Предлагаемое устройство относится к области гидроакустики и может быть использовано при разработке средств гидроакустического противодействия.
Как известно, в спектре реального эхо-сигнала от протяженной цели, каковой является движущаяся подводная лодка (ПЛ) и неподвижная кильватерная струя от нее, имеются две основных частотных составляющих. Одна составляющая, частота которой сдвинута относительно частоты сигнала посылки гидролокационной станции (ГЛС) вследствие эффекта Допплера, обусловлена отражением от движущейся цели, а другая - совпадающая по частоте с частотой посылки (или близкая по частоте), обусловлена отражением от неподвижной кильватерной струи. Кроме этого реальный эхо-сигнал имеет, соответственно, большую протяженность во времени относительно сигнала посылки ГЛС и расширенный спектр каждой составляющей вследствие геометрической протяженности и сложной конфигурации реальной цели.
Известные имитаторы гидроакустических сигналов имитируют эхо-сигналы от движущейся цели путем магнитной записи и последующего воспроизведения сигналов посылок ГЛС, при этом имитируемые эхо-сигналы имеют лишь допплеровский сдвиг частоты, обусловленный движением самого имитатора, в то время как остальные параметры реального эхо-сигнала (наличие частотной составляющей от кильватерной струи, расширенный спектр и увеличенная длительность) - отсутствуют. Этот недостаток при современных методах частотного анализа спектров эхо-сигналов в ГЛС позволяет легко классифицировать ложные цели.
Предлагаемое устройство позволяет избежать отмеченных недостатков путем
- введения в тракт воспроизведения имитатора в дополнение к имеющейся воспроизводящей магнитной головке вращающегося блока электрически соединенных магнитных головок, перемещающихся относительно линейно движущегося магнитоносителя;
- введения генератора низкочастотного шумового сигнала с управляемым фильтром нижних частот для модуляции имитированных эхо-сигналов в тракте воспроизведения, а также введения блока управления шириной спектра шумового сигнала в зависимости от частоты имитированных эхо-сигналов. Благодаря вращающемуся блоку магнитных головок в тракте воспроизведения обеспечивается непрерывное воспроизведение сигналов с частотой, сдвинутой относительно частоты сигналов, воспроизводимых основной магнитной головкой. Получаемый при этом сигнал с частотным сдвигом имитирует эхо-сигнал от неподвижной кильватерной струи после движущейся цели, с частотой, близкой к частоте посылки ГЛС. Этот эффект достигается выбором скорости и направления вращения блока магнитных головок, причем и скорость и направление могут заранее устанавливаться в зависимости от программы маневра имитатора.
Кроме этого дополнительная временная задержка воспроизведения сигналов вращающимся блоком магнитных головок, расположенным после неподвижной магнитной воспроизводящей головки по ходу магнитоносителя, обеспечивает удлинение длительности имитированного эхо-сигнала по сравнению с длительностью принятого сигнала, что является характерным для эхо-сигналов от реальных целей.
Введение дополнительной шумовой амплитудной модуляции воспроизводимых сигналов с постоянной относительной шириной спектра позволяет уменьшить когерентность (корреляцию) эхо-сигналов, что характерно для эхо-сигналов, раскоррелированных в пределах углового размера протяженной цели.
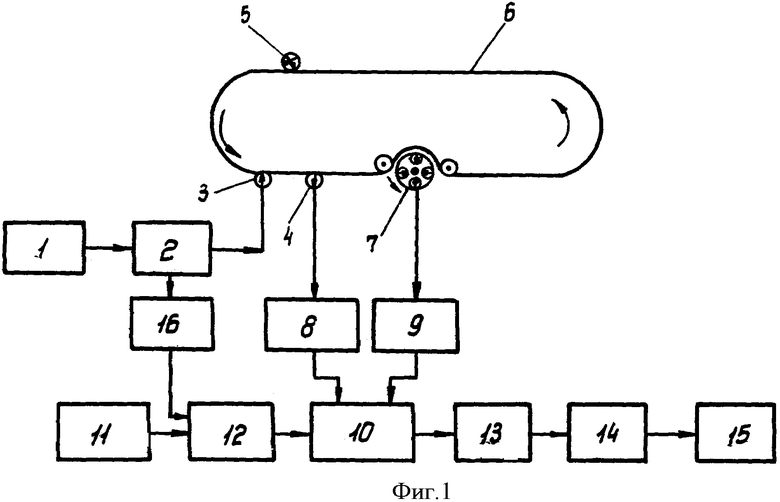
Предлагаемое устройство состоит из следующих узлов, представленных на фиг.1.
