Изобретение относится к оптико-механической промышленности, а более конкретно устройствам для контроля положения линзы Френеля в зеркальной фотокамере в условиях конвейерной сборки фотоаппаратов.
Цель изобретения - повышение точности контроля.
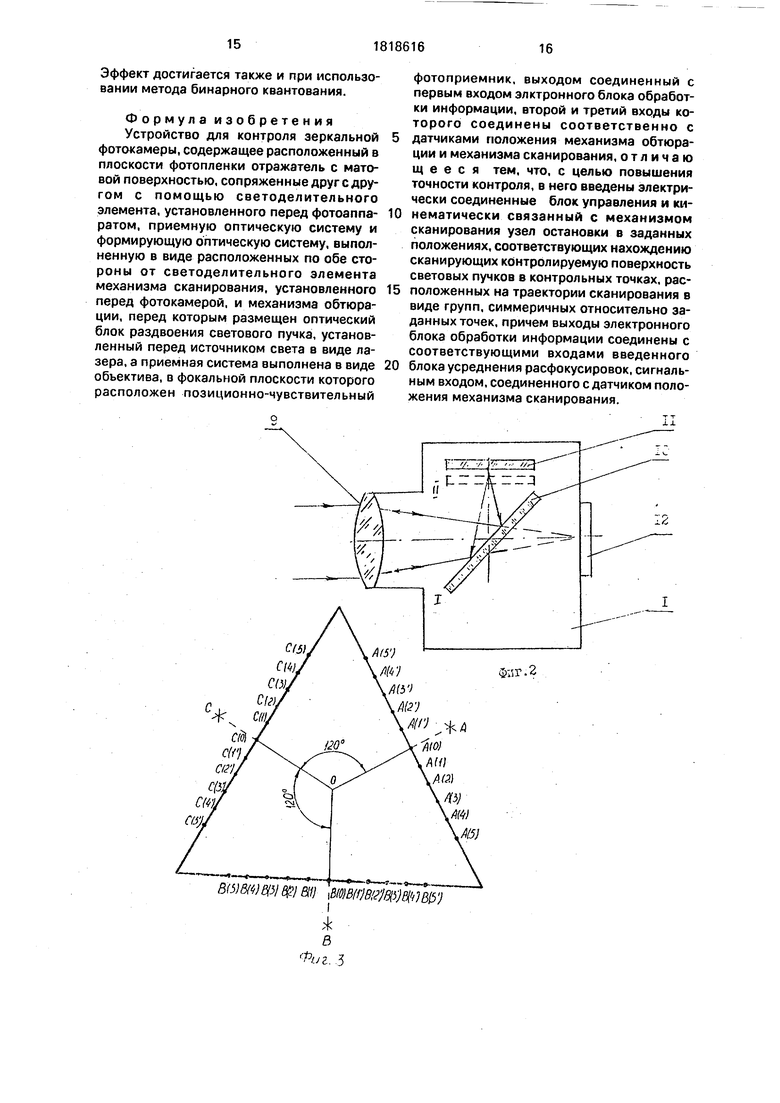
На фиг.1 изображена функциональная схема устройства контроля; на фиг.2 - ход лучей при различных положениях зеркала фотокамеры; на фиг.З - пример расположения контрольных точек на одной из сканируемых плоскостей; на фиг.4 - схематическое изображение процесса пространственного усреднения расфокусировок; на фмг.5 - укрупненный алгоритм функционирования устройства; на фиг.6. - функциональная схема блока усреднения расфокусировок; на фиг.7 - блок-схема варианта технической реализации блока усреднения расфокусировок; на фиг.8 - функциональная схема варианта технической реализации элементов сканирования.
Устройство для контроля зеркальной фотокамеры 1 (фиг.1 и 2) содержит формирующую оптическую систему в виде источника светолазера 2, оптического блока раздвоения светового луча 3, механизма обтюрации 4 с датчиком его положения 5, механизма сканирования 6, связанного механически с узлом остановки в заданных положениях 7 и датчиком положения 8, связанным с механизмом сканирования 6, Контролируемая фотокамера 1 с объективом 9, зеркалом 10 и линзой Френеля 11 располагается между механизмом сканирования 6 и отражателем 12 с матовой отражающей поверхностью, В состав приемной и формирующей оптических систем входит также светоделитель- ный элемент 13, причем приемная оптическая система содержит обьектив 14, в фокальной плоскости которого расположен позиционно-чувствительный фотоприемник 15, связанный своим выходом с первым входом 16 электронного блока обработки информации 17, второй и третий входы которого 18 и 19 соединены с датчиками положений 8 и 5. В состав электронной схемы устройства входят также блок управления механизмом сканирования 20, связанный электрически посредством группы выходов 21 с узлом остановки в заданных положениях 7 и блок усреднения расфокусировок 22, связанный своей группой входов 23 с группой выходов 24 электронного блока обработки информации 17, а своим сигнальным входом 25 с датчиком положения 8 механизма сканирования 6.
Световой пучок от лазера 2 делится оптическим блоком 3 на два параллельных пучка, направленных на объектив 9 фотокамеры 1, далее эти пучки, пройдя механизм обтюрации 4 и сканирования 6. управляемого, в свою очередь, узлом остановки в заданных положениях 7, попадают в объектив 9 фотокамеры 1. В результате на отражателе 12 (при зеркале
фотокамеры 10 положение II на фиг.2) или на линзе Френеля 11 (положение I на фиг.2) при опущенном зеркале 10 сформируются поочередно два светоых пятна. Вследствие диффузного отражения от матовой поверхности сканируемой плоскости (12 или 11) образуются световые пучки лучей, направленные обратно к объективу 9 фотокамеры 1, которые проходят его в обратном направлении и, пройдя механизм сканирования 6,
светоделительный элемент 13, попадают в объектив 14 приемной оптической системы, который формирует в фокальной плоскости на позиционно-чувствительном фотоприемнике 15 изображения световых штрихов,
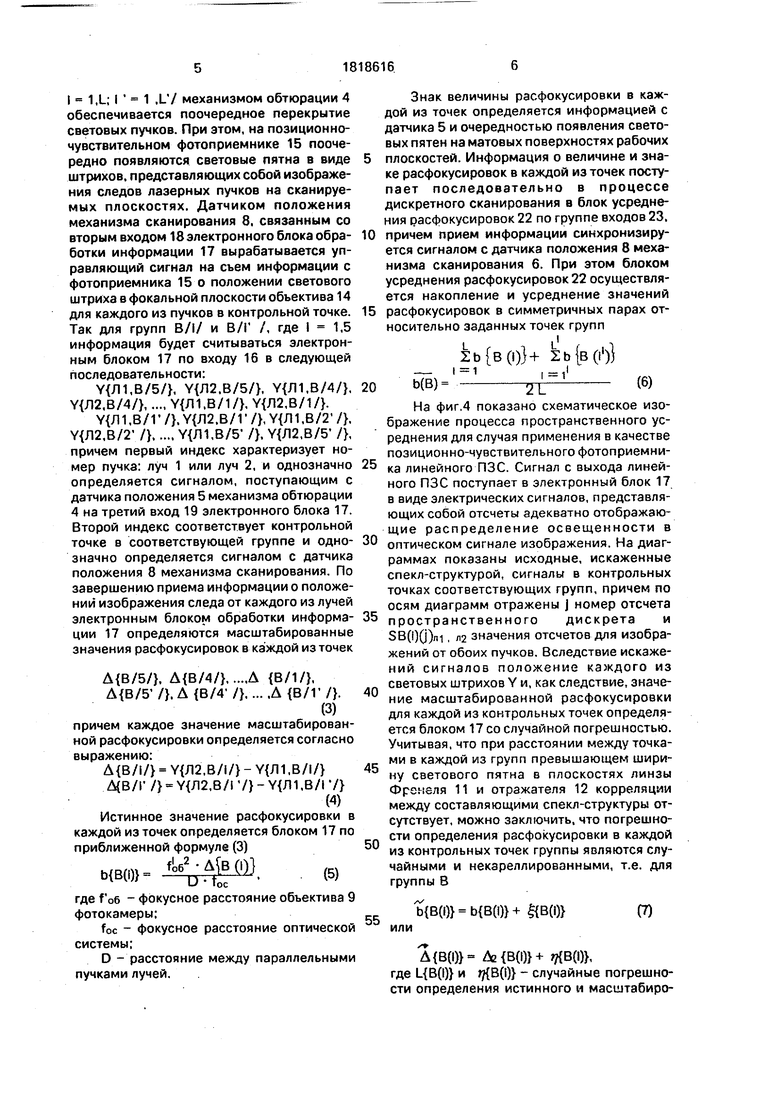
Простейший случай расположения контрольных точек на одной из сканируемых плоскостей изображен на фиг.З. Траектория сканирования световых пучков представляет собой стороны равностороннего треугольника, причем перпендикулярны опущенные из центра траектории на соответствующую сторону треугольника являются одновремнно частями медиан треугольника и имеют на своем продолжении пересечение с органами юстировки А, В и С линзы Френеля в зеркальной фотокамере. Контрольные точки на траектории распо- ложены в виде групп симметричных относительно заданных точек А(0), В(0) и
С(0), лежащих на указанных направлениях.
