Известен способ автоматической поверки измерительных приборов путем подачи на поверяемый прибор непрерывно возрастающего (убывающего) входного сигнала, воздействующего на указатель прибора, определения моментов совмещения указателя с поверяемыми отметками шкалы и измерения соответствующих этим моментам времени значений входного сигнала.
Предложено поверку осуществлять при разных, например при двух, скоростях изменения входного сигнала, соотношение которых известно, и по разнице найденных для этих скоростей величин погрещностей каждой из поверяемых отметок шкалы и известному значению кратности скоростей изменения входного сигнала определять величину динамической ошибки.
Это отличие способствует исключению динамической ошибки, вызываемой отставанием указателя поверяемого прибора от положения, определяемого входным сигналом.
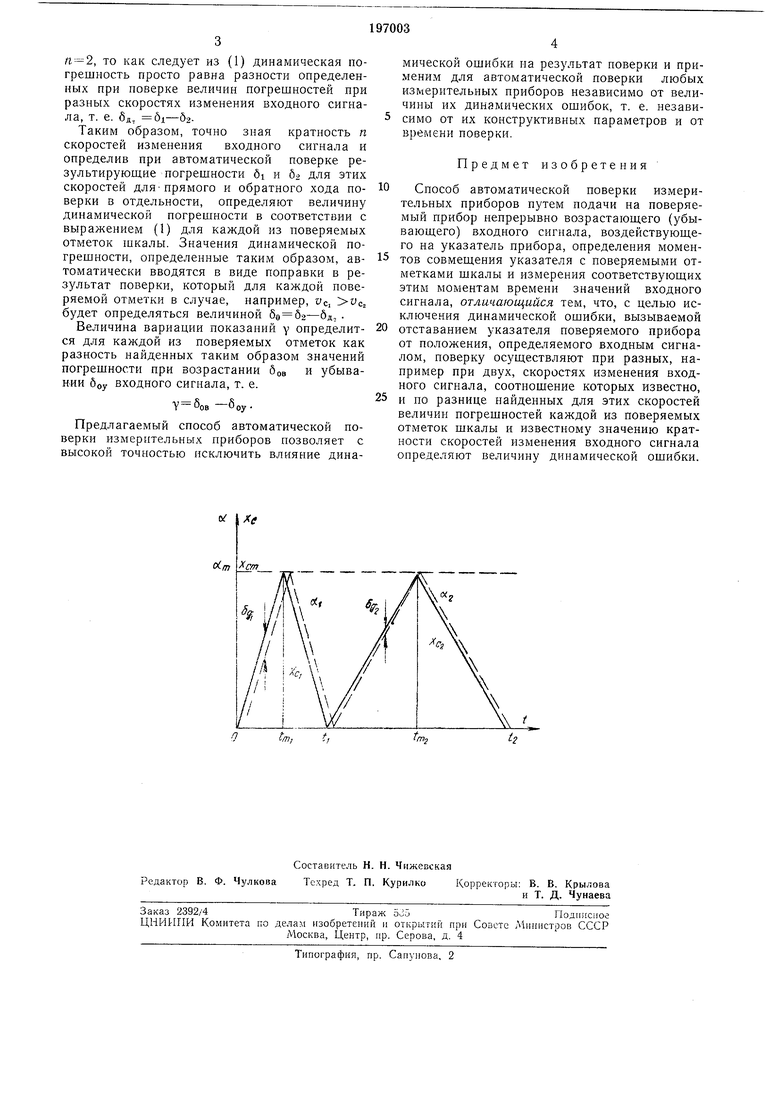
На чертеже приведен график зависимости изменения входного сигнала Хс и соответствующего отклонения а подвижной части во времени для двух скоростей и и
УС, К, UeJ.
При отноптении скоростей Ос, /УС. п соотношение динамических погрешностей будет таким
бд, Пбд,.
Результирующая погрешность б для каждой из поверяемых отметок шкалы прибора при непрерывном изменении входного сигнала будет определяться суммой погрешности бо для данной поверяемой отметки и динамической погрешности 6д, соответствующей определенной скорости v, т. е.
о Зо + Од.
Погрешность бо не зависит от скорости УС и присуща данной отметке шкалы поверяемого прибора. При поверке со скоростью изменения входного сигнала УС, имеем
б1 бо-1-бд бо+п,бд, , а при поверке со скоростью f с, -
б2 бо+бд, .
Разность результирующих погрешностей, определенных для каждой поверяемой отметки при двух скоростях изменения входного
сигнала УС, и Уса в одном из направления. даст
6i-б2 г6д,, -бд, бд, (п-1).
()
, то как следует из (1) динамическая погрешность просто равна разности определенных при поверке величин погрешностей при разных скоростях изменения входного сигнала, т. е. бд, 6i-62Таким образом, точно зная кратность п скоростей изменения входного сигнала и определив при автоматической поверке результирующие погрешности 6i и б для этих скоростей для-прямого и обратного хода поверки в отдельности, определяют величину динамической погрешности в соответствии с выражением (1) для каждой из поверяемых отметок шкалы. Значения динамической погрешности, определенные таким образом, автоматически вводятся в виде поправки в результат поверки, который для каждой поверяемой отметки в случае, например, Uc, Wcj будет определяться величиной 60 62-бд, .
Величина вариации показаний у определится для каждой из поверяемых отметок как разность найденных таким образом значений погрешности при возрастании бое и убывании боу входного сигнала, т. е.
-боу.
Предлагаемый способ автоматической поверки измерительных приборов позволяет с высокой точностью исключить влияние динамической ошибки на результат поверки и применим для автоматической поверки любых измерительных приборов независимо от величины их динамических ошибок, т. е. независимо от их конструктивных параметров и от времени поверки.
Предмет изобретения
0 Способ автоматической поверки измерительных приборов путем подачи на поверяемый прибор непрерывно возрастающего (убывающего) входного сигнала, воздействующего на указатель прибора, определения моментов совмещения указателя с поверяемыми отметками шкалы и измерения соответствующих этим моментам времени значений входного сигнала, отличающийся тем, что, с целью исключения динамической ошибки, вызываемой
отставанием указателя поверяемого прибора от положения, определяемого входным сигналом, поверку осуществляют при разных, например при двух, скоростях изменения входного сигнала, соотношение которых известно, и по разнице найденных для этих скоростей величин погрешностей каждой из поверяемых отметок шкалы и известному значению кратности скоростей изменения входного сигнала определяют величину динамической ошибки.
iff,Г/
