Изобретение относится к контрольно- измерительной технике и может быть использовано для обнаружения дефектов, например, грунтовочного покрытия на поверхностях цилиндрической и шарообразной формы..
Целью изобретения является повышение производительности.
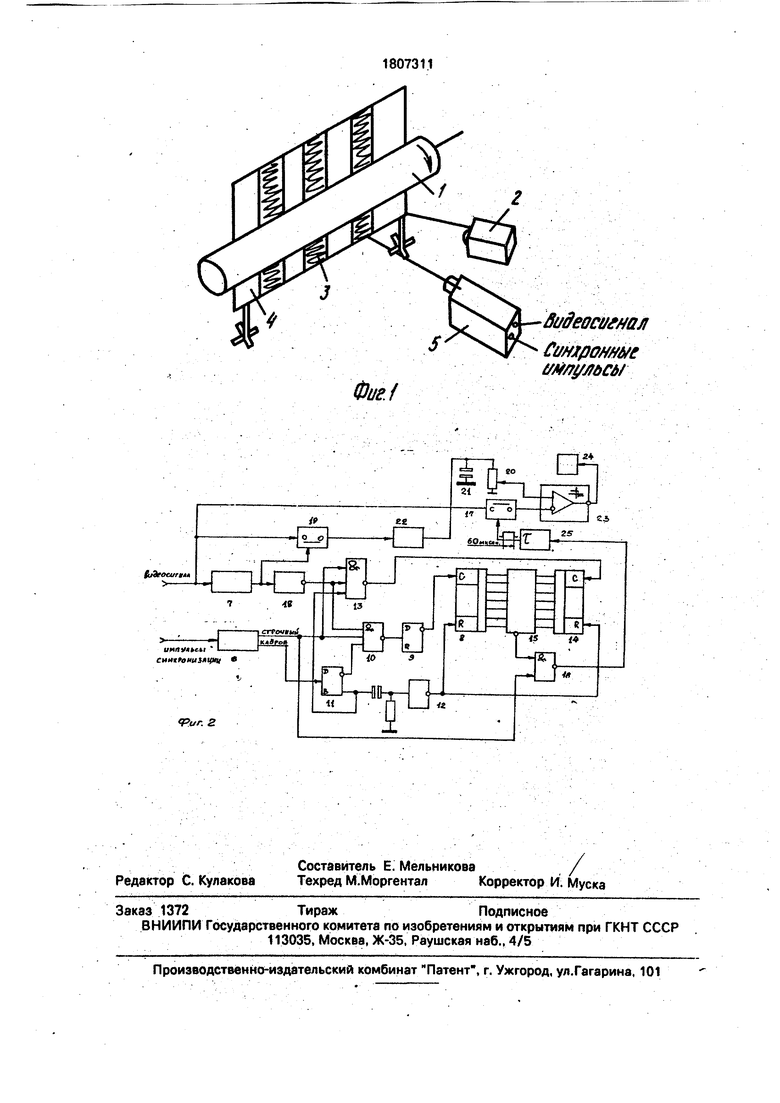
На фиг. 1 изображена схема расположения элементов устройства для выполнения способа; на фиг. 2 - блок-схема конкретного устройства для осуществления способа.
На фиг. 1 представлена труба 1, покрытая грунтовкой и освещаемая источником 2 света. За трубой 1 по отношению к источнику 2 света располагают экранный отражатель 3 света с калиброванными по отражательной способности полосами 4. Телекамера 5 расположена под углом к источнику 2 света в одной либо горизонтальной, либо вертикальной (на фигурах не показано) плоскости с ориентацией строк ее вдоль образующей трубы 1. Телекамера 5 имеет два выхода, один из которых соединен с селектором 6 синхроимпульсов, а другой выход видеосигнала - с детектором 7. Селектор 6 имеет два выхода, один из которых соединен со счетным входом регистра 8 через D-триггер 9 и трехвходрвый логический элемент И 10, а другой - со сбрасывающим входом регистра 8 через D-триггер 11 и инвертор 12, через динамическую RC-цепочку. Инвертирующий выход D-триггера 11 соединен с вторым входом трехвходового элемента И 10. Неинвертирующий выход D-триггера 11 соединен с одним из входов трехвходового элемента И 13, выход которого соединен со счетным входом регистра 14.
