/1
Предлагается прибор, который относится к области механизации графических построений и аналитических вычислений при топологическом преобразовании плоских полей, основанном на винтовом проектировании. Прибор позволяет по заданной винтовой проекции нормального сечения, например фасонной проволоки в спиральном канате, построить ее нормальное сечение. Для этого он содержит устанавливаемую на чертежной доске прямолинейную направляющую, смонтированную на ней с помощью каретки перпендикулярную линейку, несущую два ползуна с обводным и пишущим штифтами. Ползуны связаны тросо-блочной передачей с вариатором скоростей. Ползун с обводным штифтом шарнирно связан с поворотной штангой.
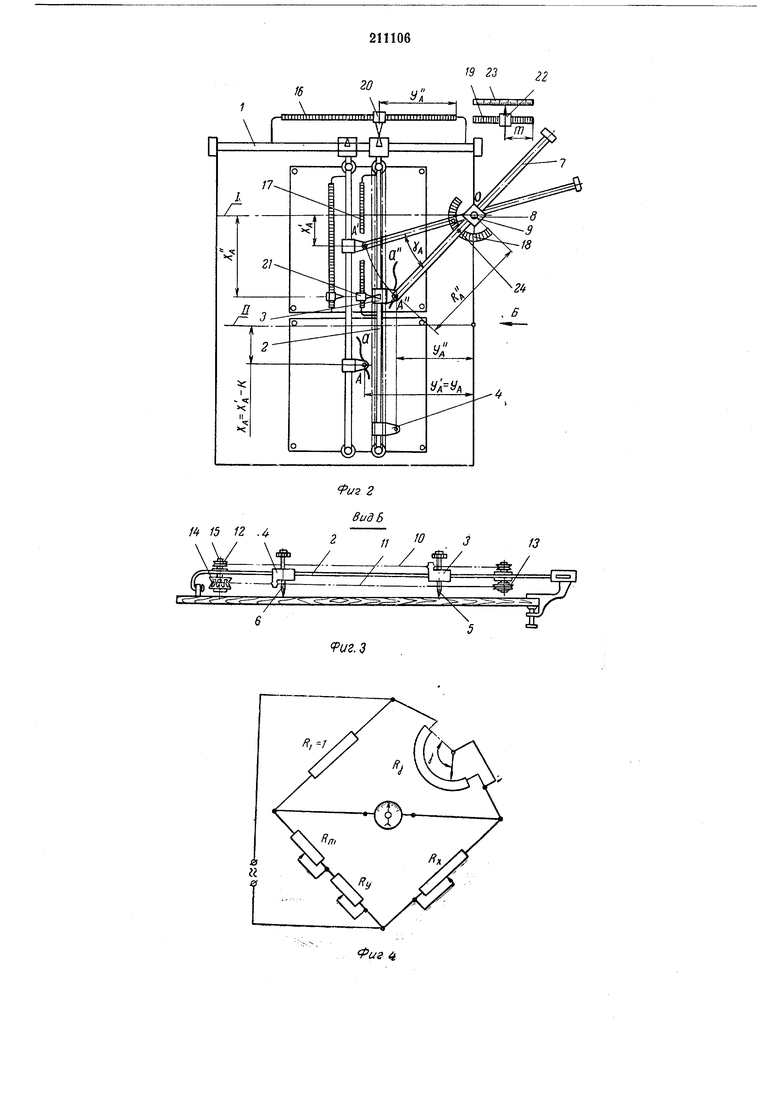
Для автоматического определения необходимого угла поворота у штанги в приборе имеется электрическое счетно-решающее устройство, которое представляет собой множительно-делительную мостовую схему. Эта схема состоит из двух линейных потенциометров, сопротивления которых соответственно эквивалентны текущим координатам X к Y точек косого сечения, отрабатывающего линейного потенциометра с сопротивлением, эквивалентным tgv, линейного потенциометра с сопротивлением, эквивалентным определенному диапазону постоянных величин т, и сопротивления, равного
выбранной масштабной единице сопротивления.
