Изобретение относится к сельскому хозяйству, в частности к привязи для животных.
Целью изобретения является повышение надежности работы привязи для животных.
Поставленная цель достигается тем, что в известной привязи для коров, содержащей ошейник с гибкой тягой, на свободном конце которой имеется груз, и установленные на опоре для каждой тяги пары направляющих элементов с запорным шпингалетом, связанным с подвижной в продольном направлении горизонтальной штангой, снабженной вилкой, взаимодействующей со стержнем, выполненным в виде пальца шпингалета, направляющие элементы для гибкой тяги с грузом отогнуты от кормушки под углом не менее угла трения материала гибкой тяги по материалу направляющих элементов, а межцентровое расстояние между опорным штырем и штырем улавливателя со стороны упора с фиксатором определяется по зависимости
А B + b-(-2d + y + a,(1) где В - ширина пластины упора;
b - расстояние между штырями улавливателя;
d - диаметр штырей улавливателя;
у-свободный конец шпингалета;
а - свободный ход шпингалета в штыре улавливателя со стороны упора.
При этом свободный ход шпингалета в штыре улавливателя со стороны упора, обеспечивающий надежную работу устройства для привязи животных, находится в пределах
.
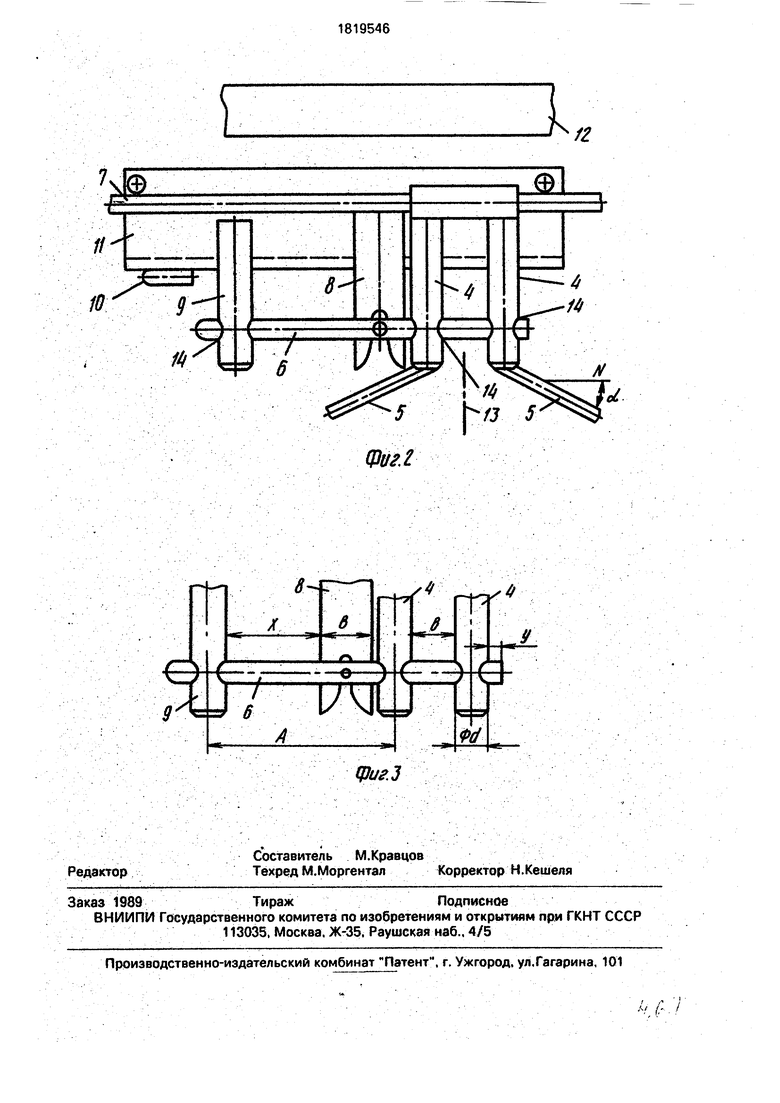
На фиг.1 показана привязь для животных, вид сбоку; на фиг,2 -то же, вид сверху; на фиг.З - расчетная схема к определению межцентрового расстояния между опорным штырем и штырем улавливателя со стороны упора с.фиксатором.