В/L/. B/L-1/,.... В/1/, В/1/,..., /, В/L1 / A/LA A/L-1 /,..., А/1 /, А/1 /,.... АГ/1-1 /, А/L1 / C/U, C/L-1/,.... С/1/. С/1/,.... q/L-1/j, С/L1 / -(1)
где L - число контрольных точек в группе - для рассматриваемого примера L 5.
В процессе работы устройства механизм сканирования 6 (по фиг.1) перемещается дискретно под управлением узла остановки в заданных положениях, электрический режим работы которого (скорость- длительность перемещений, длительность остановок) определяется управляющими
сигналами, поступающими с группы выходов блока управления 20 механизма сканирования.
В момент остановок в каждой из контрольных точек соответствующей группы /А/1/, А/Г/, В/1/, В/Г /. С/1/, С/1 /. где
I 1,L; I 1 .LV механизмом обтюрации 4 обеспечивается поочередное перекрытие световых пучков. При этом, на позицией нечувствительном фотоприемнике 15 поочередно появляются световые пятна в виде штрихов, представляющих собой изображения следов лазерных пучков на сканируемых плоскостях. Датчиком положения механизма сканирования 8. связанным со вторым входом 18 электронного блока обра- ботки информации 17 вырабатывается управляющий сигнал на съем информации с фотоприемника 15 о положении светового штриха в фокальной плоскости объектива 14 для каждого из пучков в контрольной точке. Так для групп В/i/ и В/Г /, где I 1.5 информация будет считываться электронным блоком 17 по входу 16 в следующей последовательности:
У{Л1,В/5/}, У{Л2.В/5/}, У{Л1,В/4/}, У{Л2.В/4/},.... У{Л1,В/1/}, У{Л2,В/1/}.
У{Л1.В/Г/}.У{Л2.В/Г/},У{Л1,В/2 /}. У{Л2,В/2 /}. .... Ґ{Л1,В/5 /}. У{Л2,В/5 /}, причем первый индекс характеризует номер пучка: луч 1 или луч 2, и однозначно определяется сигналом, поступающим с датчика положения 5 механизма обтюрации 4 на третий вход 19 электронного блока 17. Второй индекс соответствует контрольной точке в соответствующей группе и одно- значно определяется сигналом с датчика положения 8 механизма сканирования. По завершению приема информации о положений изображения следа от каждого из лучей электронным блоком обработки информа- ции 17 определяются масштабированные значения расфокусировок в каждой из точек
Д{В/5/}. А{В/4/}, ....А {В/1/}.
Д{В/5 /}. Л {В/41 /}. ... .Д {В/Г /}.
(3)
причем каждое значение масштабированной расфокусировки определяется согласно выражению:
У{Л2, - У{Л 1 ,B/I/} Д(В/Г /} У{Л2,В/1 V} - У{Л 1.8/1 7}
(4)
Истинное значение расфокусировки в каждой из точек определяется блоком 17 по приближенной формуле (3)
b{B(i)}
fU2 Afc (I)
(5)
ТПос
где Гоб - фокусное расстояние объектива 9 фотокамеры;
foe - фокусное расстояние оптической системы;
D - расстояние между параллельными пучками лучей.