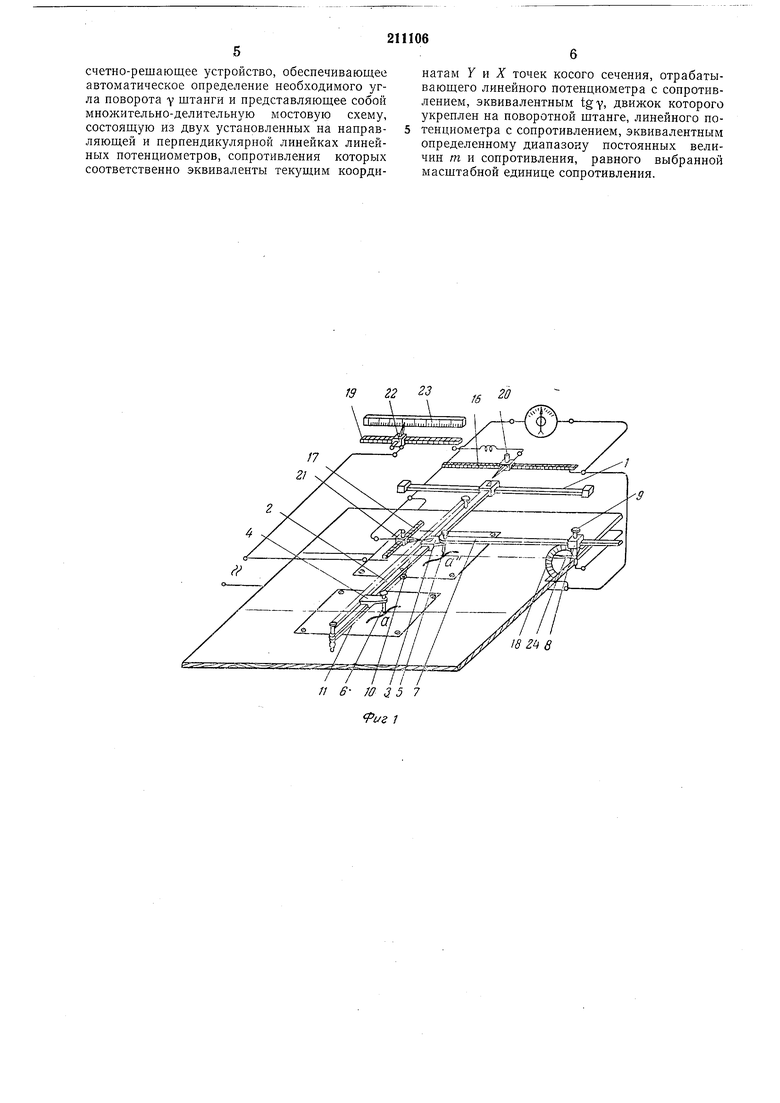
На фиг. 1 изображен общий вид предлагаемого прибора; на фиг. 2 - то же, вид сверху; на фиг. 3 - вид по стрелке Б на фиг. 2; на фиг. 4-электрическая схема счетно-решающего устройства.
Прибор содержит устанавливаемую на чертежной доске прямолинейную направляющую /, смонтированную на ней при помощи каретки перпендикулярную линейку 2, несущую два ползуна 3 и 4 с обводным и пишущим штифтами 5 и 6. С ползуном 3 шарнирно соединена через штифт 5 поворотная штанга 7,
проходящая через опору 8, центр которой совпадает с геометрическим центром поворота кругового преобразования.
Поворотная штанга 7 фиксируется относительно опоры 8 винтом 9 для установки величины постоянного радиуса-вектора К. для выбранной точки А косого сечения винтовой поверхности а, текущие координаты которой ХА и Ул .
Ползуны 3 и 4 связаны тросо-блочной передачей, состоящей из гибких тросиков 10 и 11, шкивов 12 н 13 с диаметрами Д1 и Д2 и вариатора скоростей 14, который изменяет диаметр Дз привода в определенном диапазоне. Приводной шкив 12 и вариатор скоростей жестко Движение от ползуна 3 передается гибкому тросику 10 и через шкив 12, приводной вал 15 вариатору скоростей 14, тросику 11 и ползуну 4. Ветви тросо-блочной передачи движутся с разными скоростями Vi и 1/2, отношение которых пропорционально отношению диаметров Ml и Д-2, т. е. - -l--J K Uz D, где К - постоянный коэффициент преобразования, а К где q - коэффициент аффиного преобразования. При перемещении ползуна 3 на величину ХА от оси соответствия /-/ ползун 4 передвинется на величину ХА К. ХА от оси соответствия //-//. Для определения угла поворота у штанги 7, т. е. любой точки поля, служит электрическое счетно-решаюшее устройство, представляющее собой множительно-делительную мостовую схему. В эту схему входят два линейных потенциометра 16, 17, сопротивления Rx и RY которых соответственно эквивалентны текущим координатами .А и У точек косого сечения, отрабатываюш.ий линейный потенциометр 18 с сопротивлением Ri, эквивалентным tg у, линейный потенциометр 19 с сопротивлением К„, эквивалентным определенному диапазону постоянных величин т и сопротивления Я, равного выбранной масштабной единице сопротивления. Потенциометр 16 с сопротивлением Ry связан с направляющей / и движок 20 потенциометра фиксирует координату Y. С линейкой 2 жестко соединен потенциометр 17 с сопротивлением Rxr движок 21 которого установлен против риски ползуна 3 и фиксирует координату X. Движок 22 линейного потенциометра 19 с сопротивлением 7,; установлен против постоянной величины т на шкале 23. Движок 24 отрабатывающего потенциометра с сопротивлением Rt укреплен на поворотной штанге 7. Если мост сбалансирован, т. е. в случае отсутствия напряжения в диагонали моста, то КХА ( т. е. угол поворота у штанги 7 выражен через эквивалентные сопротивления. При заданных величинах R и Ry для ТОЧКИ А и введении дополнительного значения Rm и R-, мостовая схема балансируется. ое движение радиуса-вектора RA точки А пределит угол поворота у штанги 7. Перед началом работы с прибором на одной асти чертежной доски укрепляют чертеж с зображением косого сечения винтовой поерхности а таким образом, чтобы ось соотетствия /-/ на доске и на проекции совпали. На