Изобретение относится к приемным устройствам импульсной информации, работающим в широком диапазоне параметров модуляции сигналов и предназначено для использования в системах радиотехнической разведки и пассивных системах целеуказания в качестве аппаратуры различения сигналов по виду внутриимпульсной модуляции и оценки параметров модуляции сложных сигналов.
В настоящее время известны устройства для различения сложных радиолокационных сигналов по виду внутриимпульсной модуляции и измерения их параметров модулирующих функций.
Устройство по авт. свид. №1840962 (заявка №1575094 с приоритетом от 21.02.1974 г.), в котором на основе автокорреляционного метода производится измерение девиации частоты радиосигналов с внутриимпульсной линейной частотной модуляцией (ЛЧМ) и числа перебросов фазы в коде фазоманипулированных 0, π (ФМ) сигналов, а также формируется признак вида модуляции поступившего сигнала. Недостатком известного устройства является низкая чувствительность измерительного канала, а также узкий диапазон изменения параметров модулирующих функций при измерении девиации частоты ЛЧМ сигналов.
Устройство по авт. свид. №1840967 по заявке №1584396 от 10.02.1975 г., которое выполняет функции, аналогичные устройству по авт. свид. №1840962, и отличается высокой чувствительностью измерительного канала при обработке ЛЧМ сигналов. Недостатком известного устройства является узкий диапазон параметров ЛЧМ сигналов при измерении девиации частоты.
Устройство по авт. свид. №1840896 по заявке №2206387 от 5.07.1976 г., которое выполняет функции, аналогичные первому и второму аналогам, отличается высокой чувствительностью и широким диапазоном изменения параметров ЛЧМ сигналов при измерении девиации частоты.
В рассмотренных аналогах измерение девиации частоты ЛЧМ сигналов производится автокорреляционным методом, в основу которого положено перемножение принятого (незадержанного) и опорного (задержанного) радиосигналов. При этом девиация частоты Δf определяется по формуле:
где τз - время задержки опорного сигнала в автокорреляторе;
τ - длительность огибающей принятого ЛЧМ сигнала;
Tб - период колебания напряжения биений на выходе автокоррелятора;

Анализ параметров зондирующих сигналов корабельных РЛС вероятного противника показал, что диапазон изменения длительностей и девиации частоты ЛЧМ сигналов составляет τ=4…20 мкс, Δf=4…10 МГц при коэффициентах сжатия B=30…200.
Для обеспечения высокой вероятности правильного опознавания типа РЛС и его носителя точность измерения девиации частоты должна быть порядка 0,25 МГц. Из формулы (1) видно, что для обеспечения такой точности время задержки опорного сигнала в автокорреляторе составит τз=2 мкс (K=0,25 МГц). При такой величине задержки происходит существенное укорочение длительности напряжения биений, которое особенно сказывается при анализе ЛЧМ сигналов, длительность которых близка к минимальной. Укорочение напряжения биений приводит к ошибкам измерения девиации частоты. Например, при длительности ЛЧМ сигнала τ=4 мкс и девиации Δf=10 МГц ошибка измерения за счет потери части длительности составляет 5 МГц и существенно превышает допустимую.
Таким образом, известные анализаторы автокорреляционного типа, рассмотренные в качестве прототипов, имеют общий недостаток - низкую точность измерения девиации частоты ЛЧМ сигналов за счет потерь части информации о девиации, обусловленных укорочением сигнала биений на выходе автокоррелятора.
Одной из важных задач в современных системах радиотехнической разведки и пассивных системах целеуказания является увеличение точности измерения параметров перехваченных радиолокационных сигналов, в том числе и девиации частоты. Решение этой задачи позволяет повысить вероятность правильного распознавания типов РЛС и их носителей.
По технической сущности наиболее близким к заявляемому объекту является устройство по авт. свид. №1840896, описанное в заявке №2206387, которое и выбираем в качестве прототипа.
Известное устройство содержит блок обработки ФМ сигнала, автокоррелятор, формирователь управляющих импульсов, схему формирования признака ЛЧМ, схему измерения девиации частоты и схему коммутации. Входы блока отработки ФМ сигнала, автокоррелятора и формирователя управляющих импульсов соединены вместе и являются входами устройства. Первый и второй входы блока обработки ФМ сигнала соответственно подключены к первому и второму входам схемы коммутации. Выход автокоррелятора, через схему формирования признака ЛЧМ подключен к третьему входу схемы коммутации; выход автокоррелятора через схему измерения девиации частоты подключен также к четвертому входу схемы коммутации.
