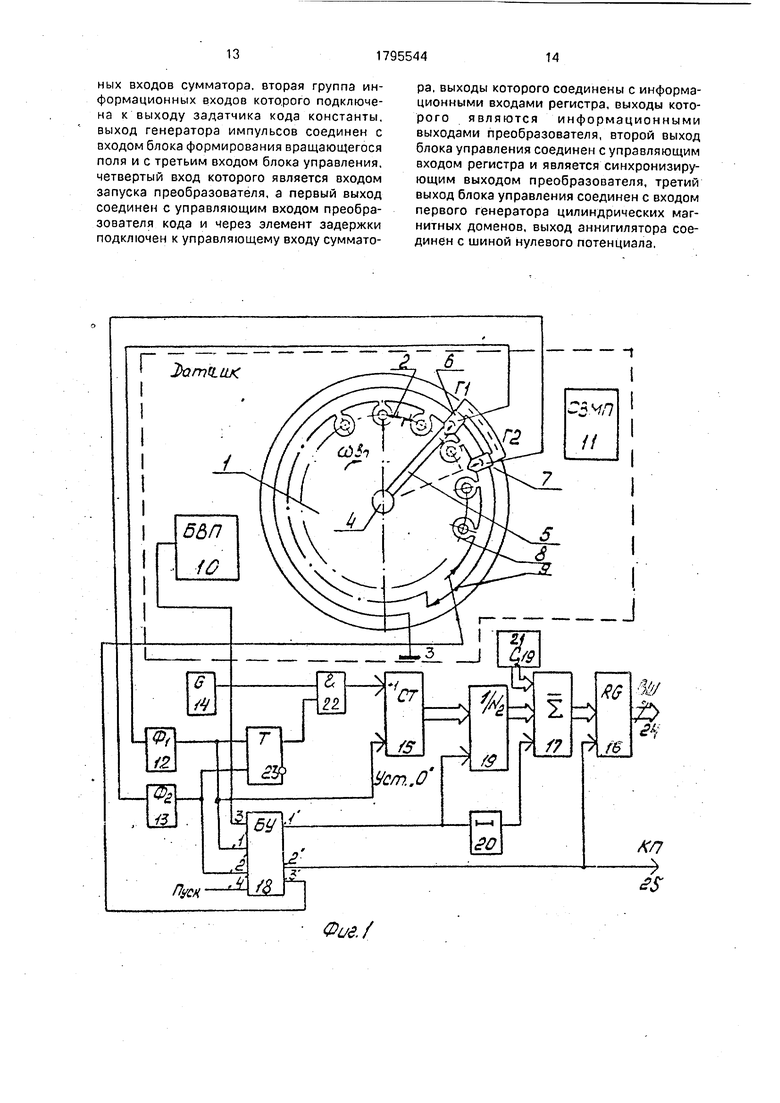
На фиг.1 представлена структурная схема измерителя угловой скорости; на фиг.2 - вариант реализации блока управления, В состав устройства входят ферромагнитный
5 диск 1 (фиг.1), носитель ЦМД, доменопрод- вигающая структура 2 из пермаллоевых аппликаций, шина нулевого потенциала 3, вал 4, кронштейн 5, закрепленный на валу, магнитные головки 6,7, установленные на крон0 штейне, генераторы 8-0 ЦМД, аннигилятор 9 ЦМД, формирователи 13 и 12 сигналов головок, формирователь временного интервала, выполненный на триггере 23, блок уп- равления 18, ключ, выполненный на
5 элементе И 22, генератор 14 тактовых импульсов, счетчик СТ15, преобразователь кодов 19, вычитатель 17, шина константы 21, элемент задержки 20, регистр 16 результата, выходная шина.24, шина синхронизации
0 25, блок 10 формирования вращающегося магнитного поля, формирователь 11 поля смещения.
