Изобретение относится к автоматике и вычислительной технике и может быть использовано для контроля перемещения.
Цель изобретения - повышение точности устройства путем получения гистерезис- ной выходной характеристики с ярко выраженными точками равенства их индук- тивностей, о прохождении которых устройство выдает сигналы, отличающиеся в зависимости от направления движения.
Цель достигается тем, что в устройство для измерения параметров линейного перемещения, содержащее неподвижный П-образный сердечник, на среднем стержне которого размещена катушка индуктивности, подключенный к генератору переменного напряжения, связанный с контролируемым объектом подвижный элемент, в него дополнительно введены три неподвижных П-образных сердечника, на средних стержнях каждого из которых размещены катушки индуктивности, при этом П-образные сердечники установлены вдоль направления движения подвижного элемента дискообразной формы, торцовые поверхности боковых стержней П-образных
сердечников расположены в плоскости параллельной плоскости перемещения подвижного элемента, катушки индуктивности подключены через последовательно подсоединенные резисторы к генератору переменного напряжения параллельно, а блок обработки сигналов с чувствительных элементов выполнен в виде двухплечевой схемы, каждое из плеч которой состоит из последовательно соединенных инвертора, сумматора, усилителя-ограничителя, умножителя и интегратора, выходы которых подключены к двум входам триггера Шмитта, выход которого является выходом устройства, при этом выходы первой и третьей катушек индуктивности подключены соответственно к первому и второму инверторам, выходы второй и четвертой - к вторым входам первого и второго сумматоров соответственно, а объединенные входы катушек индуктивности - к входу генератора опорного напряжения, выход которого подключен ко входу третьего усилителя-ограничителя, первый выход которого соединен со вторым входом первого умножителя, а второй - со вторым входом второго умножителя.
ел
с
00
--А
ю ел о со
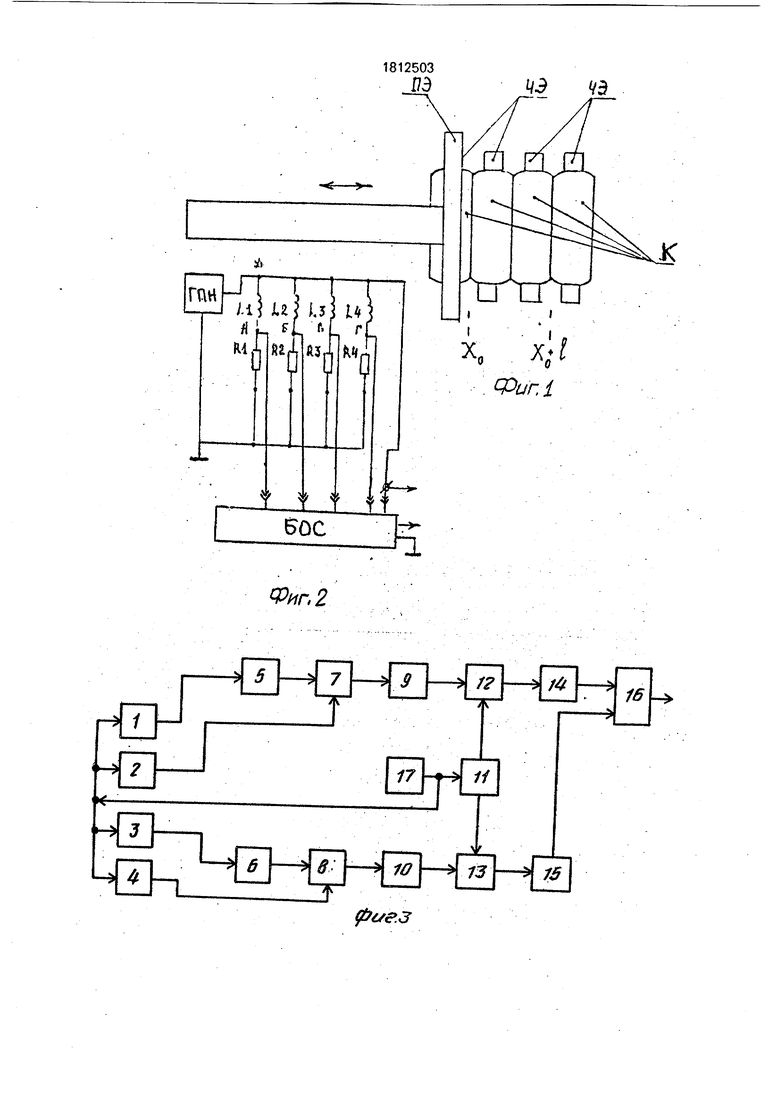
Конструкция устройства для измерения параметров линейного перемещения приведена на фиг. Т, которая состоит из подвижного элемента ПЭ дискообразной формы, четырех одинаковых чувствительных элементов ЧЭ с одинаковыми обмотками К.