Первый и второй выходы формирователя управляющих импульсов соответственно подключены ко второму входу блока обработки ФМ сигнала, входу стробирования схемы измерения девиации частоты и ко входам сброса блока обработки ФМ сигнала, схемы формирования признака ЛЧМ, схемы измерения девиации частоты.
Недостатком известного устройства, как было отмечено ранее, является низкая точность измерения девиации частоты ЛЧМ сигналов в широком диапазоне изменения их параметров, обусловленная потерей части информации о девиации частоты за счет укорочения длительности сигнала биений.
Целью настоящего изобретения является повышение точности измерения девиации частоты ЛЧМ сигналов в широком диапазоне изменения их параметров.
Поставленная цель достигается тем, что в известное устройство, содержащее блок обработки ФМ сигнала, автокоррелятор, формирователь управляющих импульсов, схему формирования признака ЛЧМ, схему измерения девиации частоты и схему коммутации, выходы блока обработки ФМ сигнала, автокоррелятора, формирователя управляющих импульсов соединены вместе и являются входом устройства, а первый и второй выходы блока обработки ФМ сигнала соответственно подключены к первому и второму входам схемы коммутации, выход автокоррелятора через схему формирования признака ЛЧМ сигнала, а также через схему измерения девиации частоты подключен к третьему и четвертому входам схемы коммутации, второй вход блока обработки ФМ сигнала и вход стробирования схемы измерения девиации частоты соединен вместе и подключены к первому выходу формирователя управляющих импульсов, второй выход которого подключен ко входам сброса блока обработки ФМ сигнала, схемы формирования признака ЛЧМ, схемы измерения девиации частоты введены компаратор, ждущий мультивибратор, схема "И", сумматор, счетчик, причем выход автокоррелятора через компаратор подключен к первому входу схемы "И" и ко входу ждущего мультивибратора, выход которого соединен со вторым входом схемы "И", первый и второй входы сумматора соответственно подключены к выходам схемы измерения девиации частоты и счетчика, четвертый вход схемы коммутации соединен с выходом сумматора, выход схемы "И" подключен к первому входу счетчика, второй выход формирователя управляющих импульсов подключен ко второму входу счетчика, первый выход формирователя управляющих импульсов соединен со входом управления ждущего мультивибратора.
Введение в известное устройство указанных элементов и связей позволило уменьшить потери информации о величине девиации частоты за счет укорочения длительности напряжения сигнала биений на выходе автокоррелятора, что в результате приводит к повышению точности измерения девиации частоты ЛЧМ сигналов в широком диапазоне изменения их параметров.
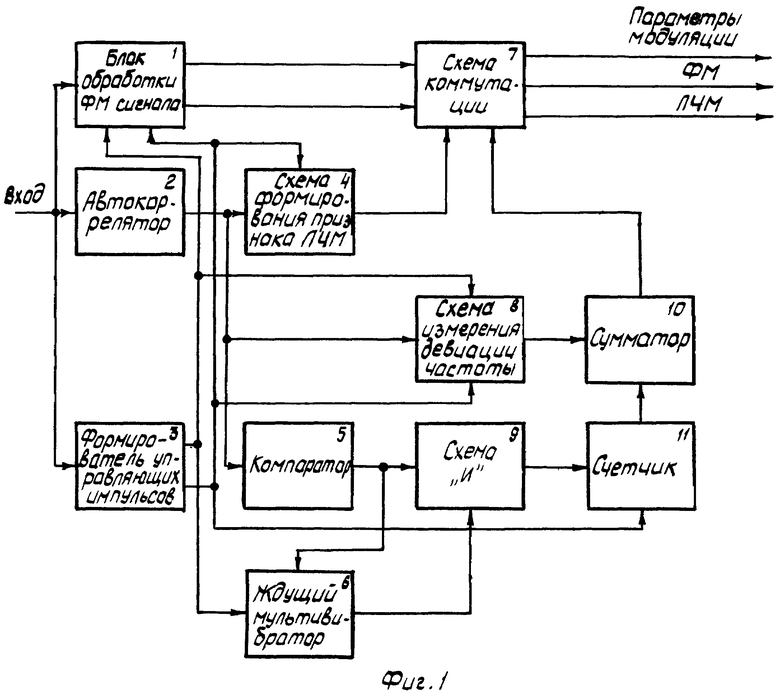
На фиг.1 изображена функциональная схема предлагаемого устройства.