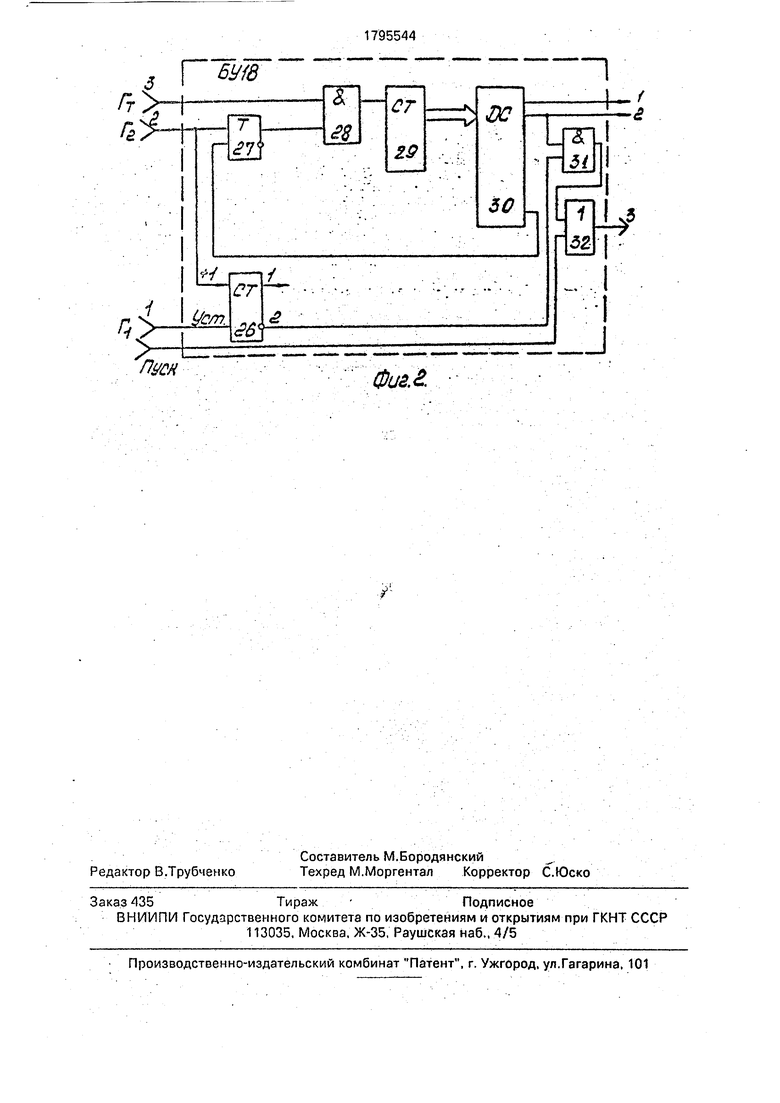
На фиг.2 показаны следующие блоки: счетчик 26, триггер 27, элемент И 28, счетчик
5 29, дешифратор 30, вентиль 31, элемент ИЛ И 32 Элементы 1,2, 3,4, 5, 6, 7, 8. 9, 10, 11 представляют собой единый конструктивный блок-датчик.
Таким образом преобразователь угло0 вой скорости вала в код содержит датчик, первый и второй выходы которого соединены с входами соответственно первого и второго формирователей импульсов 12, 13, генератор импульсов 14, счетчик импульсов
5 15, регистр 16 и сумматор 17, блок управления 18, преобразователь кода 19, элемент задержки 20, задатчик ода константы 21, ключ 22 и формирователь временного интервала 23, а датчик выполнен в виде непод0 вижного диска 1 с кольцевой дорожкой 2 пермзллоевых аппликаций, под которыми с постоянным шагом размещены соединенные последовательно генераторы 8 ЦМД, кольцевой аннигилятор 9, который подклю5 чен последовательно с генераторами ЦМД к шине нулевого потенциала 3, неподвижного установленного соосно диску формирователя поля смещения 11, блока формирования вращающегося магнитного поля 10 и установлённого на входном валу 4 Г-образного кронштейна 5, на котором размещены головки считывания 6, 7, выходы которых являются выходами датчика, выходы первого и второго формирователей импульсов 12, 13 соединены с первым и вторым входами блока управления 18 и со входами формирователя временного интервала 23, выход которого соединен с управляющим входом ключа 22, информационный вход которого подключен к выходу генератора импульсов 14, а выход соединен со счетным входом счетчика импульсов 15, вход обнуления которого подключен к выходу первого формирователя импульсов 12, э выходы соединены с информационными входами преобразователя кода 19, выходы которого соединены с первой группой информационных входов сумматора 17, вторая группа ин- формационмых входов которого подключена к выходу задатчика кода константы 21, выход генератора импульсов соединен со входом блока формирования вращающегося поля 10 и с третьим входом блока управления 18, четвертый вход которого является входом запуска преобразователя, а первый выход соединен с управляющим входом преобразователя кода 19 и через элемент задержки 20 подключен к управляющему входу сумматора 17, выходы которого соединены с информационными входами регистра 16, выходы 24 которого являются информационными выходами преобразователя, второй выход блока управления соединен с управляющим входом регистра и является синхронизирующим выходом преобразователя 25, третий выход блока управления соединен со входом первого генератора цилиндрических магнитных доменов 8.
