Известны индуктивные датчики для контроля положения подвижных шахтных объектов, содержащие магнитопровод с сигнальными обмотками и обмотками онорного напряжения и возбуждения, выпрямительные мосты, конденсаторы и исполнительное устройство. Эти датчики используются при сравнительно малых воздушных зазорах между датчиком и контролируемым объектом и могут быть сбиты или повреждены контролируемым объектом. В то же время увеличение зазора вызывает снижение чувствительности датчика.
Предлагаемый датчик для контроля положения подвижных шахтных объектов отличается от известных тем, что его магнитопровод выполнен четырехполюсным с обш,им средним стержнем, на котором расположены обш;ая обмотка возбуждения и две обмотки опорного напряжения, к каждой из которьх подключена пара соединенных встречно сигнальных обмоток, расположенных на соответствующих взаимно продолжающихся полюсах магнитопровода. При этом каждая обмотка связана через конденсатор с выпрямительным мостом. Выпрямительные мосты образуют с сигнальными обмотками и обмотками опорного напряжения двойную мостовую фазочувствительную схему, выход которой через полупроводниковый диод соединен с исполнительным устройством. Такое выполнение датчика позволяет упростить его и повысить чувствительность.
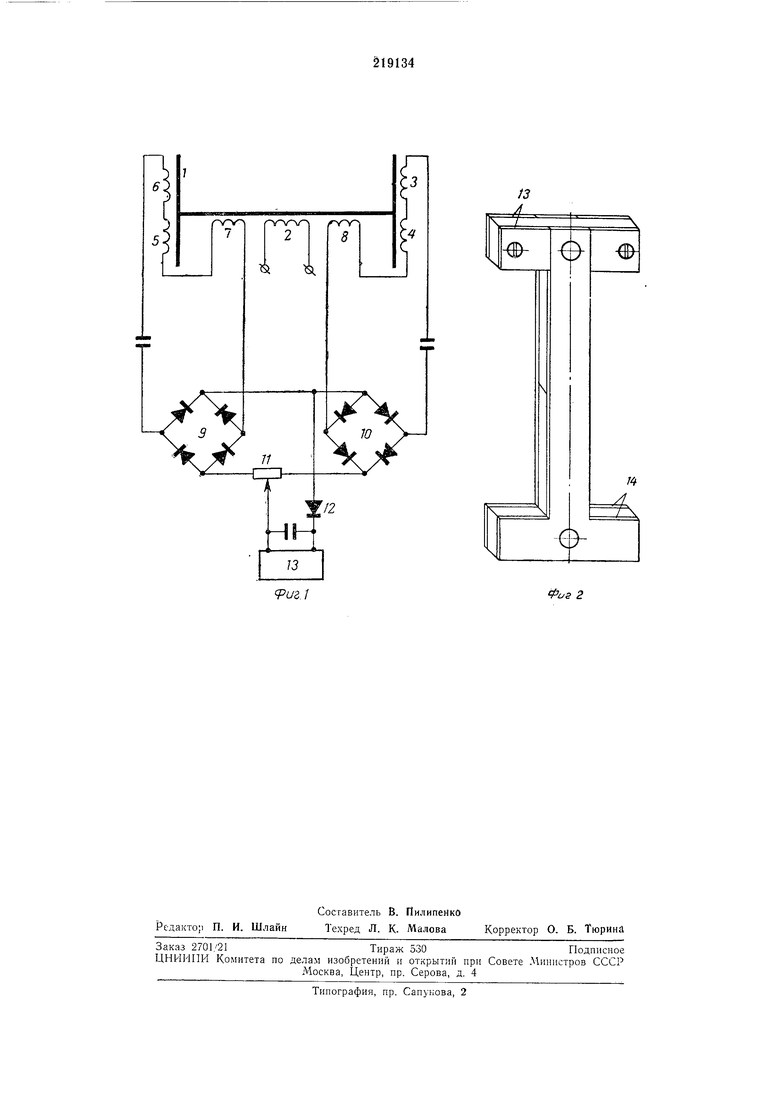
На фиг. 1 представлена принципиальна; электрическая схема датчика; на фиг. 2 - датчик, общий вид.
Пндуктивный датчик положения состоит из магнитопровода , обмотки возбуждения 2, сигнальных обмоток 3-6, обмоток 7 и 8 опорного нанряжепия, выпрямительных мостов 9 и W, сопротивления // точной установки «нуля, диода 12 и исполнительного устройства 13.
Магнитонровод датчика состоит из двух Т-образных половин, скрепленных накладками 14, и выполнен из ферромагнитного материала.
Обмотка возбуждения питается от сети переменного тока. Обмотки 3-6 имеют одинаковое число витков. Обмотки 7 и 8 также имеют одинаковое число витков.