Привязь для животных содержит ошейник 1 с гибкой тягой 2, на свободном конце которого закреплен груз 3. Привязь снабжена запорным приспособлением, которое состоит из штырей 4 с направляющими элементами5, шпингалета б и.управляющей тяги 7 с упором 8, опорного штыря 9 и скобы 10. Штыри 4 жестко закреплены на раме 11.
На каждом из штырей 4 соответственно расположено по одному направляющему Элементу 5, которые отогнуты от кормушки 12 на угол Q, величина которого не менее угла трения материала гибкой тяги 2 по материалу направляющих элементов 5, то есть:
(2) где - указанный угол трения.
Угол а (угол отгиба направляющих элементов 5 от кормушки 12) измеряется от вертикальной плоскости N, перпендикулярной оси 13 стойла животного (см. фиг.2).
Опорный штырь 9 жестко закреплен на раме 11 привязи. Штыри 4 улавливателя и опорный штырь 9 имеют отверстия 14: Шпингалет 6 имеет рукоятку 15 и палец 16 и расположен с возможностью перемещения в отверстиях 14 опорного штыря 9 и штырей улавливателя 4.
Рукоятка 15 и палец 16 шпингалета 6 5 расположены по обе стороны опорного штыря 9. Вдоль кормушки 12 горизонтально размещена управляющая тяга 7 с упором 8, выполненным в виде вилки. Упор 8 размещен между опорным штырем 9 и штырем 0 улавливателя. Скоба 10 жестко закреплена на конце рамы 11 рядом с опорным штырем 9 и расположена с возможностью зацепления с рукояткой 15 шпингалета 6.
Привязь для животных работает следу- 5 ющим образом.
Управляющая тяга 7 через упор 8. находящийся в зацеплении с пальцем 16 шпингалета 6, выводит из отверстия 14 штыря 4 свободный конец шпингалета, освобождая 0 промежуток между обоими штырями А улавливателя. Межцентровое расстояние (А) между опорным штырем 9 и штырем 4 со стороны упора 8с фиксатором выбрано таким образом, что при перемещении шпинга- 5 лета б посредством упора 8 под действием тяги 7 (на фиг.2 тяга 7 перемещается влево), свободный конец шпингалета 6 длиной (у) перемещается влево на величину своего хода равного: 0 (b + d + y).(3)
Величина хода, шпингалета определяв : мая зависимостью (3), должна быть обеспечена взаимным расположением конструктивных элементов (штырь 9, упор 8 5 и штырь 4 со стороны упора 8) в виде: хЧА-d-B(4) Выражения (3) и (4) определяют ход шпингалета, обеспечивающий удовлетворительную работу фиксатора, поэтому указан- 0 ные выражения (3) и (4) являются уравнениями системы (5): x A-d-B
x b + d + y(5) Решив систему (5) относительно (А), пол5
учим
A B + b + 2d + y.(6) Выражение (6) определяет межцентровое расстояние, обеспечивающее надежную работу, но оно является номинальным
его значением. В этом смысле имеется поле допуска, обеспечивающее прежние условия, но которые при монтаже обеспечат воз- можность подбирать размерные цепи элементов фиксатора. После допуска определяется свободном ходом (А) конца шпингалета 6 в штыре 4 улавливателя со стороны упора, то есть возможно увеличение параметра (А) по зависимости (6) на величину (а) в виде:
A B + b + 2d + y + a.(7)
При этом свободный ход шпингалета в штыре улавливателя со стороны упора, обеспечивающий надежную работу устройства для привязи животных, находится в пределах:
О а d.(8)
Если расстояние (А) будет меньше оптимального, определяемого выражением (7), то свободный конец шпингалета не полностью освободит расстояние (Ь) между штырями 4, что будет затруднять отвязь или привязь животного и снижать надежность работы устройства.
Если расстояние (А) между указанными штырями 9 и А со стороны упора 8 будет больше оптимального, выражение (7), то свободный конец шпингалета выскочит из отверстия 14 штыря 4 со стороны упора 8, Чтобы этого не произошло, расстояние (А) между штырями 9 и 4 со стороны упора 8 следует выбирать по зависимости (7). Сво бодное перемещение шпингалета б тяги 7 будет ограничено шириной пластины (В) упора 8 и равно (х) (см. фиг.З).