Электрическая схема соединений чувствительных элементов приведена на фиг. 2. Катушки индуктивности Li, п. 1з. U подключены через последовательно подсоединенные резисторы Ri, R2, R3. R4 к генератору переменного напряжения (ГПН) параллельно, выходные сигналы с чувствительных элементов в виде изменения их индуктивностей снимаются с точек А, Б, В, Г, Д и поступают в блок обработки сигналов (БОС).
Функциональная схема устройства для измерения параметров линейяого перемещения приведена на фиг. 3.
Устройство содержит чувствительные элементы 1-4, подключенные через последовательно подсоединенные резисторы к генератору переменного напряжения параллельно (фиг. 3 - не приведены).
- Блок обработки сигналов с чувствительных элементов 1-4 выполнен в виде двух- плечевой схемы, каждое из плеч которой состоит из последовательно соединенных инверторов 5, б, сумматоров 7, 8, усилителей-ограничителей 9, 10, 1.1, умножителей 12, 13 и интеграторов 14, 15, выходы которых подключены к входам триггера Шмит- та 16, выход которого является выходом устройства, при этом выходы первой и третьей катушек индуктивности подключены соответственно, к первому 5 и второму б инверторам, выходы второй и четвертой
- к вторым входам первого 7 и второго 8 сумматоров соответственно, а объединенные входы катушек индуктивности - к входу генератора опорного напряжения 17, выход которого подключен ко.входу третьего усилителя-ограничителя 11, первый выход которого соединен со вторым входом первого умножителя 12, а второй - со вторым входом второго умножителя 13 (фиг. 3).
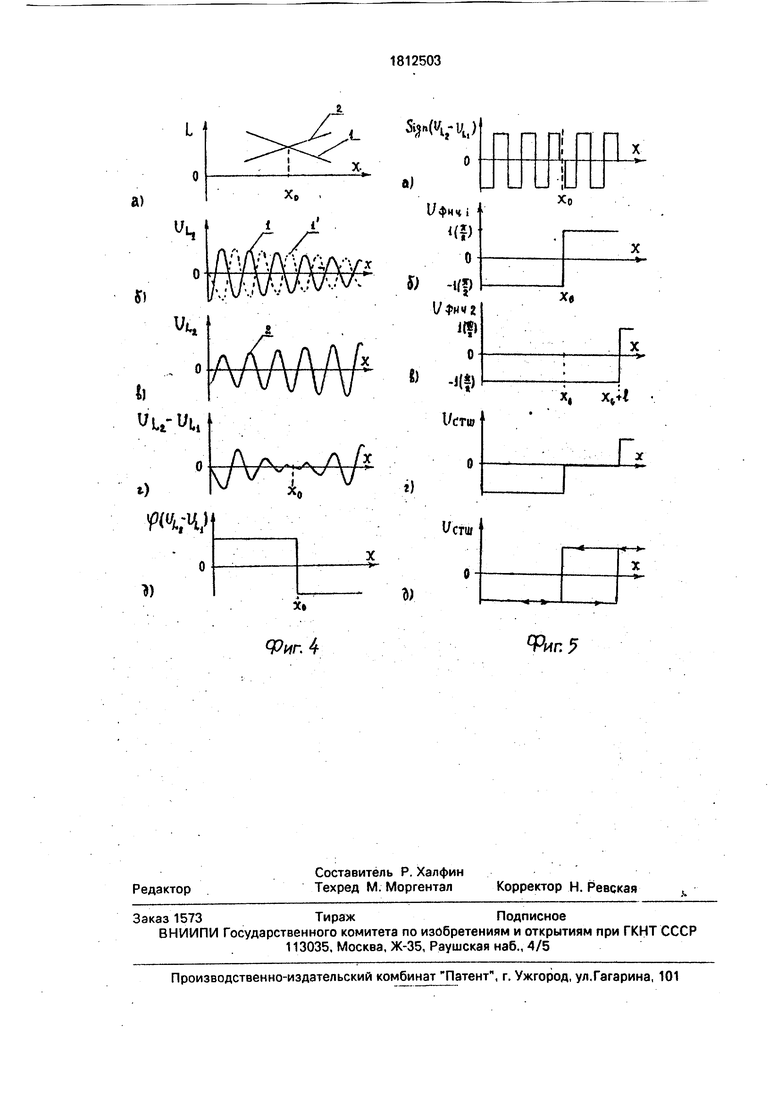
На фиг. 4а приведены графики изменения индуктивностей на чувствительных элементах 1-2 в зависимости от перемещения подвижного элемента устройства, с точкой равенства их индуктивностей - х0 (графики изменения индуктивностей вторых пар чувствительных элементов 3-4 с точкой равенства их индуктивностей - хо +1, не приведены); 46 -- пунктиром показан инвертированный сигнал с первого чувствительного элемента, 4в - изменение индук- тивности на втором чувствительном
элементе в зависимости от перемещения подвижного элемента устройства; 4г - разностный сигнал на выходе сумматора 7; 4д - сигнал на выходе усилителя-ограничителя 9.