Устройство содержит блок обработки ФМ сигнала 1, автокоррелятор 2, формирователь управляющих импульсов 3, схему формирования признака ЛЧМ 4, компаратор 5, ждущий мультивибратор 6, схему коммутации 7, схему измерения девиации частоты 8, схему "И" 9, сумматор 10, счетчик 11.
Входы блока обработки ФМ сигнала 1, автокоррелятора 2 и формирователя управляющих импульсов 3 соединены вместе и являются входом устройства. Первый и второй выходы блока обработки ФМ сигнала 1 соответственно подключены к первому и второму входам схемы коммутации 7. Выход автокоррелятора 2 подключен к соединенным вместе входам схемы 4 и схемы 8, а также через компаратор 5 к первому входу схемы "И" 9 и ко входу ждущего мультивибратора 6, выход которого подключен ко второму входу схемы "И" 9. Выход схемы 4 подключен к третьему входу схемы коммутации 7, четвертый вход которой соединен с выходом сумматора 10. Выход схемы измерения девиации частоты 8 подключен к первому входу сумматора 10, второй вход которого соединен с выходом счетчика 11. Первый вход счетчика 11 подключен к выходу схемы "И" 9. Первый и второй выходы формирователя управляющих импульсов 3 подключены соответственно к стробирующим входам блока обработки ФМ сигнала 1, схемы измерения девиации частоты 8, управляющему входу ждущего мультивибратора 6 и ко входам сброса блока обработки ФМ сигнала 1, схемы формирования признака ЛЧМ 4, схемы измерения девиации частоты 8, счетчика 11.
Выходами устройства являются три выхода схемы коммутации 7: выход "Параметры модуляции", выход "ФМ" и выход "ЛЧМ".
Рассмотрим работу предлагаемого устройства. Блок обработки ФМ сигнала 1 реализован на основе квадратурного автокоррелятора и инвариантен к простым и ЛЧМ сигналам, т.е. выдает информацию через схему коммутации 7 на выходы "Параметры модуляции" и "ФМ" только при поступлении на вход устройства ФМ сигналов.
Отклик автокоррелятора 2 на ЛЧМ сигнал представляет отрезок гармонического напряжения биений постоянной частоты длительностью τб=τ-τз. При этом в схеме формирования 4 вырабатывается импульс признака приема ЛЧМ сигнала, который через схему коммутации 7 поступает на выход "ЛЧМ" предлагаемого устройства.
Биполярное напряжение биений с выхода автокоррелятора 2 поступает на схему измерения девиации частоты 8, на выходе которой формируется в виде двоичного кода информация о количестве полупериодов биений за время τ-τз.
Вследствие того, что сигнал биений на выходе автокоррелятора 2 укорочен на величину задержки τз, код на выходе схемы 8 не соответствует значению девиации частоты принимаемого сигнала, т.е. записан с ошибкой.
Биполярное напряжение биений поступает также на компаратор 5, на выходе которого формируются короткие видеосигналы, количество которых соответствует количеству переходов напряжения биения через ноль.
Ждущий мультивибратор 6 запускается видеоимпульсом компаратора 5 и управляется с первого выхода формирователя управляющих импульсов 3 таким образом, что на его выходе за время длительности огибающей принятого ЛЧМ сигнала формируется только один видеосигнал длительностью τз, открывающий схему "И" 9, вследствие чего видеоимпульсы с выхода компаратора 5 поступают на счетчик 11. На выходе счетчика формируется код их количества за время τз т.е. корректирующий код, соответствующий потере информации о девиации частоты ЛЧМ сигнала, возникающей за счет укорочения длительности сигнала биений. В сумматоре 10 происходит суммирование кодов, которые поступают с выходов счетчика 11 и схемы измерения девиации частоты 8. В результате на выходе сумматора 10 образуется суммарный код, соответствующий значению девиации частоты принятого ЛЧМ сигнала, который через схему коммутации 7 поступает на выход "Параметры модуляции" устройства. Первый выход формирователя управляющих импульсов 3 подключен к стробирующим входам блока обработки ФМ сигнала 1, схемы измерения девиации частоты 8 и открывает их на время длительности принимаемого сигнала, что способствует повышению помехозащищенности устройства. Сигналы со второго выхода схемы 3 поступают на входы сброса блока 1, схемы 4, счетчика 11, схемы измерения девиации частоты 8 и осуществляют сброс информации, подготавливая анализатор к обработке следующего сигнала.