Первый вход блока управления 18 (фиг.2) соединен с первым входом счетчика
26. второй - со вторым входом счетчика 26 и первым входом триггера 27, а третий - с первым входом элемента И 28, второй вход которого подключен к выходу триггера
27. а выход - ко входу счетчика 29. Выход счетчика 30 соединен с выходом дешифратора 30, первый выход которого соединен с первым выходом БУ 18. второй - с вторым выходом БУ 18и первым входом вентиля 31, а третий - с вторым входом триггера 27. Второй вход вентиля 31 подключен к запрещающему выходу счетчика 26, а выход - к третьему выходу БУ 18 через элемент ИЛИ 32. четвертый вход БУ 18 (пуск) соединен с вторым входом элемента ИЛИ 32, выход 3 которого соединен последовательно с генераторами ЦМД 8 и аннигилятором.
Устройство работает следующим образом.
При включении питания устройства через вход 4 БУ 18 подается сигнал, который
воздействует на вход элемента ИЛИ 32 и на его выходе 3 появляется импульс, создающий с помощью генераторов ЦМД 8 цилиндрические магнитные домены и с помощью аннигилятора 9 уничтожающий все осталь0 ное. Таким образом схема приводится в исходное положение.
Теперь под действием вращающегося магнитного поля ЦМД перемещается подо- менопродвигающим структурам 2. При про5 хождении ЦМД возле первой магнитной головки 6, которая как и головка 7, вращается валом 4 на кронштейне 5, на ее выходе возникает импульс, который через формирователь 12, устанавливаеттриггер23 веди0 ничное состояние. При дальнейшем движении ЦМД возле магнитной головки 7, на выходе последней возникает импульс, приводящий через формирователь 13 триггер 23 в нулевое (исходное)-состояние. Та5 ким образом, на выходе триггера 23 формируется импульс, длительность которого равна времени прохождения ЦМД между первой и второй головками. Импульс с выхода триггера 23 подается на управляю0 щий вход элемента 1/1 22. Другой вход этого элемента подключен к генератору 14 тактовых импульсов. В результате на выходе элемента И 22 появляется пачка, в которой количество импульсов N2 пропорционально
5 времени ta прохождения ЦМД между головками 6 и 7. Счетчик 15 подсчитывает число импульсов N2. По сигналу с первого выхода БУ 18 срабатывает преобразователь 19, на выходе которого формируется код, равный
0 1/N2. Этот код подается на вычитатель 17, который вычитает из числа Са19 задатчика кода 21 полученное из преобразователя число. Эта операция осуществляется по команде с элемента задержки 20. Код, полученный
5 на выходе вычитателя 17 представляет собой угловую скорость вращения вала. Этот код по импульсу со второго выхода БУ 18 переписывается в регистр 16, работающий на выходную шину 24 и одновременно на
0 шине 25 формируется импульс синхронизации считывающего кода. Импульс с третьего выхода БУ 18 осуществляет приведение в исходное состояние (положение) ЦМД для организации нового цикла, т.е. создаются
5 ЦМД в генераторах 8i-8n и стираются все остальные ЦМД аннигилятором 9.
Управляющие воздействия на БУ 18 осуществляют головки 6, 7 через формирователи 12, .13. БУ 18 вырабатывает последовательно два управляющих сигнала
с выходов 1 и 2 по команде с головки Г2 (7), Для исключения ложной работы, в случае, если в каком-либо положении кронштейна между головками окажется генератор ЦМД, в БУ13 введены счетчик 26 и вентиль 31. При поступлении двух импульсов с головки Г2 (что характерно для этого случая) счетчик 26 обеспечивает запирание вентиля 31 и тем самым исключается цикл приведения в исходное положение ЦМД.
Приводим более подробное описание блока БУ 18. Его назначение в том, чтобы обеспечить последовательное управление процессом преобразования путем подачи сигналов управления на 19, 17 и 16 блоки.