На фиг. 5а, б приведены релейные характеристики изменения фазы напряжения разностного сигнала относительно координаты сигнальной точки Хо,1 5в - то же, относительно координаты сигнальной точки хо +1; 5г - суммарный сигнал из двух пар чувствительных элементов на суммирующем триггере Шмитта; 5д - выходной сигнал устройства.
Устройство работает следующим образом.
Сигнальные информации содержатся в изменениях индуктивностей чувствительных элементов, вследствие чего изменяются
амплитуды переменных сигналов на них от питающего генератора.
При таком способе кодирования перемещений подвижного элемента устройства изменение параметров сигнальной
информации переменного тока (амплитуда, частота, фаза) наиболее целесообразно осуществлять по изменению амплитуды и фазы. Получение сигнальной информации только по амплитуде аппаратурно сложно и
не позволяет достичь требуемой точности.
Сигнальная информация, полученная
по изменению фазы (наиболее точная на
сегодняшний день), проста в аппаратурном
исполнений и широко распространена в информационно-преобразовательных системах.
При перемещении подвижного элемента устройства 1 (фиг. 1) вперед или назад изменяются индуктивности чувствительных
элементов 2 L.1-U (фиг. 2), вследствие этого изменяются амплитуды переменного сигнала на них, эапитываемых от генератора опорного напряжения, Выходные сигналы с чувствительных элементов имеют особенно сти, заключающиеся в том, что имеются две сигнальные точки Хо и х0 + I для каждой из двух пар чувствительных элементов, где индуктивность парвого чувствительного элемента равна индуктивности второго
чувствительного элемента (фиг. 4а) (приводится график только для сигнальной точки Хо).
Причем выходные характеристики устройства, характеризующие первую пару
чувствительных элементов, такие, что при
увеличении индуктивности на втором чувстг
вительном элементе индуктивность первого
чувствительного элемента уменьшается
(фиг. 4а, перемещение вперед).
Аналогичные характеристики имеют вторые пары чувствительных элементов, отличающихся расстоянием I, отстоящим от точки Хо.. .
Блок обработки сигналов с чувствитель- ных элементов выполнен в виде двухплече- вой схемы, причем количество и элементы первого плеча идентичны количеству и элементам второго плеча.
При перемещении подвижного элемента 1 (фиг. 1) датчика вперед (или назад) появляются сигналы на выходах чувствительных элементов Li, и , Ц.
Сигнал с чувствительного элемента Li поступает в ин вертор 5 пер вого плеча схемы (фиг. 46, 1), выход которого соединен первым входом сумматора 7, на второй вход которого поступает сигнал со второго чувствительного элемента LZ (фиг. 4в). На выходе сумматора 7 получаем разностный сигнал (фиг. 4г), в котором относительно сигнальной точки х0 происходит изменение величины амплитуды и фазы сигнала, который поступает в усилитель-ограничитель 9, с выхода которого получаем сигнальную инфор- мацию прямоугольной формы, в котором относительно точки хо происходит изменение фазы сигнала на 180° (фиг. 4д).