00
о
х|
СО
Сбрасывающие входы регистров 8 и 14 соединены с выходом логического элемента И 12. Выходы регистров 8 и 14 соединены с детектором 15 совпадения, выход последнего соединен с одним из входом двухвходо- вого элемента И 16, другой вход которого соединен со строчным выходом селектора 6, а выход - с управляющим бходом коммутатора 17. Выход детектора 7 соединен с инвертором 18, выход которого одновременно соединен с вторым входом элемента И 13, первый вход которого соединен со строчным выходом селектора 6. Кроме того, выход детектора 7 соединен с управляющим входом коммутатора 19. Сигнальный вход коммутатора 19 соединен с видеосигнальным выходом камеры 5. Вход детектора 7 соединен с регулировочным резистором 20 через накопительный конденсатор 21 и детектор 22. Видеовыход телекамеры 5 соединен с сигнальным входом коммутатора 17, сигнальный выход которого соединен с инвертирующим входом компаратора 23, а инвертирующий вход последнего соединен с движком регулировочного резистора 20. Выход компаратора 23 соединен с управлением исполнительного механизма 24. Вы- 5сод двухвходового элемента И 16 соединен с управляющим входом коммутатора 17 через расширитель 25 импульсов.
Обнаружение дефектов грунтовочного покрытия происходит следующим образом.
Источником 2 света освещают поверхность трубы 1 на фоне экранного отражателя 3 света с калиброванными по отражательной способности полосами. Отраженные от поверхности трубы 1 и отражателя 3 лучи света попадают в телекамеру 5 в поле зрения электронно-лучевой трубки (на фигурах, не показана). На видеовыходе телекамеры 5 появляется сигнал, в составе которого в начале кадра имеется информация в виде прямоугольных импульсов (типа меандр), наличие которых объясняется прохождением строк, изображающих поверхность экранного отражателя 3. Эти сигналы поступают в детектор 7, на выходе которого во время прохождения сигнала меандр устанавливается логический уровень 1, при атом включается коммутатор 19 и соединяет видеосигнальный выход телекамеры 5 с входом амплитудного детектора 22. На выходе детектора 22 устанавливается уровень напряжения, пропорциональный амплитуде сигнала меандр и пропорциональный чувствительности телевизионной камеры 5. Часть этого напряжения, снимаемого с переменного резистора 20, является опорным для компаратора 24. Интегрирующая цепочка, образованная внутренним сопротивлением детектора 22 и конденсатора 21, сохраняет амплитуду опорного напряжения в течение
всего кадра. При переходе луча с поля экрана на поверхность трубы логическая 1 с детектора переходит в нулевое состояние и поступает в инвертор 18, на выходе которого устанавливается логическая 1. Этот
0 сигнал поступает на один из входов трехвходового логического элемента И 13.
С второго выхода телекамеры 5 проходят синхроимпульсы, которые в селекторе 6 разделяются на строчные и кадровые им5 пульсы. Строчные импульсы положительной полярности поступают одновременно на вход трехвходового логического элемента И 1.0 и на вход трехвходового элемента И 13. При этом кадровые импульсы селектора 6
0 (также положительной полярности) поступают на Оттриггер 11, который подключается через свои инвертирующие и неинвертирующие выходы, поочередно разрешая прохождение строчных импульсов через
5 логические элементы И 13 и 10 при условии, что на выходе инвертора 18 также логическая Г, т.е. Проходят строки, имеющие ин- ъ формацию, соответствующую только отражению от поверхности трубы.
0 с выхода элемента И 10 строчные импульсы попадают на р-триггер 9, который делит количество строчных импульсов на два. В процессе пробегания трубы лучом от верхней до нижней кромки в регистр 8 по5 ступают только четные (или нечетные) строчные импульсы, которые суммируются и запоминаются в регистре 8. В следующем, втором полупериоде D-триггер 11 переключается в новое положение и строчные им0 пульсы, также отражающие состояние поверхности трубы, поступают на счетный вход регистра 14. Информация о числе строк, хранящаяся в регистре 8, поступает вместе с информацией из регистра 14 в де5 тектор 15 совпадения для сравнения. При равенстве чисел в обоих регистрах 8 и 14 на выходе из детектора 15 совпадения появляется логическая 1я, поступающая в элемент И16. Строчный синхроимпульс проходит че0 рез элемент И 16 только в том случае, если из детектора 15 совпадения в него поступила логическая Г, а затем этот синхроимпульс определяет опорную строку, соответствующую центру трубы 1. Этот им5 пульс поступает на расширитель 25 импульсов, который в момент окончания действия сигнала синхроимпульса подключает через коммутатор 17 на время, равное ходу строки (около 60 мкс) инвертирующий вход компа- ратора 23 к видеовыходу телекамеры 5. В
момент прохождения опорной строки в компараторе происходит сравнение уровня сигнала с опорным сигналом в течение всей строки. В случае, если на поверхности трубы нет праймера. на выходе компаратора 23 появляется О и включается исполнительный механизм 24, бракующий трубу.