Знак величины расфокусировки в каждой из точек определяется информацией с датчика 5 и очередностью появления световых пятен на матовых поверхностях рабочих плоскостей. Информация о величине и знаке расфокусировок в каждой из точек посту- пает последовательно в процессе дискретного сканирования в блок усреднения расфокусировок 22 по группе входов 23. причем прием информации синхронизируется сигналом с датчика положения 8 механизма сканирования 6. При этом блоком усреднения расфокусировок 22 осуществляется накопление и усреднение значений расфокусировок в симметричных парах относительно заданных точек групп
2ь(в()}+ 2ь{в(| ))
Ь(В)
I 1
,м
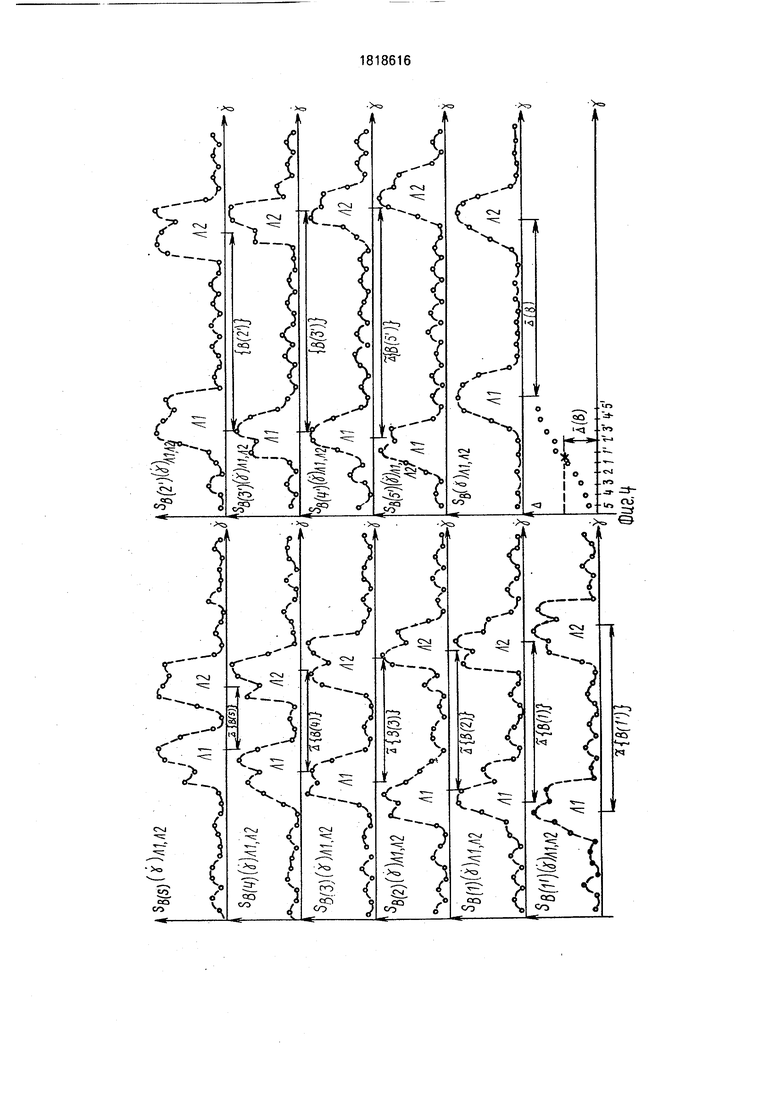
тг
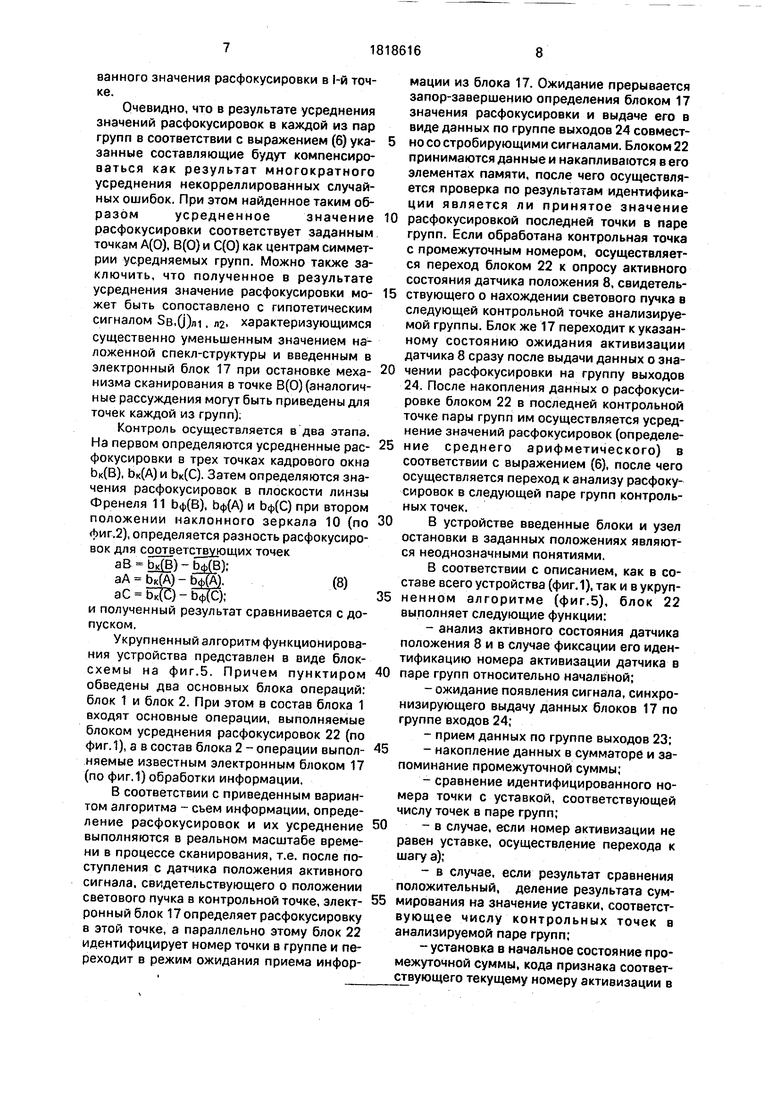
На фиг.4 показано схематическое изображение процесса пространственного усреднения для случая применения в качестве позиционно-чувствительного фотоприемника линейного ПЗС. Сигнал с выхода линейного ПЗС поступает в электронный блок 17 в виде электрических сигналов, представляющих собой отсчеты адекватно отображающие распределение освещенности в оптическом сигнале изображения. На диаграммах показаны исходные, искаженные спекл-структурой, сигналы в контрольных точках соответствующих групп, причем по осям диаграмм отражены j номер отсчета пространственного дискрета и 5В(1)()л1. л2 значения отсчетов для изображений от обоих пучков. Вследствие искажений сигналов положение каждого из световых штрихов Y и, как следствие, значение масштабированной расфокусировки для каждой из контрольных точек определяется блоком 17 со случайной погрешностью. Учитывая, что при расстоянии между точками в каждой из групп превышающем ширину светового пятна в плоскостях линзы Френеля 11 и отражателя 12 корреляции между составляющими спекл-структуры отсутствует, можно заключить, что погрешности определения расфокусировки в каждой из контрольных точек группы являются случайными и некареллированными, т.е. для группы В
55
b{B(i)} b{B(l)} + ЙВО)}
(7)
или
Д{В(1)}- Д2{В(1)}+ tfB(l)}, где ЦВ()} и $В()} - случайные погрешности определения истинного и масштабированного значения расфокусировки в 1-й точке.
Очевидно, что в результате усреднения значений расфокусировок в каждой из пар групп в соответствии с выражением (б) указанные составляющие будут компенсироваться как результат многократного усреднения некорреллированных случайных ошибок. При этом найденное таким образом усредненное значение расфокусировки соответствует заданным точкам А(0), В(0) и С(0) как центрам симметрии усредняемых групп. Можно также заключить, что полученное в результате усреднения значение расфокусировки может быть сопоставлено с гипотетическим сигналом 5в,0)л1. л2- характеризующимся существенно уменьшенным значением наложенной спекл-структуры и введенным в электронный блок 17 при остановке механизма сканирования в точке В(0) (аналогичные рассуждения могут быть приведены для точек каждой из групп);
Контроль осуществляется в два этапа. На первом определяются усредненные расфокусировки в трех точках кадрового окна Ьк(В), Ьк(А) и Ьк(С). Затем определяются значения расфокусировок в плоскости линзы Френеля 11 Ьф(В), Ьф(А) и Ьф(С) при втором положении наклонного зеркала 10 (по Ъиг,2), определяется разность расфокусировок для соответствующих точек
аВ Ьк{В)-Ьф(В);
аА Ьк(А) - (А).(8)
аС БТ(С)-Ьф|с);
и полученный результат сравнивается с допуском.