Аналогично обрабатываются сигналы с чувствительных элементов La, U в узлах: инвертор 6. сумматор 8, усилитель-ограничитель 10, отличающихся лишь расстоянием I, отстоящих от х0, где происходит смена фазы сигнала.
Сигналы с чувствительных элементов LI. с выхода усилителя-ограничителя 9 первого плеча схемы поступают на первый вход умножителя 12, на второй вход которого подается опорное напряжение генератора 17, прошедшее через усили- тель-ограничитель 11 и преобразовательное в прямоугольную форму.
Аналогично преобразуются сигналы с чувствительных элементов , U с выхода усилителя-ограничителя 10 второго плеча схемы, поступающие на первый вход перемножителя 13, на второй вход которого подается опорное напряжение генератора 17, прошедшее через усилитель-ограничитель 11 и преобразованное в прямоугольную форму.
При получении сигнальной информации по изменению фазы сигнала наиболее точным считается знаковый метод. Знаковая функция корреляции при полной тождест- венности двух сигналов имеет максимально положительное значение, равное плюс единице, т.е. два сигнала, рассматриваемые в устройстве для измерения параметров линейного перемещения, от первой пары (или
второй) чувствительных элементов устройства - синфазны. И наоборот, когда противоположны, то имеет максимальное отрицательное значение, равное минус единице, т.е. сигналы противофазны.
Общий алгоритм формирования выходной гистерезисной характеристики основан на вычислении двух интегралов, которые в сумме дают релейную характеристику сигнала:
ивых / SignfUA sin u) t-Us sin (a) t ± % x
х51дп Цц -sln ftrt)}dt + / SignfUe sin (a t-Ur x
. о
xsin(o t ± TJf) sin ft) tjjdt,
где UA, UB. UB, Ur, Уд - амплитуда сигнала в точках А, Б, В, Г, Д (фиг. 2) чувствительных элементов датчика;
Sign - операция клиппирования (умножение на бесконечный коэффициент усиления и ограничения);
simut - сигнал с опорного генератора;
±-п - информационный параметр схемы;
t - текущее время;
Т- время интегрирования.
После выполнения операции свертки, вычисления корреляционного интервала, вычисления среднего значения сдвига фаз, т.е. умножения сигнала с опорного генератора 17, снимаемого с выхода усилителя-ограничителя 11, в перемножителе 12 на разностный сигнал от чувствительных элементов 1, 2, снимаемый на выходе усилителя-ограничителя 9 и интегрирования в интеграторе 14, получаем релейную характеристику изменения фазы напряжения разностного сигнала (фиг. 5а, б) относительно координаты сигнальной точки хо подвижного элемента датчика.
Аналогично получаем релейную характеристику для координаты сигнальной точки х0 + I устройства умножением на перемножителе 13 (фиг, 3) сигнала опорного напряжения генератора 17, снимаемого с выхода усилителя-ограничителя 11, на разностной сигнал от второй пары чувствительных элементов 3,4, снимаемый с выхода усилителя- ограничителя 10, и интегрирования в интеграторе 15 (фиг, 5в),
Завершающим узлом формирования выходной гистерезисной характеристики устройства для измерения параметров линейного перемещения является суммирующий триггер Шмитта, который на своих двух входах запоминает направления перемещения подвижного элемента устройства, вперед или назад.
Узел кодировки сигнальной информации от первой пары чувствительных элементов фазу сигнала выполнен на операционном усилителе, например, 140 УД 8Б, имеющем два входа, один из которых инвертирующий, в котором осуществляется суммирование, усиление-ограничение и получение разностного сигнала.
Идеальный четырехквадратный умножитель первого плеча схемы, знаковый, выполняющий операцию свертки, реализован на операционном усилителе, например 140 УД 8Б, и на полевых транзисторах, например, КП ЗОЗГ, КП ЮЗЕ. Использование полевых транзисторов с разными проводимостями п- и р-типов (КП ЗОЗГ, КП 103Е) позволяет получить четырехквадрат- ное знаковое умножение.
Операцию текущего осреднения первого плеча схемы выполняет фильтр нижних частот (интегратор), выполненный, например, на операционном усилителе 140 УД 8Б.
Аналогично реализован узел кодировки сигнальной информации от второй пары чувствительных элементов, содержащий второй перемножитель, второго плеча схемы и второй фильтр нижних частот (интегратор).