Помимо главных операций блок управ- ления вырабатывает сигнал запрета выдачи новой информации в том, случае, когда ЦМД в исходном состоянии появляется между магнитными головками. БУ 13 работает следующим образом. Рассмотрим два возможных варианта работы. Первый, когда в исходном положении при срабатывании генераторов ЦМД между головками не образуется. В этом случае в процессе движения ЦМД первым появляется импульс на выходе первой головки. Он поступает на первый вход БУ 18 и устанавливает двухразрядный счетчик СТ 26 в нулевое состояние, т.е. на прямом выходе первого разряда О, а на инверсном выходе второго разряда будет - 1. По приходу импульса со второй головки на 2-й вход БУ 18 триггер Т27 срабатывает и открывается вентиль 28, а счетчик СТ 26 сосчитывает эту единицу (первый импульс), т.е. на прямом выходе 1-го разряда и инверсном выходе 2-го разряда будет установлена 1. По 3-му входу БУ 18 импульсы с генератора тактов проходят через вентиль 28 на счетчик 29, который закольцован и имеет три состояния О, 1 и 2. По приходу первого импульса счетчик 29 переходит в состояние 1 (единичного состояния) при этом на 1-м выходе дешифратора 30 появляется сигнал управляющий блоками „19 и 17, По приходе 2-го тактового импульса СТ29 переходит в следующее состояние (2) и при этом на втором выходе ДС 30 (выход БУ18) появляется сигнал, управляющий записью в 16, и одновременно появляется сигнал на выходе 3 БУ18, так как на вентиле 31 имеется разрешение от второго разряда СТ 26. По приходу третьего тактового импульса с-третьего выхода дешифратора приходит сигнал установки триггера Т27 в исходное состояние, запрещающее прохождение тактовых импульсов в СТ29, который остается в нулевом состоянии.
Второй вариант работы БУ 13. В процессе работы схема приводится в исходное положение сигналом с 3 выхода БУ18. При этом один из генераторов ЦМД может оказаться между головками П и Г2, и, следовательно, ЦМД, возникший в этом генераторе, 5 придет к головке Г2 раньше, чем следующий за ним ЦМД (возникший от последующего генератора). В этом случае с головки Г2 придут 2 импульса: один от первого ЦМД. который не должен участвовать в измерении, а
0 второй (участвующий в измерении) от последующего, который до этого фошел возле головки П. В этом случае первым приходит импульс с головка Г2 и все элементы БУ18 за исключением СТ26 рабо ают, как и в пер5 вом случае, обеспечивая передачу предыдущей информации на выход. Однако вентиль 31 будет закрыт, та: как в счетчике СТ26 после прибавления единицы число возрастает до двух. При этом на инверсном выхо0 де второго ра. фг-да СТ26 установится нулевой сигнал : згфета для вентиля 31. Поэтому не будет осуществляться приведение схемы в исхсдное состояние (генераторы ЦМД не рабо аю:). Далее по приходусигна5 ла с головки П БУ13 преобразователь работает так же как и з первом случае.
Расстояние N жду двумя соседними генераторами ЦМД должно быть больше, чем расстояние межд головками П и Г2. При
0 расп.оложечии д ух соседних ЦМД на расстоянии друг от .руга близком к расстоянию между гол вкам - быстродействие устройства возрастает, динамическая погрешность уменьшается, f/ги расстояния определяют5 ся технологии скими возможностями м/э техники). При величении расстояния можду соседними генераторами быстродействие уменьшается.
0 Технико-гхономический эффект от использования предлагаемого устройства можно подтвердить следующим рассуждением. Быстродействие преобразователя определяется высокой скоростью
5 продвижение ЦМД по траектории окружно сти. Скорость движения ЦМД может достигать /д 1400 м/с. Однако, на практике эт э скорость устанавливается порядка 100-6ГЭ м/с. При такой скорости и диаметре дис .а
0 носителя ЦМД 0 30 мм ЦМД может сов р- шать порядка 3000-6000 об/с, т.е. в обс.зо- тах в минуту п 180000-360000 об/гин. Поскольку ла круговой траектории перемещается не один, а несколько ЦМД, и даже
5 несколько десятков, то ясно, что за один оборот ЦМД можно сделать 10-100 измерений скорости. Например, при диаметре ЦМД dfl 2 мкм, диаметре диска носителя ЦМД О 30 мм и числе оборотов вращения ЦМД п 360000 об/мин, а также при числе
вращающихся доменов 100, можно произвести следующее количество измерений.
6 изм мин
пизм n m 360000 100 30-10Ь
6 10
изм с
(11)
Однако, для обеспечения высокой точности измерения скорости вращения вала эту величину снижают на 2-3 порядка. Таким образом, осуществляется пизм 6-103-6 102 измерений в секунду. Время одного измерения
tvi3M
. 1 1 1
Пизм б 102 6 103
0,2-2 мс(12) И это не предел, как видно из выражения (11). Надо отметить, что такое быстродействие обеспечивается в преобразователе циклического действия, который значительно проще и дешевле преобразователей считывания с кодовыми масками и оптическими устройствами считывания информации. Существующие датчики скорости, основанные на подсчете числа периодов (прототип).не могут соперничать по быстродействию с преобразователями на ЦМД, так как частоты (400-1000 Гц), на которых они работают на несколько порядков ниже частот, используемых в предлагаемом устройстве. На больших частотах, используемых в предлагаемом устройстве, массивные железные магнитопроводы ВТ будут перегреваться. Предлагаемый измеритель скорости работает с тактовой частотой
fr - 106Гц-107Гц 1-10 мгГц Малые габариты и вес измерителя угловых скоростей обеспечиваются за счет малых размеров ЦМД (1-5 мкм) и больших скоростей их движения. По этим же причинам преобразователя обеспечивают высокую точность (д 10-10 4%). Например, при носителе ЦМД с диаметром D 30 мм и диаметре ЦМД dfl 2 мкм. На окружности диска можно зафиксировать число положений домена.