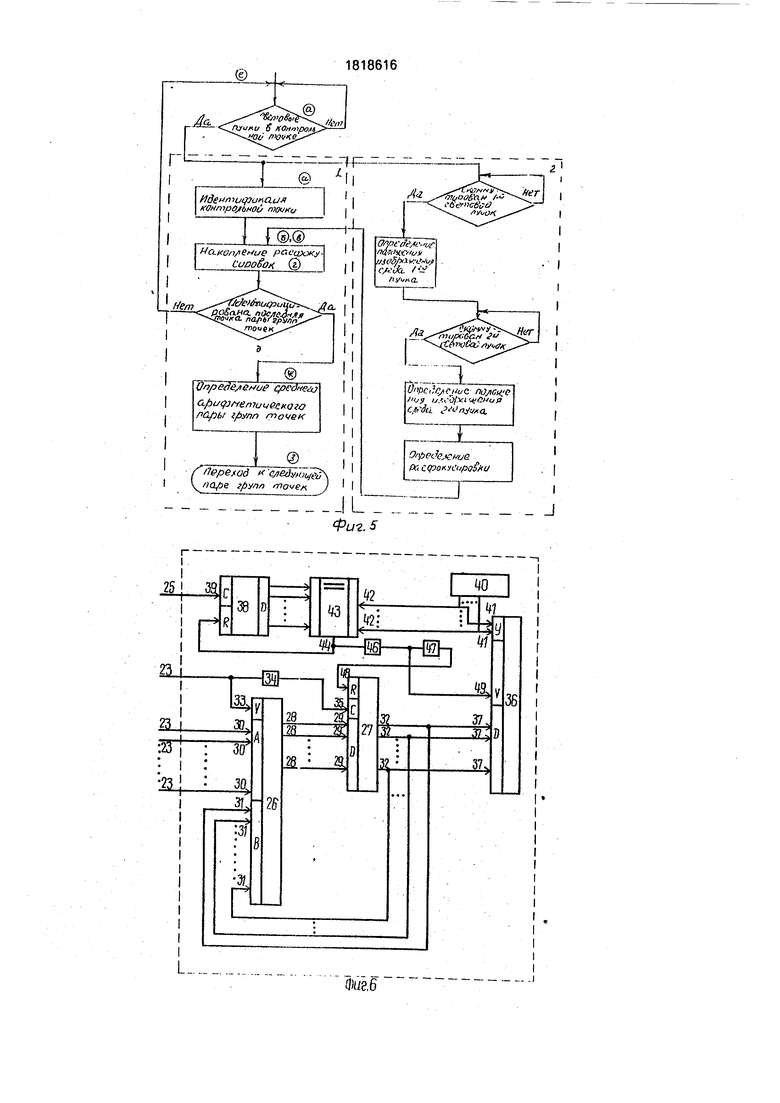
Укрупненный алгоритм функционирования устройства представлен в виде блок- схемы на фиг.5. Причем пунктиром обведены два основных блока операций: блок 1 и блок 2. При этом в состав блока 1 входят основные операции, выполняемые блоком усреднения расфокусировок 22 (по фиг. 1), а в состав блока 2 - операции выполняемые известным электронным блоком 17 (по фиг.1) обработки информации.
В соответствии с приведенным вариантом алгоритма - сьем информации, определение расфокусировок и их усреднение выполняются в реальном масштабе времени в процессе сканирования, т.е. после поступления с датчика положения активного сигнала, свидетельствующего о положении светового пучка в контрольной точке, электронный блок 17 определяет расфокусировку в этой точке, а параллельно этому блок 22 идентифицирует номер точки в группе и переходит в режим ожидания приема информации из блока 17. Ожидание прерывается запор-завершению определения блоком 17 значения расфокусировки и выдаче его в виде данных по группе выходов 24 совместно со стробирующими сигналами. Блоком 22 принимаются данные и накапливаются в его элементах памяти, после чего осуществляется проверка по результатам идентификации является ли принятое значение
0 расфокусировкой последней точки в паре групп. Если обработана контрольная точка с промежуточным номером, осуществляется переход блоком 22 к опросу активного состояния датчика положения 8, свидетель5 ствующего о нахождении светового пучка в следующей контрольной точке анализируемой группы. Блок же 17 переходит к указанному состоянию ожидания активизации датчика 8 сразу после выдачи данных о зна0 чении расфокусировки на группу выходов 24. После накопления данных о расфокусировке блоком 22 в последней контрольной точке пары групп им осуществляется усреднение значений расфокусировок (определе5 ние среднего арифметического) в соответствии с выражением (6), после чего осуществляется переход к анализу расфокусировок в следующей паре групп контрольных точек.
0 В устройстве введенные блоки и узел остановки в заданных положениях являются неоднозначными понятиями.
В соответствии с описанием, как в составе всего устройства (фиг.1), так и в укруп5 ненном алгоритме (фиг.5), блок 22 выполняет следующие функции:
- анализ активного состояния датчика положения 8 и в случае фиксации его идентификацию номера активизации датчика в 0 паре групп относительно начальной;
- ожидание появления сигнала, синхронизирующего выдачу данных блоков 17 по группе входов 24;
- прием данных по группе выходов 23; 5 - накопление данных в сумматоре и запоминание промежуточной суммы;
- сравнение идентифицированного номера точки с уставкой, соответствующей числу точек в паре групп; 0 - в случае, если номер активизации не равен уставке, осуществление перехода к шагу а);
- в случае, если результат сравнения положительный, деление результата сум- 5 мирования на значение уставки, соответствующее числу контрольных точек в анализируемой паре групп;
- установка в начальное состояние промежуточной суммы, кода признака соответ- ствующего текущему номеру активизации в
группе и регистрация усредненного значения расфокусировки.
Приведенные выше пункты алгоритма функционирования элементов блока усреднения расфокусировок, обозначенных на фиг.5 соответствующими буквами.
Указанные выше блоки широко известны, в частности, могут быть использованы для их реализации элементы микропроцессорной и дискретной (жесткая логика) техники.
Аппаратно-программные средства должны содержать:
- узел-сравнения;
- узел усреднения и регистрации результата;
- узел задания числа контрольных точек в виде уставки;
- вспомогательные элементы задержки.