Обмотки датчика соединены между собой следующим образом. Сигнальные обмотки 3, и 5, 6 соединены попарно, последовательно и встречно, т. е. так, что в каждый момент времени наводимые в них э. д. с. направлены встречно при отсутствии воздействия контролируемого объекта на датчик. Обмотки 3, 4 VI 7 соединены менаду собой так, что 3. д. с., наводимая в обмотке 7 и результирующая э. д. с. обмоток 3 и 4 ( при воздействии на датчик ферромагнитной массы, например, со стороны обмоток 3 к 4 имеют одинаковые направления в каждый момент времени, т. е. складываются. Обмотки 5, 6 v( 8 соединены между собой так, что э. д. с., наводимая в обмотке 8 и результирующая э. д. с. обмоток 5 и 6 при воздействии ферромагнитной массы, например, со стороны обмоток 3 и 5, в каждый момент времени направлены встречно. Сигнальные обмотки 3-6 и обмотки 7 и 8 опорного напряжения вместе с вьшрямительнымн мостами 9 к 10 образуют двойную мостовую фазочувствительную схему. Выпрямительные мосты включены между собой таким образом, что в каждый момент времени (при отсутствии воздействия ферромагнитной массы) в устройстве 13, являющемся нагрузкой, протекают равные, но противоположно направленные токи /7 и is, создаваемые, соответственно, э. д. с. обмоток 7 н 8. Поэтому при отсутствии воздействия ферромагнитной массы на датчик сигнал, подаваемый в нагрузку, равен нулю. Вследствие неточности изготовления обмоток датчика на нагрузку может быть нрдан некоторый незначительный сигнал. Чтобы избежать этого явления, т. е. уравнять токи г-,- и /8, на выходе датчика включено регулировочное сопротивление 11 точной установки «нуля. При воздействии на датчик ферромагнитной массы, например, со стороны обмоток 3 и 5, ток в последних увеличивается и на выходе каждой нары обмоток получаются разностные э.д.с. и бз-бе. При этом ток в нагрузке становится равным (/7-А(з-4) - (is - А гб-б) - /7 - А /3-4 - /8 - - Д /5-6 : 2 А г, где /7,8-токи, обуслОВленные э.д. с. .обмоток 7 и 8; А/3-4 и Д/5-6 -токи, обусловленные разностными э.д.с. соответственно обмоток 3, 4 и 5, 6; э. д. с. А еЗ-4 - 63-64 и А 5-6 65 - Так как / f/s и JA : |А /s-6 общий ток в нагрузке равен -2Аг. При воздействии на датчик ферромагнитной массы со стороны обмоток 4 II 6 общий ток в нагрузке равен (/7 + А/4-6) -(/8-А/з-б) -f2А/. Величина тока А/, обусловленная величиной разностной э.д.с. на паре обмоток 3, 4 или 5,6, зависит от расстояния между ферро.магнитной масой и датчиком. Знак при Л/ свидетельствует о зависимости направления выходного тока от того, с какой стороны воздействует на датчик ферромагнитная масса контролируемого объекта. Чтобы датчик реагировал на ферромагнитную массу только со стороны контролируемого объекта, на выходе фазочувствительной схемы включен диод 12, который пропускает сигнал полярности соответствующей стороне датчика, на которую нормально воздействует ферромагнитная масса. В связи с тем, что мйгнитопровод датчика выполнен в виде двух Т-образных датчиков с общей обмоткой возбуждения на средних стержнях, благодаря чему обеспечивается высокочувствительная по отношению к внещни.м ферромагнитным массам симметричная дифференциальная схема распределения магнитного потока, а диод 12 пропускает лишь сигналы необходимой полярности, датчик не реагирует на симметричные ферромагнитные массы ни с одной из няти сторон, кроме шестой рабочей. С рабочей стороны датчик реагирует на любые ферромагнитные массы. Предмет изобретен и я Р1ндуктивный датчик для контроля положений подвижных шахтных объектов, содержащий магнитопровод с сигнальными обмотками, обмотками опорного напряжения и возбуждения, выпрямительные мосты, конденсаторы и исполнительное устройство, отличающийся тем, что, с целью упрощения датчика и повышения чувствительности, его магнитопровод выполнен четырехполюспым с общим средним стержнем, на котором расноложены общая обмотка возбуждения и две обмотки опорного напряжения, к каждой из которых подключена пара соединенных встречно сигнальных обмоток, расположенных на соответствующих взаимно продолжающихся полюсах магнитопровода и связанных каждая через конденсатор с выпрямительным мостом, причем выпрямительные мосты с сигнальными обмоткамн и обмотками опорного напряжения образуют двойную мостовую фазочувствительную схему, выход которой через полупроводниковый диод соединен с исполнительнынз устройством.
(V
L
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНЦЕВОЙ ВЫКЛЮЧАТЕЛЬ | 1971 |
|
SU293301A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 1973 |
|
SU378719A1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1973 |
|
SU408154A1 |
| УСТРОЙСТВО для КОНТРОЛЯ ТЕМПЕРАТУРЫ МАСЛА В ТУРБОМУФТАХ | 1970 |
|
SU284361A1 |
| УСТРОЙСТВО для СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1968 |
|
SU217756A1 |
| Электромагнитный датчик положения перемещающегося объекта | 1978 |
|
SU672630A1 |
| АМПЛИТУДНЫЙ ДИСКРИМИНАТОР | 1971 |
|
SU294254A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ УПРАВЛЯЕМОГОРЕАКТОРА | 1969 |
|
SU252735A1 |
| БЕСКОНТАКТНОЕ РЕЛЕ | 1971 |
|
SU308515A1 |
| УСТРОЙСТВО ДОПУСКОВОГО КОНТРОЛЯ НАПРЯЖЕНИЯ | 1968 |
|
SU209583A1 |
А
