Известны электродвигатели, содержащие безобмоточный ротор с явновыраженными несимметричными полюсами и явнополюсный статор € двухфазной обмоткой, электропитание которой осуществляется импульсами постоянного напряжения через транзисторный коммутатор, управляемый полупроводниковым мультивибратором.
Однако известные двигатели не обеспечивают достаточно высокого пускового момента и изменения скорости вращения, в широких пределах в зависимости от нагрузки. Этот недостаток обусловлен тем, что переключение обмоток осуществляется в моменты, соответствующие относительно неизменному положению полюсов ротора и статора. В двигателе по изобретению упомянутый недостаток устраняется применением автоматического регулирования в зависимости от нагрузки и скорости. Для этого последовательно с обмотками статора подсоединен дроссель, так что напряжение на дросселе используется для управления частотой мультивибратора.
Дроссель может быть выполнен в виде катуШКИ индуктивности без сердечника, один из выводов которой подсоединен к отрицательному полюсу источника питания, а к другому выводу параллельно подсоединены статорные обмотки и переменные сопротивления базоьых цепей транзисторов мультивибратора. Последовательно с сопротивлениями базовых цепей транзисторов мультивибратора соединены термисторы.
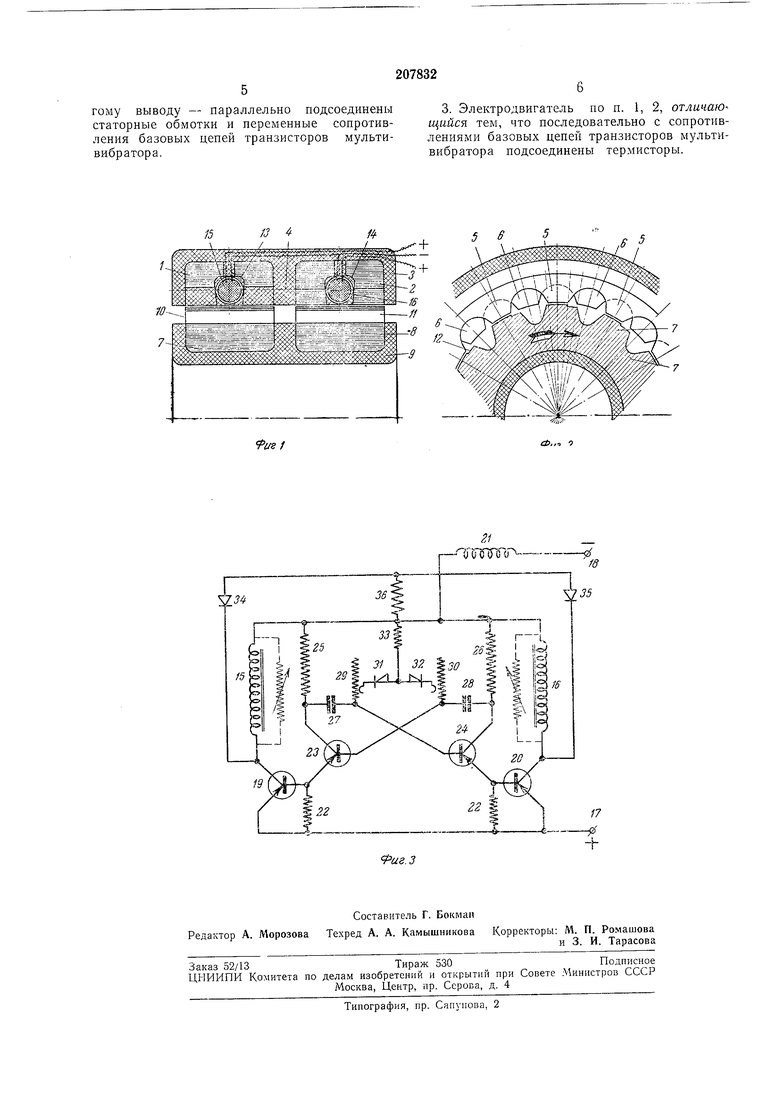
На фиг. 1 и 2 в качестве примера показан один из возможных конструктивных вариантов выполнения двигателя ( на фиг. 1 - частичный продольный разрез, а на фиг. 2 - частичный поперечный разрез); на фиг. 3 приведена электросхема двигателя.
Статор двигателя образован двумя магнитопроводами / и 2 из мягкого магнитного материала, размещенными в корпусе 3 из пластмассы, предпочтительно термостойкой. Средняя часть 4 этого корпуса образует перегородку, разделяющую магнитопроводы и исключающую взаимное магнитное влияние. Оба статора смещены на половину полюсного шага, как это показано на фиг. 2. Полюсы статоров выполнены в виде зубцов 5 и 6. Ротор двигателя состоит из двух частей 7 и S, выполненных из магнитомягкс. о материала, укрепленных в пластмассовом корпусе 9 и магнитноизолированных друг от друга. По окружности обоих роторов расположены выступающие полюсы 10 и 11.
чем ширина полюсов статора, и они вблизи одной из их кромок имеют меньшую радиальную высоту, чем в остальной части, где ширина их равна ширине полюсов статора. В этой низкой части 12 полюсы ротора имеют форму слегка коническую таким образом, чтобы создать в тот момент, когда эта часть проходит перед зубцами статора, воздушное пространство прогрессивно убываюш,ее. Оба статора / и 2 на нижней поверхности имеют овалообразную часть 13 и 14. В каждой из них помеш,ена кольцевая обмотка 15 и 16 из изолированных проводов, например эмалированных таким образом, чтобы линии магнитного потока замыкались в радиальных плоскостях вокруг обмотки через статор, воздушное пространство и ротор.