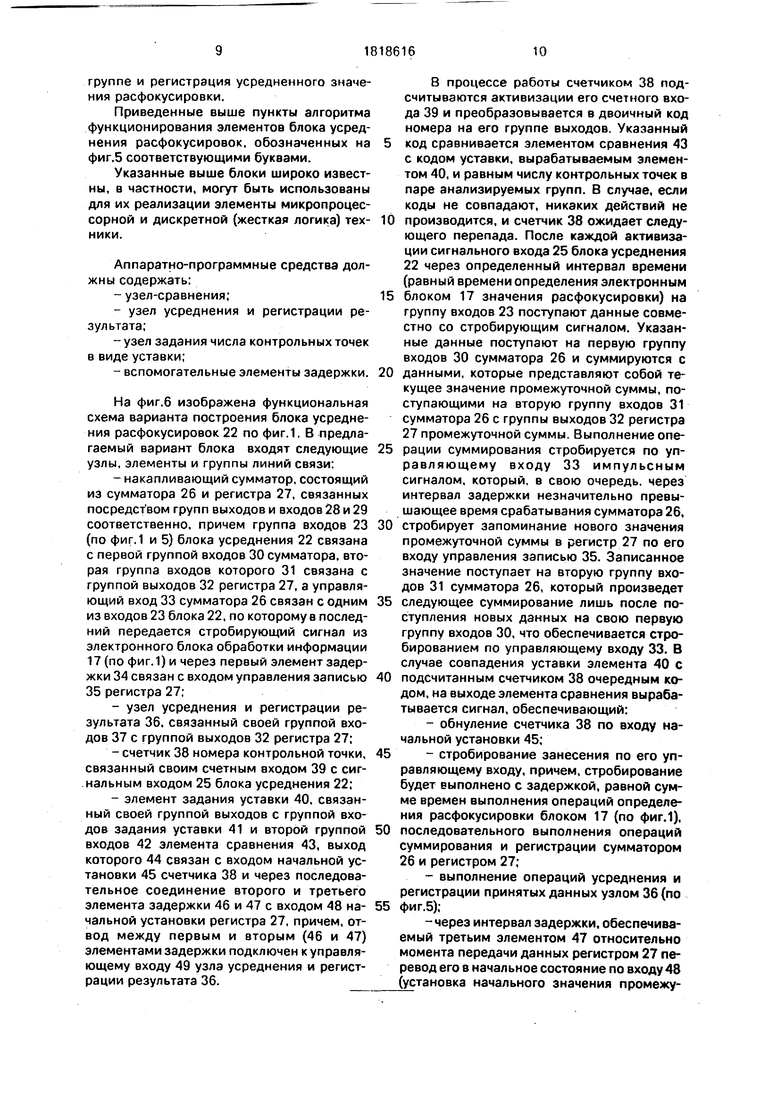
На фиг.6 изображена функциональная схема варианта построения блока усреднения расфокусировок 22 по фиг.1. В предлагаемый вариант блока входят следующие узлы, элементы и группы линий связи:
- накапливающий сумматор, состоящий из сумматора 26 и регистра 27, связанных посредством групп выходов и входов 28 и 29 соответственно, причем группа входов 23 (по фиг.1 и 5) блока усреднения 22 связана с первой группой входов 30 сумматора, вторая группа входов которого 31 связана с группой выходов 32 регистра 27, а управляющий вход 33 сумматора 26 связан с одним из входов 23 блока 22, по которому в последний передается стробирующмй сигнал из электронного блока обработки информации 17 (по фиг.1) и через первый элемент задержки 34 связан с входом управления записью 35 регистра 27;
- узел усреднения и регистрации результата 36. связанный своей группой входов 37 с группой выходов 32 регистра 27;
- счетчик 38 номера контрольной точки, связанный своим счетным входом 39 с сигнальным входом 25 блока усреднения 22;
- элемент задания уставки 40, связанный своей группой выходов с группой входов задания уставки 41 и второй группой входов 42 элемента сравнения 43, выход которого 44 связан с входом начальной установки 45 счетчика 38 и через последовательное соединение второго и третьего элемента задержки 46 и 47 с входом 48 начальной установки регистра 27, причем, отвод между первым и вторым (46 и 47) элементами задержки подключен к управляющему входу 49 узла усреднения и регистрации результата 36.
В процессе работы счетчиком 38 подсчитываются активизации его счетного входа 39 и преобразовывается в двоичный код номера на его группе выходов. Указанный код сравнивается элементом сравнения 43 с кодом уставки, вырабатываемым элементом 40, и равным числу контрольных точек в паре анализируемых групп. В случае, если коды не совпадают, никаких действий не
0 производится, и счетчик 38 ожидает следующего перепада. После каждой активизации сигнального входа 25 блока усреднения 22 через определенный интервал времени (равный времени определения электронным
5 блоком 17 значения расфокусировки) на группу входов 23 поступают данные совместно со стробирующим сигналом. Указанные данные поступают на первую группу входов 30 сумматора 26 и суммируются с
0 данными, которые представляют собой текущее значение промежуточной суммы, поступающими на вторую группу входов 31 сумматора 26 с группы выходов 32 регистра 27 промежуточной суммы. Выполнение опе5 рации суммирования стробируется по управляющему входу 33 импульсным сигналом, который, в свою очередь, через интервал задержки незначительно превышающее время срабатывания сумматора 26,
0 стробирует запоминание нового значения промежуточной суммы в регистр 27 по его входу управления записью 35. Записанное значение поступает на вторую группу входов 31 сумматора 26, который произведет
5 следующее суммирование лишь после поступления новых данных на свою первую группу входов 30, что обеспечивается стро- бированием по управляющему входу 33. В случае совпадения уставки элемента 40 с
0 подсчитанным счетчиком 38 очередным кодом, на выходе элемента сравнения вырабатывается сигнал, обеспечивающий:
- обнуление счетчика 38 по входу начальной установки 45;
5 - стробирование занесения по его управляющему входу, причем,стробирование будет выполнено с задержкой, равной сумме времен выполнения операций определения расфокусировки блоком 17 (по фиг.1),
0 последовательного выполнения операций суммирования и регистрации сумматором 26 и регистром 27;
- выполнение операций усреднения и регистрации принятых данных узлом 36 (по 5 фиг.5);
-через интервал задержки, обеспечиваемый третьим элементом 47 относительно момента передачи данных регистром 27 перевод его в начальное состояние по входу 48 (установка начального значения промежуточной суммы перед анализом следующей пары групп точек). Задание числа усредняемых данных (делитель выражения (6)) выполняется элементом задания уставки 40 по одноименной группе входов 41 узла усреднения и регистрации результата.
В настоящее время методы разработки микропроцессорной системы по функциональной схеме (фиг.6). блок-схема алгоритма (фиг.5) и приведенному выше словесному описанию алгоритма широко известны. При этом из множества возможных вариантов технической реализации блока можно выделить два основных направления:
- реализация блока в виде проблемно- ориентированного контроллера, имеющего минимальное для выполнения требуемых функций число элементов и записанное в постоянное запоминающее устройство программное обеспечение на языке АССЕМБЛЕР;
- реализация блока на основе серийно выпускаемых отечественной промышленностью микропроцессорных средств.