1 - приемник гидроакустических сигналов,
2 - усилитель записи,
3 - записывающая магнитная головка,
4 - воспроизводящая магнитная головка,
5 - стирающая магнитная головка,
6 - магнитоноситель,
7 - вращающийся блок воспроизводящих магнитных головок,
8 - усилитель воспроизведения,
9 - усилитель воспроизведения,
10 - смеситель сигналов,
11 - генератор шумового сигнала,
12 - управляемый фильтр нижних частот,
13 - фильтр верхних частот,
14 - усилитель мощности,
15 - излучатель гидроакустических сигналов,
16 - блок управления шириной спектра шумового сигнала.
На фиг.2 представлена кинематическая схема предлагаемого устройства, где сохранена предыдущая нумерация узлов. Как видно на этом чертеже, магнитоноситель 6 - например ферромагнитная лента, склеенная в кольцо, протягивается с постоянной скоростью мимо стирающей 5, записывающей 3 и неподвижной воспроизводящей головки 4, а также мимо вращающегося блока магнитных воспроизводящих головок 7, часть которого охватывается ферромагнитной лентой, при этом магнитный контакт с лентой имеет лишь одна головка. В блоке расположены несколько (в данном случае четыре) электрически соединенных воспроизводящих магнитных головок таким образом, что при вращении блока 7 обеспечивается непрерывность считывания с магнитоносителя сигнала, записанного головкой 3.
Работа предлагаемого устройства сводится к следующему. Акустический сигнал гидролокационной станции (ГЛС), принятый приемником 1, поступает через усилитель записи 2 на записывающую головку 3 и записывается на магнитоноситель 6. Записанный сигнал воспроизводится неподвижной магнитной головкой 4 и поступает через усилитель 8 в смеситель сигналов 10. Туда же через усилитель 9 поступает сигнал, воспроизведенный магнитными головками вращающегося блока 7, при этом частота этого сигнала будет отличаться от частоты сигнала, воспроизведенного неподвижной головкой 4 на величину Δf, которая определится как
где: υм - скорость протяжки магнитоносителя (мм/с),
υб - тангенциальная составляющая скорости вращающегося блока (мм/с),
f0 - частота сигнала, воспроизведенного неподвижной головкой 4.
Знак перед υб и, следовательно, перед Δf в формуле зависит от направления вращения блока 7.
На третий вход смесителя 10 поступает шумовой сигнал от генератора шума 11 через управляемый фильтр нижних частот 12, полоса которого устанавливается автоматически в зависимости от частоты принятого сигнала ГЛС с помощью блока управления шириной спектра шумового сигнала 16, связанного с усилителем записи 2.
С выхода смесителя 10 имитированный эхо-сигнал через фильтр верхних частот 15 и усилитель мощности 14 поступает на электроакустический преобразователь 15 и излучается в среду.
Имитатор гидроакустических эхо-сигналов содержит блок записи и воспроизведения сигналов с магнитоносителем и неподвижными магнитными головками, генератор шума, приемный тракт с антенной, усилителем и управляемым фильтром нижних частот. Фильтр нижних частот подключен к магнитной головке записи сигналов, тракт воспроизведения сигналов с антенной, усилителем мощности, подключенным к выходу фильтра верхних частот, и неподвижной магнитной головкой воспроизведения сигналов, соединенной через усилитель с одним из входов смесителя сигналов. В тракт воспроизведения сигналов введен дополнительный блок с несколькими вращающимися магнитными головками относительно магнитоносителя, электрически соединенными между собой. Выход дополнительного блока соединен с одним из входов смесителя сигналов. К другому из входов смесителя подключен выход генератора шума через управляемый фильтр низких частот. Выход этого смесителя соединен со входом указанного фильтра верхних частот. Технический результат - повышение достоверности имитации эхо-сигналов от геометрически протяженных движущихся морских объектов. 2 ил.
Имитатор гидроакустических эхо-сигналов, содержащий блок записи и воспроизведения сигналов с магнитоносителем и неподвижными магнитными головками, генератор шума, приемный тракт с антенной, усилителем и управляемым фильтром нижних частот, подключенный к магнитной головке записи сигналов, тракт воспроизведения сигналов с антенной, усилителем мощности, подключенным к выходу фильтра верхних частот, и неподвижной магнитной головкой воспроизведения сигналов, соединенной через усилитель с одним из входов смесителя сигналов, отличающийся тем, что, с целью повышения достоверности имитации эхо-сигналов от геометрически протяженных движущихся морских объектов, в нем в тракт воспроизведения сигналов введен дополнительный блок с несколькими вращающимися магнитными головками относительно магнитоносителя, электрически соединенными между собой, при этом выход этого блока соединен с одним из входов смесителя сигналов, к другому из входов смесителя подключен выход генератора шума через управляемый фильтр нижних частот, а выход этого смесителя соединен со входом указанного фильтра верхних частот.