В качестве третьего усилителя-ограничителя сигнала с опорного генератора применен операционный усилитель, например, 140 УД 85.
Выходом фильтра нижних частот (интеграторы 14, 15) является сигнал, меняющий свою полярность с точностью 1/Ку, где Ку- коэффициент усиления операционного уси- .пителя,. в точках х о и х0 + I, что определяет точность устройства для измерения параметров линейного перемещения (фиг. 56, в).
Суммирующий триггер Шмитта реализован на операционном усилителе, например, 140 УД 8Б, который является элементом памяти по запоминанию направления перемещения подвижного узла устройства. На его входах формируются выходные релейные сигналы с фильтров нижних частот.
Сложение этих релейных сигналов позволяет получить трехуровневую входную функцию суммирующего триггера Шмитта (фиг. 5г)..
До тех пор, пока суммарный сигнал на входе суммирующего триггера Шмитта не яревысит противоположно расположенных опорных уровней переключения относительно точек Хо и Хо + I, суммирующий триггер Шмитта находится в одном из устойчивых положений, т.е. помнит свое предыдущее состояние, а в приложении к
чувствительному элементу это направление движения вперед (или назад) подвижного элемента (фиг. 5д).
Выходная гистерезисная характеристика устройства приведена на фиг. 5д.
0 Экономический эффект от использования изобретения обусловлен его техническими особенностями, приведенными выше.
Ф о о м у л а и. з о б р е т е н и я
5 Устройство для измерения параметров . линейного перемещения, содержащее неподвижный П-образный сердечник, на среднем стержне которого размещена катушка индуктивности, подключенная к генератору
0 переменного напряжения, связанный с кон- тролируемым.объектом подвижный сердечник прямоугольного сечения, ширина которого равна ширине стержней П-образ- ного сердечника, и блок обработки сигнала,
5 отличающееся тем, что, с целью повышения точности, в него дополнительно введены три неподвижных П-образных сердечника, на средних стержнях каждого из которых размещены катушки индуктивно0 сти, при этом П-образные сердечники установлены вдоль траектории движения подвижного сердечника, торцовые поверхности боковых стержней П-образных сердечников расположены в плоскости,
5 параллельной плоскости перемещения подвижного сердечника, высота которого равна высоте П-образных сердечников, катушки индуктивности подключены через последовательно подсоединенные резисто0 ры к генератору переменного напряжения параллельно, а блок обработки сигйала выполнен в виде двухплечевой схемы, каждое из плеч которой состоит из последовательно соединенных инвертора, сумматора, усили5 теля-ограничителя, умножителя и инвертора, выходы которых подключены к входам триггера Шмитта, выход которого является выходом устройства, при этом выходы первой и второй катушек индуктивности под0 ключены соответственно к первому и второму инверторам, выходы второй и четвертой - к вторым входам первого и второго сумматоров соответственно, а объединенные входы катушек индуктивности - к входу
5 генератора опорного напряжения, выход которого подключен к входу третьего усилителя-ограничителя, первый выход которого связан с вторым входом первого умножителя, а второй - с вторым входом второго умножителя.
Г бос
1
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХТАКТНЫЙ ТРАНЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2008 |
|
RU2367081C1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2014 |
|
RU2549360C1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ | 2014 |
|
RU2565362C1 |
| Устройство для измерения величины и угла дисбаланса изделий | 1981 |
|
SU974172A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2005 |
|
RU2279094C1 |
| Доплеровский ультразвуковой локатор | 1982 |
|
SU1166790A1 |
| Устройство для моделирования сухого трения | 1983 |
|
SU1103251A1 |
| Устройство для выделения признаков при распознавании образов | 1987 |
|
SU1583945A1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2460225C1 |
| Устройство для формирования сигнала | 1980 |
|
SU921058A1 |
Сущность изобретения: устройство содержит четыре подключенных к генератору переменного напряжения чувствительных элемента, два инвертора, два сумматора, три усилителя-ограничителя, два умножителя, два интегратора, триггер Шмидта, генератор опорного напряжения. 5 ил.
Ф//л2.
J
| Фотоэлектрический преобразователь перемещения в фазовый сдвиг сигнала | 1977 |
|
SU623103A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Индукционный датчик линейных перемещений | 1960 |
|
SU144034A1 |