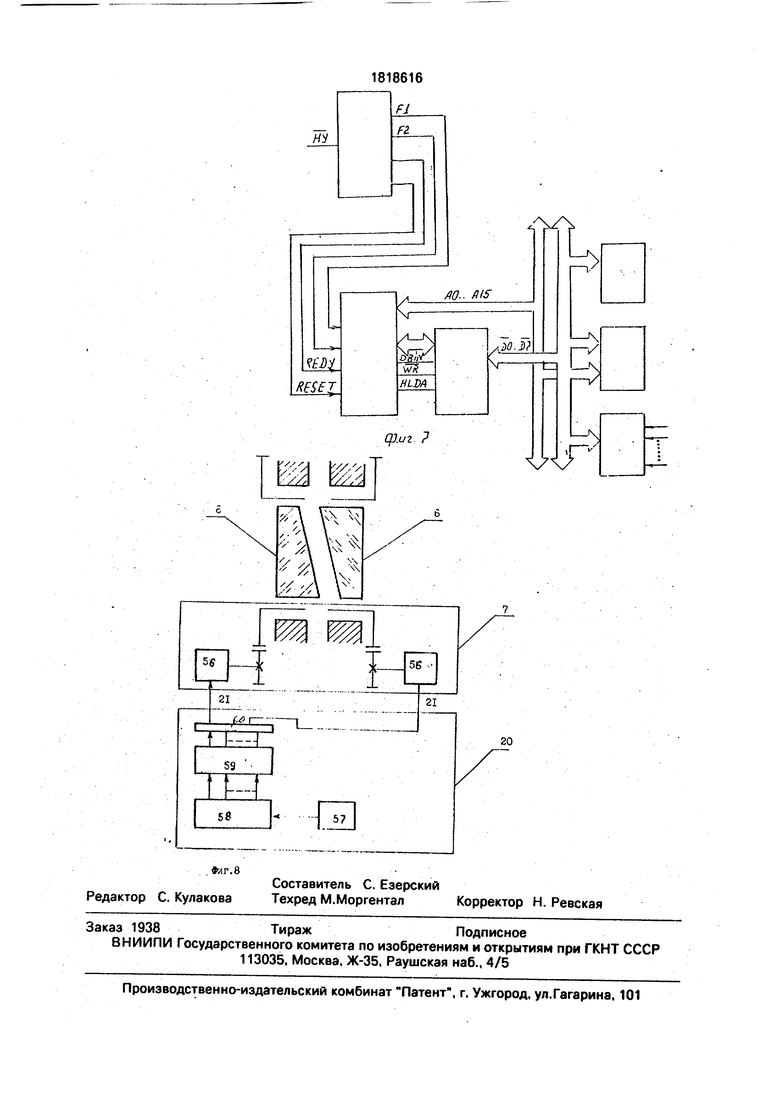
На фиг.7 изображена блок-схема варианта технической реализации блока 22 (по фиг. 1, 5) усреднения расфокусировок.
На фиг.7 изображены:
50 - системный генератор фаз на основе ИС КР580ГФ24;
51 - центральный процессор на основе БИСКР580ИК80:
52 - системный контроллер и шинный формирователь на основе БИС КР580ВК38;
53 - постоянное запоминающее устройство (ПЗУ);
54 - оперативное запоминающее устройство (ОЗУ);
55 - программируемый параллельный адаптер связи с внешними устройствами на основе БИС КР580ИК55;
- сигнальный вход 25 блока 22 (по фиг.1);
- группа входов 23 блока 22 (по фиг.1);
В качестве примера реализации блока 22 на основе второго подхода может быть его выполнение на основе универсального программируемого контроллера Электроника МС2702 с пультом управления и программным обеспечением, причем контроллер содержит все необходимые для реализации функций блока усреднения расфокусировок узлы, а именно: ОЗУ, ПЗУ; центральный процессор на БИС КР580ИК80; программируемый адаптер КР580ИК55.
По приведенным выше материалам возможна реализация блока на основе жесткой логики, при этом счетчик 38 может быть реализован на ИС К555ИЕ5; сумматор - на основе ИС двоичных сумматоров К155ИМ1, регистр 27 - на ИС К555ИР22. К555ИР23; элемент 40 - на ИС К555СП1; элемент 40 5 в виде набора задатчиков - переключателей типа ПП-10 или в виде запрограммированного запоминающего устройства; элементы задержки - на основе комбинаций ИС одно- вибраторов К555АГЗ; узел 36 - (простейший
0 делитель представляет собой сдвиговый регистр). Механизм сканирования 6 (по фиг.1), узел остановки в заданных положениях 7 и блок управления механизмом сканирования 20 могут быть реализованы на основе раз5 личных принципов, применяемых в оптико- механическом приборостроении, с применением прецезионных шаговых ска- наторов, имеющих сканирующие элементы, прецезионный привод на основе пьезоэлек0 трического двигателя и блока управления.
В простейшем случае механизм сканирования выполняется в виде оптического клина, управляемого шаговым приводом, вы полня ющим фун кции узла остановки в за5 данных положениях 7 (по фиг.1), и блока управления 20, управляющего приводом посредством электрических сигналов по заданной программе. В этом случае движение световых лазерных лучков будет осуществ0 ляться по окружности с остановкой в симметричных относительно направлений на органы юстировки группах контрольных точек.
Для получения более сложной траекто5 рии сканирования, например, треугольной, в качестве механизма сканирования может быть использован клиновый компенсатор, состоящий из двух клиньев одинаковой оптической силы, расположенных на оптиче0 ской оси функциональная схема варианта технической реализации элементов сканирования: механизма сканирования 6, узла остановки 7, и блока управления 20 механизма сканирования приведена на фиг.8.
5 Механизм сканирования в виде клинового компенсатора управляется от узла остановки 7, выполненного в виде двух раздельных приводов на основе шаговых двигателей 56. Каждый из приводов 56 управляет соответ0 ствующим клином и обеспечивает установку их в определенное положение, обеспечивающее сканирование световых пучков по заданной программе. При этом управляющие работой каждого из приводов сигналы выра5 батываются блоком управления 20, состоящим из генератора сканирования 57, счетчика сканирования 58, запоминающего устройства 59 с программой сканирования и формирователей-усилителей 60. В процее се работы генератором 57 генерируется пбследовательность импульсов, поступающая на вход счетчика 58, который осуществляется циклический перебор двоичного кода на своих выходах, которые управляют адресными входами запоминающего устройства 59, в котором записана программа сканирования, представляющая собой двоичный код, соответствующий однозначному положению каждого из приводов 56 и узла остановки 7 каждый момент времени. Указанный код в виде данных поступает на входы формирователей-усилителей 60, вырабатывающих сигналы, имеющие необходимую форму и амплитуду, для перемещения исполнительных механизмов приводов 56 и, как следствие, клиньев механизма сканирования 7.
