Предлагаемое изобретение относится к широко известной отрасли авиационной техники, а именно к электрогидравлическим следящим рулевым приводам объемно-дроссельного регулирования, и может быть преимущественно использовано в системах управления беспилотных крылатых летательных аппаратов.
Известны электрогидравлические следящие рулевые приводы с объемно-дроссельным регулированием, содержащие гидродвигатель, золотниковый распределитель, источник питания с автоматизированным насосом переменной подачи и обратной связью по давлению и баком для слива рабочей жидкости (см., например, книгу Н.С.Гамынина "Проектирование следящих гидравлических приводов летательных аппаратов", Машиностроение, 1981 г., стр.12, рис.1.5, а также авт. свид. №1840184, 2006).
Наиболее близким по технической сущности является электрогидравлический привод с объемно-дроссельным регулированием (см. книгу Н.С.Гамынина "Гидравлический привод систем управления", Машиностроение, 1972 г., стр.25÷26, рис.1.3), содержащий золотниковый гидрораспределитель, гидродвигатель, бак и электроприводную насосную станцию с насосом переменной производительности (см. там же, стр.196, рис.5.14), в корпусе которого размещены плунжеры, дроссель регулятора, регулятор производительности, выполненный в виде подпружиненного дифференциального штока, жестко связанного при помощи диска с регулировочными втулками, подвижно насаженными на плунжерах, и камера, образованная торцом диска и углублением в корпусе.
Хорошо известны достоинства рулевых гидроприводов данного класса, основными из которых являются высокий кпд, минимальный удельный вес, высокое быстродействие, простота в эксплуатации, невысокая стоимость и др.
Однако известные рулевые гидроприводы обладают рядом недостатков.
Одним из существенных недостатков известных рулевых гидроприводов, который особенно проявляет себя на беспилотных крылатых летательных аппаратах, в условиях интенсивных внешних вибраций, связанных с работой двигательных установок, атмосферных возмущений и т.д., является невысокие динамические характеристики из-за слабого демпфирования регулятора насоса, которое, как известно, определяется соотношением площади демпфирования, в данном случае дифференциальной площади штока, и проходного сечения дросселя регулятора, установленного в канале обратной связи по давлению.
Кроме того, размещение дросселя регулятора непосредственно на выходе насоса до основного фильтра является причиной его засорения продуктами износа, находящимися в неочищенной рабочей жидкости, что приводит к отказу регулятора производительности насоса и всего гидропривода в целом.
Целью предлагаемого изобретения является устранение указанного недостатка, а именно улучшение динамических характеристик рулевого гидропривода в условиях интенсивных внешних вибраций, а также увеличение надежности его работы при повышенной загрязненности рабочей жидкости.
Поставленная цель достигается тем, что камера, образованная углублением в корпусе насоса и торцом диска, связывающего его регулировочные втулки, соединена гидролинией с баком через дроссель, выполненный в виде щели, образованной с одной стороны контуром регулировочных втулок и связывающего их диска, а с другой стороны - контуром расточек, выполненных в корпусе насоса, вокруг регулировочных втулок.
Предлагаемое усовершенствование позволило значительно увеличить площадь демпфирования и, кроме того, практически устранить вероятность засорения дросселя регулятора насоса.
Сущность предлагаемого изобретения поясняется чертежом, где представлена его общая схема.
Автономный рулевой гидропривод содержит гидродвигатель 1, золотниковый распределитель 2, электромеханический преобразователь 3, бак 4, насос, в корпусе 5 которого размещены плунжеры 6, регулятор производительности, выполненный в виде дифференциального штока 7, связанного при помощи диска 8 с регулировочными втулками 9 и поджатого пружиной 10, кинетор 11, получающий вращение от электродвигателя 12, и обратные клапаны 13. Плунжеры 6 снабжены окнами 14, через которые осуществляется всасывание и разгрузка насоса. Между торцом диска 8 и углублением в корпусе 5 насоса расположена камера 15, сообщенная с баком 4 через дроссель 16 гидролинией 17.
Команда, поступающая в электромеханический преобразователь 3 в виде электрического сигнала управления, преобразуется в перемещение золотника распределителя 2, в результате чего одна из полостей гидродвигателя 1 соединяется с подачей насоса, а другая его полость - с баком 4. В зависимости от величины и знака управляющего сигнала обеспечивается поворот выходного звена гидродвигателя на определенный угол с различной скоростью. При этом втулки 9 занимают положение по отношению окон 14, соответствующее различным значениям управляющего сигнала. При отсутствии управляющего сигнала втулки 9 смещаются в сторону поджатия пружины 10 до такого положения, при котором окна 14 сообщены с баком на всей величине хода плунжеров 6.