При подходе к кормушке 12 животное тянется к корму, находящемуся в кормушке, при этом гибкая тяга 2 скользит по направляющим элементам 5 улавливателя. Так как направляющие элементы 5 отогнуты от кормушки (фиг.2) на угол не менее, угла трения материала гибкой тяги 2 по материалу направляющих элементов 5, то гибкая тяга 2 с грузом 3 направляется в пространство (Ь) между штырями улавливателя 4 независимо от того, в каком месте гибкая тяга 2 прика - сается к направляющим элементам 5. Благодаря тому, что направляющие элемента 5 отогнуты от кормушки на величину угла, определяющегося зависимостью (2), гибкая тяга 2 имеет возможность свободно перемещаться в направлении штырей 4 для фиксации.
После того, как гибкая тяга 2с грузом 3 попала между штырями 4, управляющая тяга 7 посредством упора 8, находящегося в зацеплении с пальцем 16, вводит шпингалет 6 в отверстие 14 штыря 4. Таким образом, животное будет привязано.
Для отвязывания животного управляющей тягой 7 посредством упора 8. находящегося в зацеплении с пальцем 16, свободный конец шпингалета выводится из 5 отверстия 14, освобождая расстояние (Ь) между штырями 4.
Отдельное животное можно оставить на привязи следующим образом. Поворотом шпингалета 6 палец 16 выводят из за цеп л е0 ния с упором 8, а рукоятку 15 вводят в скобу 10. Для индивидуального отвязывания животного поворотом шпингалета 6 палец 16 выводится из зацепления с упором 8. Шпингалет б вручную за рукоятку 15 выводят из
.5 отверстия 14, освобождая промежуток (Ь) между штырями 4.
Эффективность применения указанной привязи для животных заключается в том, что улучшаются условия работы животново0 дов.
Возможно быстрое и надежное отвязы- вание животных во внештатной ситуации (при возникновении пожара в помещении животноводческой фермы), что будет спо5 собствовать их сохранению.
Формула изобретения Привязь для коров, содержащая ошейник с гибкой тягой, на которой подвешен груз, и установленное на раме перед кор0 мушкой запорное приспособление, выпол- ненное в виде пары наклонных направляющих для гибкой тяги и горизонтальной штанги, на которой закреплена вилка, расположенная под прикрепленными к
5 раме опорным и двумя несущими штырями, имеющими в своих свободных концах горизонтальные отверстия, в которых установлен с возможностью продольного перемещения стержень с пальцем и води0 лом, выполненный в виде шпингалета, при этом водило установлено между опорным и одним из несущих штырей с возможностью взаимодействиям вилкой, отличающаяся тем, что, с целью повышения надежности ее в работе, угол наклона направляющих
5 для гибкой тяги с грузом составляет не менее угла трения материала гибкой тяги по материалу направляющих для гибкой тяги, а несущие штыри шпингалета расположены друг от друга на расстоянии A B + b + 2d +
0 +у + а, где В - ширина вилки; в - расстояние между ближними концами направляющих, d - диаметр направляющих, у - длина концевой части стержня шпингалета, выступающей из крайнего несущего штыря в
5 положении стержня Закрыто, а - длина свободного хода стержня шпингалета, причем 0 а d.

| название | год | авторы | номер документа |
|---|---|---|---|
| Привязь для животных | 1983 |
|
SU1161036A1 |
| Привязь для коров "Валковчанка | 1985 |
|
SU1373377A1 |
| Групповая привязь для животных | 1988 |
|
SU1558352A1 |
| Привязь для животных | 1983 |
|
SU1165322A1 |
| Привязь для животных | 1978 |
|
SU701610A1 |
| Привязь для животных | 1980 |
|
SU1014544A1 |
| Привязь для животных | 1984 |
|
SU1311678A1 |
| Привязь для животного | 1987 |
|
SU1655402A1 |
| Привязь для животных | 1987 |
|
SU1472008A1 |
| Привязь для животных | 1987 |
|
SU1493197A2 |