пп.д.
ПД 103 3.14 -30 1000
dA мкм2 50000 положений Т.е. обеспечивается разрешающая способность в окружности, по которой
50 103
перемещается домен. При этом (D 30 мм) габариты преобразователя будут 50x50x20 мм При увеличении точности габариты растут, при уменьшении - уменьшаются.
Предлагаемые измерители скорости можно использовать в робототехнике, в автоматических электропроводах, при создании стабилизированных площадок, в устройствах управления телескопами, в машиностроении на прецизионных станках и в устройствах с программным управлением. Групповая технология современной микроэлектронной техники позволяет значительно уменьшить стоимость производства измерителей скорости при увеличении точ- ности и быстродействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МАГНИТНОЙ РЕДУКЦИИ И ПРЕОБРАЗОВАТЕЛЬ УГОЛ - КОД, РЕАЛИЗУЮЩИЙ ЕГО | 1994 |
|
RU2115228C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1997 |
|
RU2137296C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПУТИ И ЛИНЕЙНОЙ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА В КОД | 2012 |
|
RU2516382C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА, УГЛОВОЙ СКОРОСТИ И УГЛОВОГО УСКОРЕНИЯ ВАЛА В КОД | 2004 |
|
RU2280322C1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1410273A1 |
| ИЗМЕРИТЕЛЬ ЛИНЕЙНОЙ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА | 2010 |
|
RU2441245C2 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1280700A1 |
| ИЗМЕРИТЕЛЬ УГЛОВОГО УСКОРЕНИЯ ВАЛА | 2003 |
|
RU2253120C1 |
| Доменный аналого-цифровой преобразователь | 1982 |
|
SU1172012A1 |
| Магнитный аналого-цифровой преобразователь | 1985 |
|
SU1309082A1 |
Формула изобретения Преобразователь угловой скорости вала в код, содержащий датчик, первый и второй выходы которого соединены с входами соответственно первого и второго формирователей импульсов, генератор импульсов, счетчик импульсов, регистр и сумматор, о т- л и ч а ю щ и и с я тем, что, с целью повышения быстродействия, упрощения и уменьшения веса и габаритов преобразователя, в него введены блок управления, преобразователь кода, элемент задержки, задатчик кода константы, ключ и формирователь временного интервала, а датчик выполнен в виде неподвижного с кольцевой дорожкой пермаллоевых аппликаций, под которыми с постоянным шагом размещены соединенные последовательно генераторы цилиндрических магнитных доменов, кольцевой аннигилятор, который включен последовательное генераторами цилиндрических магнитных доменов, неподвижного установленного соосно с диском формирователя по ля смещения, блока формирования вращающегося магнитного поля и установленного на входном валу Г-образного кронштейна, на котором размещены головки считывания, выходы которых являются выходами датчика,.выходы первого и второго формирователей импульсов соединены с первым и вторым входами блока управления и с входами формирователя временного интервала, выход которого соединен с управляющим входом ключа, информационный вход которого подключен к выходу генератора импульсов, а выход соединен со счетным входом счетчика импульсов, вход обнуления которого подключен к выходу первого формирователя импульсов, а выходы соединены с информационными входами преобразователя кода, выходы которого соединены с первой группой информациейных входов сумматора, вторая группа информационных входов которого подключена к выходу задатчика кода константы, выход генератора импульсов соединен с входом блока формирования вращающегося поля и с третьим входом блока управления, четвертый вход которого является входом запуска преобразователя, а первый выход соединен с управляющим входом преобразователя кода и через элемент задержки подключен к управляющему входу суммато Фиг./
ра, выходы которого соединены с информационными входами регистра, выходы которого являются информационными выходами преобразователя, второй выход блока управления соединен с управляющим входом регистра и является синхронизирующим выходом преобразователя, третий выход блока управления соединен с входом первого генератора цилиндрических магнитных доменов, выход аннигилятора соединен с шиной нулевого потенциала,