Все узлы предлагаемого устройства выполнены по известным типовым схемам.
Таким образом, предлагаемое устройство позволяет получить новый эффект - повышение точности измерения девиации частоты ЛЧМ сигналов в широком диапазоне изменения их параметров модуляции. Например, при длительности огибающей ЛЧМ сигналов τ=4 мкс, одинаковых величинах задержки сигналов в автокорреляторах известного (прототипа) и предлагаемого устройств и равных τз=2 мкс точность измерения девиации частоты предлагаемого устройства в 5÷8 раз выше точности известного устройства.
Это позволяет в системах радиотехнической разведки и пассивных системах целеуказания улучшить качество решения задач селекции и идентификации сигналов, повысить вероятность правильного распознавания типов РЛС и их носителей, а также повысить эффективность радиоэлектронного подавления РЛС вероятного противника системами радиопротиводействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 1979 |
|
SU1840924A1 |
| АНАЛИЗАТОР ПАРАМЕТРОВ СЛОЖНЫХ СИГНАЛОВ | 1977 |
|
SU1840900A1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 1983 |
|
SU1841012A1 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА ПАРАМЕТРОВ СЛОЖНЫХ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1980 |
|
SU1840931A2 |
| УСТРОЙСТВО АНАЛИЗА ПАРАМЕТРОВ МОДУЛЯЦИИ ИМПУЛЬСНЫХ СИГНАЛОВ | 1976 |
|
SU1840896A1 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА ПАРАМЕТРОВ СЛОЖНЫХ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1978 |
|
SU1840877A1 |
| РАЗЛИЧИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ С ВНУТРИИМПУЛЬСНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1981 |
|
SU1840935A1 |
| Устройство для определения вида внутриимпульсной модуляции | 1987 |
|
SU1841025A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВНУТРИИМПУЛЬСНОЙ МОДУЛЯЦИИ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 1987 |
|
SU1841022A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДУЛЯЦИИ ИМПУЛЬСНЫХ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ И ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 1974 |
|
SU1840962A1 |
Изобретение относится к приемным устройствам. Достигаемый технический результат - повышение точности измерения девиации частоты. Указанный результат достигается за счет того, что анализатор содержит блок обработки фазоманипулированного сигнала, блок коммутации, автокоррелятор, формирователь управляющих импульсов, блок измерения девиации частоты, блок формирования признака линейной частотной модуляции, компаратор, ждущий мультивибратор, элемент И, сумматор, счетчик, соединенные между собой определенным образом. 1 ил.
Анализатор параметров модуляции сложных сигналов, содержащий блок обработки фазоманипулированного сигнала (ФМ), выходы которого подключены к блоку коммутации, первый вход подключен к входу устройства и входам автокоррелятора и формирователя управляющих импульсов, два выхода которого соединены со вторым и третьим входами блока обработки ФИ сигнала, со вторым и третьим входами блока измерения девиации частоты, первый вход которого и второй вход блока формирования признана линейной частотной модуляции (ЛЧМ) соединены с выходом автокоррелятора, причем третий вход блока обработки ФМ сигнала соединен с первым входом блока формирования признана ЛЧМ, выход которого подключен к третьему входу блока коммутации, отличающееся тем, что с целью повышения точности намерения девиации частоты ЛЧМ сигналов введены компаратор, ждущий мультивибратор, элемент "И", сумматор, счетчик, причем выход автокоррелятора через компаратор подключен к первому входу элемента "И" и входу ждущего мультивибратора, выход которого соединен со вторым входом элемента "И", выход которого соединен с первым входом счетчика, второй вход счетчика подключен ко второму выходу формирователя управляющих импульсов, а выход к первому входу сумматора, второй вход которого соединен с выходом блока измерения девиации частоты, а выход - с четвертым входом блока коммутации, управляющий вход ждущего мультивибратора соединен с первым выходом формирователя управляющих импульсов.
| Авт | |||
| свид | |||
| УСТРОЙСТВО АНАЛИЗА ПАРАМЕТРОВ МОДУЛЯЦИИ ИМПУЛЬСНЫХ СИГНАЛОВ | 1976 |
|
SU1840896A1 |