Эксплуатация автономных рулевых гидроприводов на летательных аппаратах подтвердила высокие надежность и динамические характеристики на всех режимах полета, при этом амплитудно-фазочастотные характеристики гидроприводов улучшились в 2÷2,5 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ РУЛЕВОЙ ГИДРОПРИВОД | 1982 |
|
SU1128493A1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2003 |
|
RU2262625C2 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2003 |
|
RU2245462C1 |
| АВТОНОМНЫЙ РУЛЕВОЙ ГИДРОПРИВОД | 1986 |
|
SU1839994A1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2000 |
|
RU2184281C2 |
| НАСОСНЫЙ ГИДРОПРИВОД | 1998 |
|
RU2148191C1 |
| НАСОСНЫЙ ГИДРОПРИВОД | 2000 |
|
RU2182676C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
Изобретение относится к области авиационной техники. Гидропривод содержит электродвигатель, золотниковый распределитель, электромеханический преобразователь, гидродвигатель, бак и насос с клапанно-щелевым распределением. В корпусе насоса размещены плунжеры и регулятор производительности с дросселем, выполненный в виде дифференциального штока, жестко связанного при помощи диска с регулируемыми втулками. В корпусе насоса выполнено углубление, которое с торцом диска образует камеру, которая через дроссель соединена с баком. Дроссель выполнен в виде щели, образованной контуром регулировочных втулок и контуром расточек, выполненных в корпусе насоса вокруг регулировочных втулок. Технический результат - улучшение динамических характеристик в условиях внешних вибраций. 1 ил.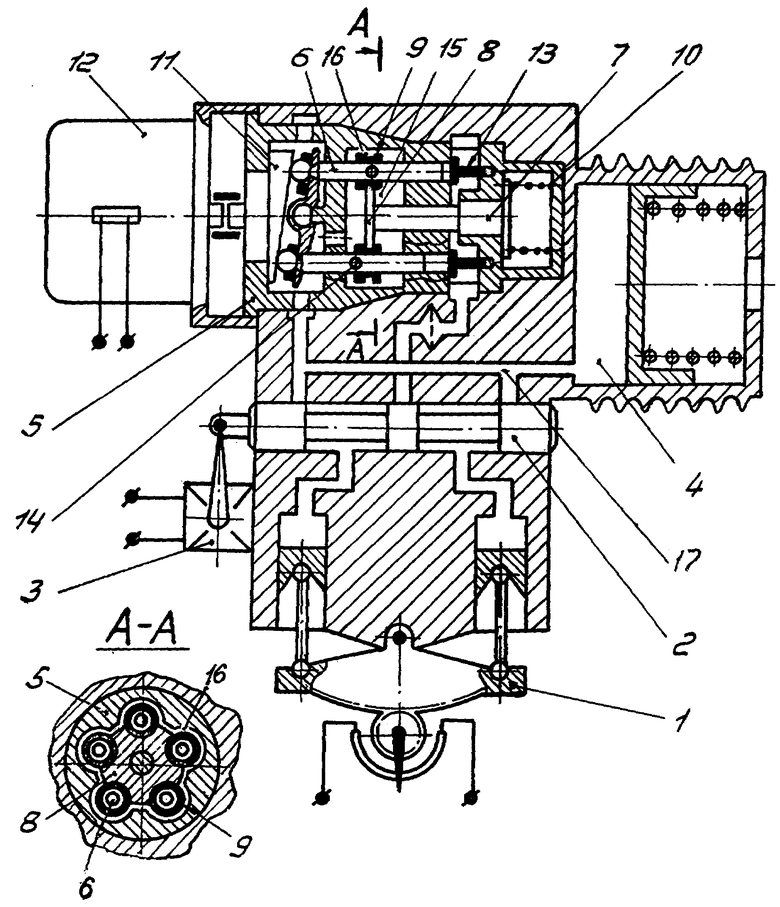
Автономный рулевой гидропривод, содержащий приводной электродвигатель и связанные между собой гидролиниями золотниковый распределитель, электромеханический преобразователь, гидродвигатель, бак и насос с клапанно-щелевым распределением, в корпусе которого размещены плунжеры, дроссель регулятора производительности, регулятор производительности, выполненный в виде подпружиненного дифференциального штока, жестко связанного при помощи диска с регулируемыми втулками, и камера, образованная углублением в корпусе и торцом диска, отличающийся тем, что, с целью улучшения динамических характеристик и увеличения надежности работы в условиях интенсивных внешних вибраций, камера, образованная углублением в корпусе и торцом диска, соединена с баком через дроссель, выполненный в виде щели, образованной с одной стороны контуром регулировочных втулок и связывающего их диска, а с другой стороны контуром расточек, выполненных в корпусе насоса, вокруг регулировочных втулок.
| Н.С.Гамынин, Гидравлический привод систем управления, М.: Машиностроение, 1972 г., стр.196, рис.5.14. |