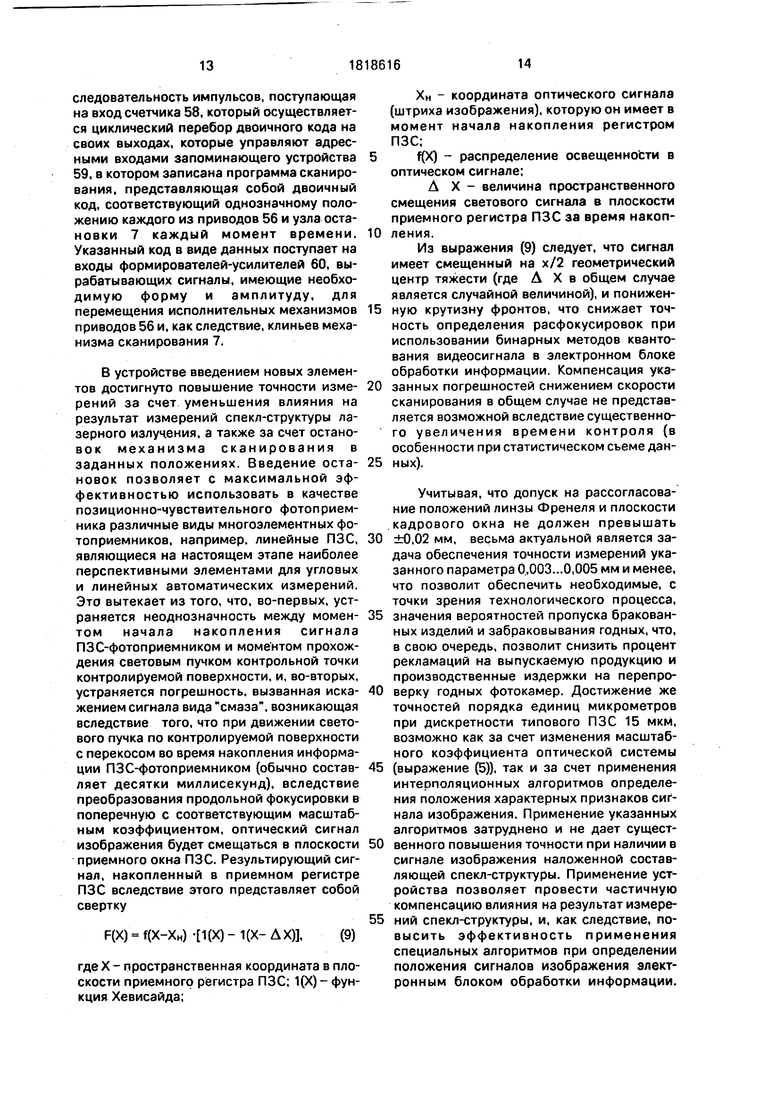
В устройстве введением новых элементов достигнуто повышение точности измерений за счет уменьшения влияния на результат измерений спекл-структуры лазерного излучения, а также за счет остано- вок механизма сканирования в заданных положениях. Введение остановок позволяет с максимальной эффективностью использовать в качестве позиционно-чувствительного фотоприемника различные виды многоэлементных фотоприемников, например, линейные ПЗС, являющиеся на настоящем этапе наиболее перспективными элементами для угловых и линейных автоматических измерений. Это вытекает из того, что, во-первых, устраняется неоднозначность между моментом начала накопления сигнала ПЗС-фотоприемником и моментом прохождения световым пучком контрольной точки контролируемой поверхности, и, во-вторых, устраняется погрешность, вызванная искажением сигнала вида смаза, возникающая вследствие того, что при движении светового пучка по контролируемой поверхности с перекосом во время накопления информации ПЗС-фотоприемником (обычно составляет десятки миллисекунд), вследствие преобразования продольной фокусировки в поперечную с соответствующим масштабным коэффициентом, оптический сигнал изображения будет смещаться в плоскости приемного окна ПЗС. Результирующий сигнал, накопленный в приемном регистре ПЗС вследствие этого представляет собой свертку
F(X) f(X-XH) (Х) - 1(Х- ДХ),
(9)
где X - пространственная координата в плоскости приемного регистра ПЗС; 1(Х)- функция Хевисайда;
Хн - координата оптического сигнала (штриха изображения), которую он имеет в момент начала накопления регистром ПЗС;
f(X) - распределение освещенности в оптическом сигнале;
А X - величина пространственного смещения светового сигнала в плоскости приемного регистра ПЗС за время накопления.
Из выражения (9) следует, что сигнал имеет смещенный на х/2 геометрический центр тяжести (где Д X в общем случае является случайной величиной), и пониженную крутизну фронтов, что снижает точность определения расфокусировок при использовании бинарных методов квантования видеосигнала в электронном блоке обработки информации. Компенсация указанных погрешностей снижением скорости сканирования в общем случае не представляется возможной вследствие существенного увеличения времени контроля (в особенности при статистическом сьеме данных).
Учитывая, что допуск на рассогласование положений линзы Френеля и плоскости .кадрового окна не должен превышать
±0,02 мм, весьма актуальной является задача обеспечения точности измерений указанного параметра 0..003...0,005 мм и менее, что позволит обеспечить необходимые, с точки зрения технологического процесса,
значения вероятностей пропуска бракованных изделий и забраковывания годных, что, в свою очередь, позволит снизить процент рекламаций на выпускаемую продукцию и производственные издержки на перепроверку годных фотокамер. Достижение же точностей порядка единиц микрометров при дискретности типового ПЗС 15 мкм, возможно как за счет изменения масштабного коэффициента оптической системы
(выражение (5)), так и за счет применения интерполяционных алгоритмов определения положения характерных признаков сигнала изображения. Применение указанных алгоритмов затруднено и не дает существенного повышения точности при наличии в сигнале изображения наложенной составляющей спекл-структуры. Применение устройства позволяет провести частичную компенсацию влияния на результат измерений спекл-структуры, и, как следствие, повысить эффективность применения специальных алгоритмов при определении положения сигналов изображения электронным блоком обработки информации.
Эффект достигается также и при использовании метода бинарного квантования.
Формула изобретения Устройство для контроля зеркальной фотокамеры, содержащее расположенный в плоскости фотопленки отражатель с матовой поверхностью, сопряженные друг с другом с помощью светоделительного элемента, установленного перед фотоаппаратом, приемную оптическую систему и формирующую оптическую систему, выполненную в виде расположенных по обе стороны от светоделительного элемента механизма сканирования, установленного перед фотокамерой, и механизма обтюрации, перед которым размещен оптический блок раздвоения светового пучка, установленный перед источником света в виде лазера, а приемная система выполнена в виде объектива, в фокальной плоскости которого расположен позиционно-чувствительный