По окончании второго полукадра следующий кадровый импульс переводит О-триг- гер 11 в исходное состояние, при этом срабатывают входы регистров 8 и 14, соединенные с выходом логического элемента И 12.
Передний фронт импульса на неинвертирующем выходе D-триггера 11 через динамическую RC-цепочку и инвертор 12 производит срабатывание регистров 8 и 14 на О.
Если на поверхности трубы нет дефектов праймера, на выходе из компаратора 23 появляется 1 и в исполнительный механизм 24 не поступает никаких сигналов, при этом процесс контроля поверхности трубы продолжается.
Описанный способ позволяет автоматически обнаруживать дефекты грунтовочного покрытия и автоматически их отбраковывать, исключает погрешности в выбраковке изделий из-за загрязнений оптических систем осветителя и телекамеры. Кроме того, способ позволяет повысить производительность контроля да счёт его непрерывности, обеспечивая высокую надежность и достоверность обнаружения дефектов.
Формула изобретения
1. Способ обнаружения дефектов обработки и покрытий цилиндрических изделий, заключающийся в освещении боковой поверхности изделия и анализе данных обзора, о т л и ч а ю щи и с я тем, что, с целью повышения производительности, формируют в плоскости анализа изображения отражающего фона и изображение изделия в положении, когда его ось параллельна строкам развертки в плоскости анализа, при
развертке изображения анализируют полученный видеосигнал и формируют пороговый сигнал, пропорциональный амплитуде видеосигнала оси фона, выделяют контроль- 5 ную строку, совпадающую с изображением образующей изделия, лежащей в плоскости его диаметрального сечения, перпендикулярной плоскости анализа, анализируют видеосигнал от контрольной строки, а о
0 дефекте судят по отклонению амплитуды сигнала контрольной строки от порогового сигнала.
2. Способ по п.1,отличающийся тем, что, с целью повышения точности, фор5 мируютфон в виде калиброванных по отражающей способности полос, направление которых перпендикулярно строкам развер- тки. и видеосигнал от них используют в ка- , честве порогового сигнала.
0 3. Способ попп.1 и 2, от л ича ю щи й- с я тем, что, с целью повышения точности при периодическом поперечном смещении изделия, из видеосигнала выделяют опорную строку, соответствующую верхней образу5 ющей изображения изделия, и фиксируют номер строки, а номер контрольной строки определяют отсчетом от номера опорной . строки, фиксированного для каждого диаметра изделия числа строк.
0 4. Способ по пп.1 и 2, от л ича ю щи й- с я тем, что, с целью повышения точности при периодическом поперечном смещении изделия и повышения производительности за счет автоматического определения и от5 счета фиксированного числа строк, освети-, тель и приемник располагают в плоскости диаметрального сечения изделия, выделяют номер опорной строки, затем выделяют из того же кадра номер строки, определяющей
0 нижнюю образующую изображения изделия, и определяют номер контрольной строки как половину разницы между номерами строк, а выделение самой контрольной строки по полученному номеру производят в по5 следующем, кадре.
Фие.{
Зийеоя/мал
Симромб/с умдушы
Изобретение относится к контрольно- измерительной технике, Целью изобретения является повышение производительности и точности. Способ заключается в освещении поверхности вращаемой трубы осветителем и получении данных о сплошности грунтовочного слоя. Освещение ведут с получением освещенной поверхности размещенного позади нее экранного отражателя света посредством направленной на трубу телекамеры с ориентацией строк последней вдоль образующей трубы, при этом сигнал контрольной строки анализируют в компараторе по амплитуде в сравнении с заданным порогом с выдачей импульса на управление блокирующему устройству в случае превышения сигналом пороговой величины. 3 э.п. ф лы, 2 ил. ё
(иЭеасигп
||ИЛУ4 Ј 1
CHH tonut 4ntt
| Способ обнаружения дефектов поверхности | 1986 |
|
SU1388725A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гальперин А.И | |||
| Строительно-монтажные машины | |||
| - М.: Недра, 1982, с | |||
| Аппарат для передачи фотографических изображений на расстояние | 1920 |
|
SU170A1 |