Благодаря такому расположению и форме зубцов ротора, двигатель запускается автоматически при последовательной посылке двух однополярных импульсов в обмотки 15 и 16, включенные параллельно между зажимами 17 и 18 источника электропитания ,(фиг. 3). Каждая обмотка двигателя 15 и 16 соединена последовательно с коллектором 10Ш1ных полупроводников триодов 19 и 2U, и общая точка обмоток соединена с отрицательным полюсом (выводом минус), последовательно с дросселем 21, выполненным в виде катушки индуктивности без сердечника. Полупроводниковые триоды 19 к 20 ь схеме выбраны типа PNP. Эмиттеры этих двух полупроводниковых триодов присоединены к положительному полюсу (выводу) 17 источника питания. Их базы соединены с положительрым полюсом (выводом) через блокируюш,ее сопротивление 22 н с эмиттерами полупроводниковых триодов - генераторов колебаний - мультивибратора 23 и 24. Коллекторы этих полупроводниковых триодов 23 и 24 соединены последовательно с сопротивлением 25 и 26, рграничиваюш,им электроток управления мощного каскада величиной, допустимой для полупроводниковых триодов - генераторов колебаний 23 и 24. База каждого из полупроводниковых триодов мультивибратора 23 и 24 присоединена к коллектору другого через конденсаторы (емкости) 27 к 28 и к отрицательному выводу (полюсу) источника через сопротивления 29 и 30, которые в данном случае являются переменными, что позволяет регулировать частоту генератора колебаний. Оба полупроводниковых триода-мультивибратора попеременно закрыты или открыты под действием последовательных заряда или разряда конденсаторов 27 и 28. Эта система приходит в колебательное движение немедленно с включением схемы под электронапряжение, так как всегда имеется ассиметрия омического сопротивления или емкостного одной из групп (сопротивление - конденсатор) по отношению к другой.
действия такого генератора колебаний почти равна 0,7 С.
Оба термистора 31 и 32 соединены последовательно с сопротивлениями 29 и 30 цепочки
С таким образом, чтобы вызвать автоматически в течение короткого времени при включении схемы под электронапряжение, увеличение постоянной времени генератора колебаний и тем самым улучшить условия пуска двитателя. Сопротивление 33 позволяет регулировать постоянную времени цепочки.
Два диода 34 и 35 подсоединены параллельно на каждую из обмоток 15 и 16 двигателя и
последовательно с сопротивлением 36, общим для двух обмоток. При посылке импульса тока в одну из обмоток двигателя соответствующая ориентация диода не позволяет импульсу тока пробить сопротивление 36. После отсечки этого тока энергия, накопленная в обмотке и магнитной цепи, сможет рассеиваться в сопротивлении 36. Энергия, накопленная в обмотке и ее магнитной цепи, вызывает при отключении цепи перенапряжение, которое
будет функцией от скорости переключения полупроводниковых триодов. Система диод и сопротивление предназначена ограничивать это сверхнапряжение до величины, допустимой для полупроводникового триода, но выгодно сделать это сопротивление еще большим, чем это требуется при сверхнапряжении, допустимом для полупроводника, для того чтобы ток, продолжающий циркулировать после отключения в обмотке двигателя, не вызвал бы остаточного магнитного поля, способного производить торможение двигателя.
Эту задачу можно решить, заменив диоды 34 л 35 - сопротивление 36 тиритами 37 и 38 или переменными сопротивлениями, подсоединенными параллельно с обмотками двигателя,,
Предмет изобретения
1.Электродвигатель, содержащий безобмоточный ротор с явновыраженными несимметричными полюсами и явнополюсный статор с двухфазной обмоткой, электропитание которой
осуществляется импульсами постоянного напряжения через транзисторный коммутатор, управляемый полупроводниковым мультивибратором, отличающийся тем, что, с целью повышения пускового момента и получения переменной скорости вращения, обратно пропорциональной нагрузке на валу, последовательно с обмотками статора включен дроссель, так что напряжение на дросселе используется для управления частотой мультивибратора.
2.Электродвигатель по п. 1, отличающийся тем, что дроссель выполнен в виде катушки индуктивности без сердечника, один из выводов которой подсоединен к отрицательному
тому выводу - параллельно подсоединены статорные обмотки и переменные сопротивления базовых цепей транзисторов мультивибратора.
3. Электродвигатель по п. 1, 2, отличающийся тем, что последовательно с сопротивлениями базовых цепей транзисторов мультивибратора подсоединены термисторы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Синхронный редукторный электродвигатель | 1989 |
|
SU1713077A1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1993 |
|
RU2072612C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1994 |
|
RU2123754C1 |
| ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2279173C2 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2017 |
|
RU2658636C1 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2019 |
|
RU2702615C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2009599C1 |
| ДВУХФАЗНЫЙ НЕРЕВЕРСИВНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2266604C1 |
| КОНСТРУКЦИЯ СТАТОРА ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ МАЛОЙ МОЩНОСТИ | 2012 |
|
RU2505909C2 |
/
О},,-, 1