фотоприемник, выходом соединенный с первым входом элктронного блока обработки информации, второй и третий входы которого соединены соответственно с
датчиками положения механизма обтюрации и механизма сканирования, отличаю щ е е с я тем, что, с целью повышения точности контроля, в него введены электрически соединенные блок управления и кинематически связанный с механизмом сканирования узел остановки в заданных положениях, соответствующих нахождению сканирующих контролируемую поверхность световых пучков в контрольных точках, расположенных на траектории сканирования в виде групп, симмеричных относительно заданных точек, причем выходы электронного блока обработки информации соединены с соответствующими входами введенного
блока усреднения расфокусировок, сигнальным входом, соединенного с датчиком положения механизма сканирования.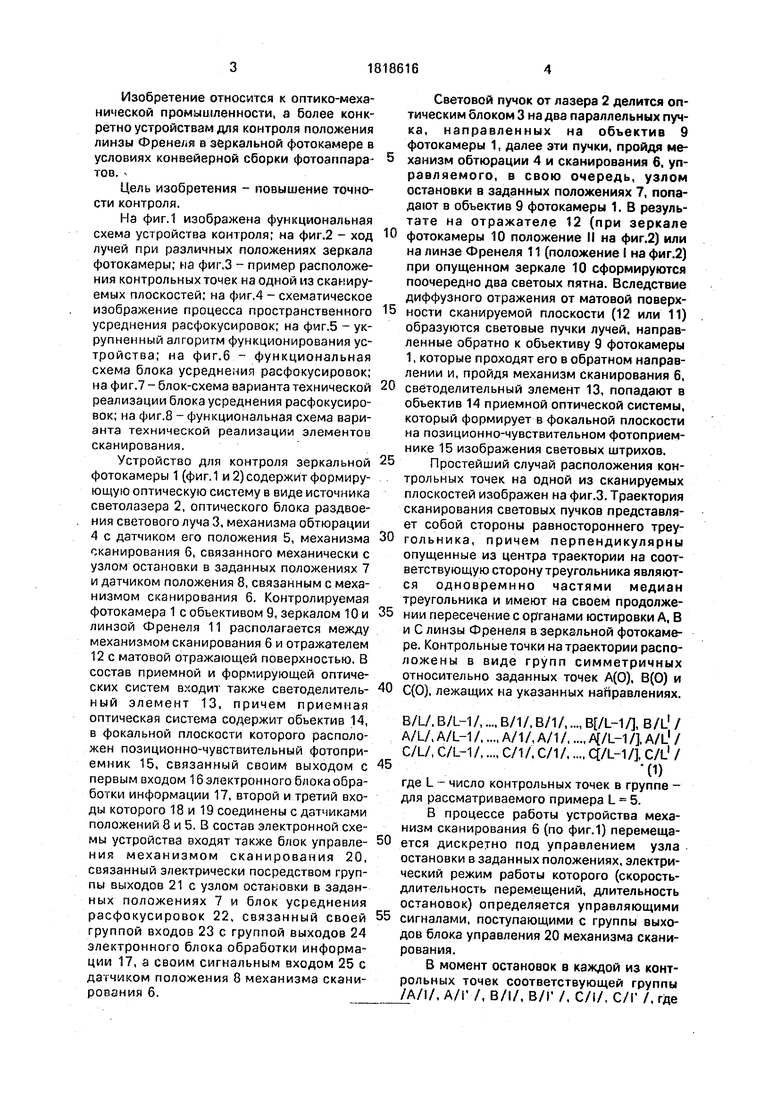
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля зеркальной фотокамеры | 1989 |
|
SU1666998A1 |
| Устройство для контроля положения линзы Френеля в зеркальном фотоаппарате | 1984 |
|
SU1219999A1 |
| Устройство для измерения линейных размеров | 1989 |
|
SU1744444A1 |
| Устройство для контроля шероховатости поверхности | 1990 |
|
SU1711001A1 |
| Устройство для бесконтактного определения высоты шероховатости поверхности | 1987 |
|
SU1397728A1 |
| Устройство для определения положения фокальной плоскости объектива | 1985 |
|
SU1281950A1 |
| Устройство для контроля положения линзы Френеля в зеркальном фотоаппарате | 1989 |
|
SU1631505A2 |
| Способ измерения толщины тонкой пленки и картирования топографии ее поверхности с помощью интерферометра белого света | 2016 |
|
RU2641639C2 |
| СПОСОБ РЕГИСТРАЦИИ ДИФФУЗНО ОТРАЖЕННОГО ИЛИ ДИФФУЗНО РАССЕЯННОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2458361C1 |
| СПОСОБ ИССЛЕДОВАНИЯ МИКРООБЪЕКТОВ | 1998 |
|
RU2154815C2 |
Использование: оптико-механическая промышленность. Сущность изобретения: устройство состоит из отражателя 12с матовой поверхностью в плоскости фотопленки фотокамеры 1, электронного блока обработки информации 17, датчиков положения 5 и 8 и сопряженных одна с другой посредством светоделительного элемента приемной и формирующей оптических систем с излучателем 2 в виде лазера. Световой пучок последнего делится блоком 3 раздвоения светового пучка на два пучка, которые через механизмы обтюрации 4 и сканирования 6 и объектив 9 фотокамеры 1 освещает контролируемую поверхность и, отразившись, проходят оптическую систему в обратном направлении и преобразуются в фокальной плоскости объектива приемной системы в электрический сигнал позиционно-чувстви- тельным фотоприемником 15. Положительный эффект компенсации влияния спекл-структуры лазерного излучения (как результата отражения от матовых поверхностей контролируемых плоскостей и искажений, вызванных движением световых пучков) достигается за счет введения узла остановки 17 механизма 7 сканирования в заданных положениях, управляемого блоком управления 17, и блока усреднения расфокусировок 22, выполняющего операцию пространственного усреднения расфокусировок в парах групп контрольных точек, расположенных на траектории сканирования симметрично относительно заданных точек, лежащих на направлениях на органы юстировки линзы Френеля. 8 ил. Ј со 00 Os (Ј 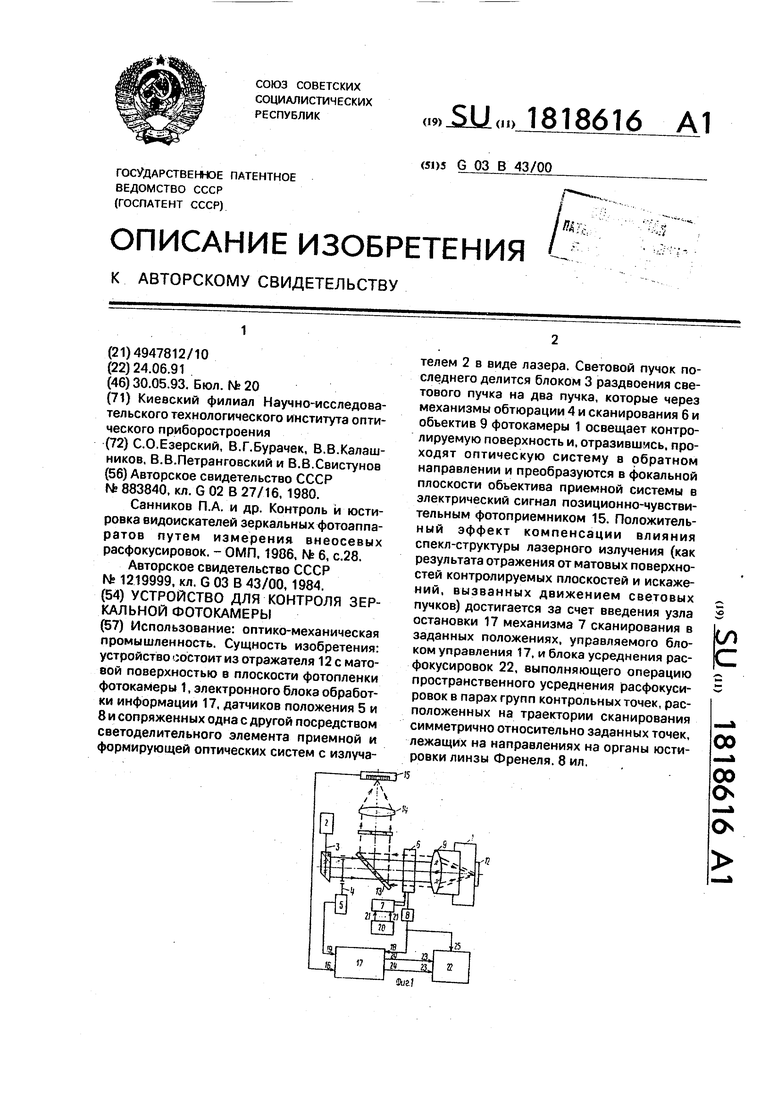
ВЫВМВр/ %) atl BV)
k
в
Фиг. 3
1
п
I I
io N
.
Ito
I СП
I
Л Ъ)
It
Ч
|i
Q ц
If
| Оптико-электронное устройство для совмещения фокальной плоскости объектива с заданной плоскостью | 1980 |
|
SU883840A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Санников П.А | |||
| и др | |||
| Контроль и юстировка видоискателей зеркальных фотоаппаратов путем измерения внеосевых расфокусировок | |||
| - ОМП, 1986, № 6, с.28 | |||
| Устройство для контроля положения линзы Френеля в зеркальном фотоаппарате | 1984 |
|
SU1219999A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