другой части доски помещают лист бумаги с осью соответствия //-//, параллельной оси /-/, Далее устанавливают по шкале 23 сопротивление на потенциометре 19. На вариаторе скоростей 14 устанавливают диаметр Дд так, чтоDiДля преобразования косого сечения а в ее нормальное сечение а делают два ряда точек этого сечения. Обводной штифт 5 ползуна 3 устанавливают на точке А и винтом 9 фиксируют штангу 7, сохраняя постоянной величину RA- При этом нулевая точка потенциометра 18 с сопротивлением ,. совпадает с прямой ОА, а потенциометр 19 заторможен. Устанавливают движки 21 и 20 потенциометров 17 и 16 против рисок на ползунах, введя таким образом в электрическую схему сопротивления R и R у , эквивалентные текущим координатам точки А (Хл и YA Мостовая схема окажется разбалансированной. Поворотом штанги 7, с которой жестко связан движок 24 потенциометра 18, вводят в схему сопротивление RyA- При этом штаяга 7 Повернется на угол ул, а ползун 3 переместится, и штифт 5 обведет дугу с радиусом RA, фиксируя точку А , с -координатами X и У относительно оси соответствия /-/. Ползун 4 с пишущим штифтом 6 переместится при помощи тросо-блочной передачи, и штифт 6 зафиксирует точку А с координатами и относительно оси соответствия //-//. Таким же приемом находят ряд преобразованных точек, соединяя которые, получают нормальное сечение а винтовой поверхности по заданному косому сечению а. Предмет изобретения Прибор для точечного преобразования косого сечения винтовой поверхности в ее нормальное сечение, отличающийся тем, что, с целью механизации процесса, он, содержит устанавливаемую на чертежной доске прямолинейную направляющую, смонтированную на ней с помощью каретки перпендикулярную линейку, несущую два ползуна с обводным и пишущим штифтами, связанных тросо-блочной передачей с вариатором скоростей, поворотную штангу, шарнирно соединенную с ползусчетно-решающее устройство, обеспечивающее автоматическое определение необходимого угла поворота Y щтанги и представляющее собой множительно-делительную мостовую схему, состоящую из двух установленных на направляющей и перпендикулярной линейках линейных потенциометров, сопротивления которых соответственно эквиваленты текущим координатам Y п X точек косого сечения, отрабатывающего линейного потенциометра с сопротивлением, эквивалентным igy, движок которого укреплен на поворотной штанге, линейного потенциометра с сопротивлением,эквивалентным определенному диапазону постоянных величин т и сопротивления, равного выбранной масштабной единице сопротивления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ НАГЛЯДНЫХ ИЗОБРАЖЕНИЙОБЪЕКТА | 1967 |
|
SU195639A1 |
| Чертежный прибор для преобразования косого сечения винтовой поверхности в ее нормальное сечение | 1973 |
|
SU462745A1 |
| ЧЕРТЕЖНЫЙ ПРИБОР | 1972 |
|
SU330989A1 |
| Прибор для построения панорамной перспективы | 1974 |
|
SU517520A1 |
| ЧЕРТЕЖНЫЙ ПРИБОР | 1969 |
|
SU238168A1 |
| ПРИБОР ДЛЯ ПОСТРОЕНИЯ НАГЛЯДНЫХ ИЗОБРАЖЕНИЙОБЪЕКТА | 1968 |
|
SU211795A1 |
| 5И5.П!->&ОТЕКЛ | 1973 |
|
SU382523A1 |
| Чертежный прибор | 1967 |
|
SU679431A1 |
| Прибор для построения стереопанорам | 1981 |
|
SU977220A1 |
| Чертежный прибор | 1972 |
|
SU452525A1 |
17
тт -гт/т
а 6- а 3 5 7
fff 22 23
18 2 в Риг /
