В настоящее время для определения направления Н угла падения магнитных и электропроводных рудных нодсечений в буровых скважи:нах используется токовый каротаж с тремя электродами, расположенными в плоскости, перпендикулярной оси скважины.
Предлагаемый способ, основанный на измерении магнитной восприимчивости и проводимости горных пород по электрическому сигналу датчика, бесконтактный и поэтому может быть применен на всех рудных месторождениях, руды которых обладают высокой магнитной IB ос нр ИИ мч ив остью или хорошей электропроводностью.
Отличие способа заключается в том, что датчику магнитной восприимчивости сообщают винтовое движение так, чтобы эффективный объем породы, действующий на датчик перемещался по винтовой линии относительно оси скважины. Это позволяет яенрерывео определять магнитную восприимчивость последовательно, в каждой точке поверхности стенки скважины. В результате получается развертка скважины по величине матнитной восприимчивости, -что дает возможность определять параметры рудного подсечения.
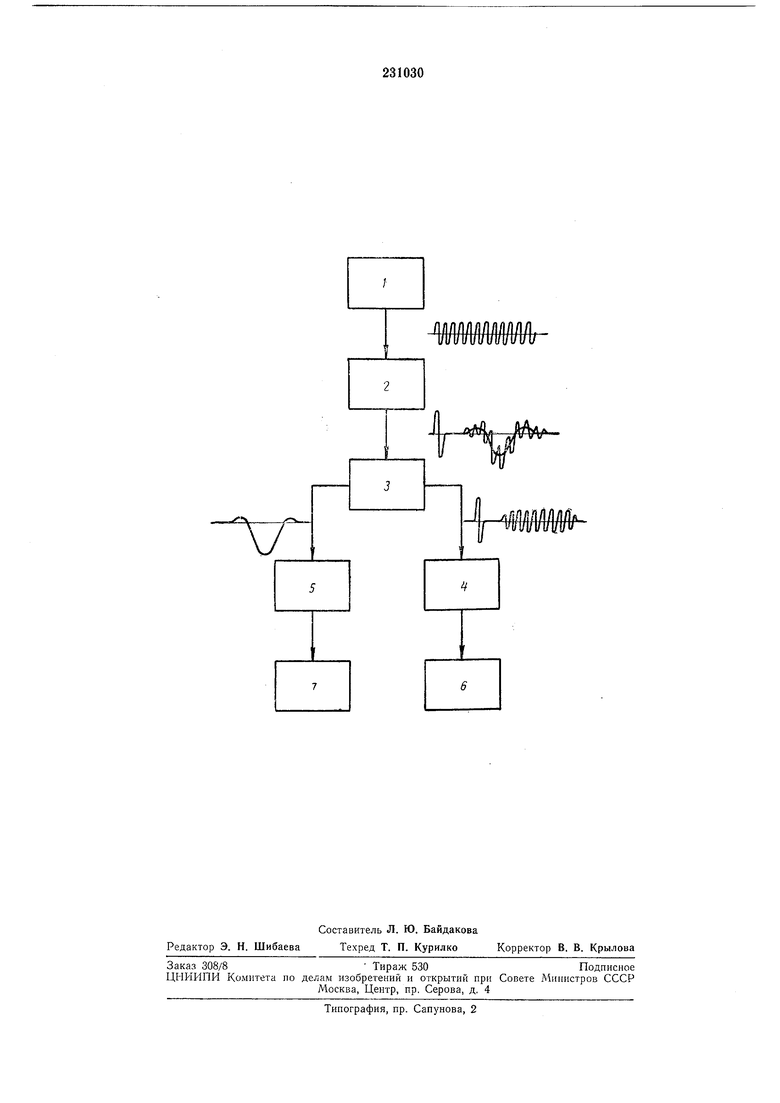
с вращающимся датчиком; 3 - устройство, разделяющее электрический сигнал датчика на / и HI, где - магнитная восприимчивость, HI - градиент составляющей магнитного поля, перпендикулярной оси скважины; 4 - преобразователь электрических сигналов в световые X - канала; 5 - преобразователь электрических сигналов в световые Н - канала; 6, 7 - фоторегистраторы.
Установка для измерения состоит из наземвой аппаратуры и каротажного снаряда. Измерения производятся непрерывно при подъеме снаряда. Датчик представляет собой маленькую индукционную катущку с П-образным
ферромагнитным сердечником, который своей средней частью крепится на оси микроэлектродвигателя, совпадающей с осью каротажного снаряда, а полюсами обращен к стенке скважины. Обмотка датчика включена в схему измерительного моста 2, питаемого напряжением генератора L
Способ заключается в следующем. Датчик вращается микроэлектродвигателем в плоскости, перпендикулярной оси скважины, и одноBpeMeHHO медленно перемещается вдоль этой оси при подъеме каротажного снаряда. Полюса его, проходя вблизи стенок скважины, описывают винтовую линию с очень малым шагом, в результате чего датчик вырабатывает некоторого характеризует физические овойстза пород (х или сг) iB каждой точке стенки скважины. Нсли поверхность .вскрытого рудного тела перпендикулярна оси скважииы, сигнал на выходе измерительного моста имеет постоянную амплитуду. Если же поверхность рудиого тела «е перпендикулярна оси скважины, то .в месте встречи скважины с этим телом сигнал лоявляется тогда, когда датчи;к лроходит возле участка стенки, представленной рудой. Одновременно в катушке датчика наводится Э.Д.С., пропорциОНальная градиенту составляющей магнитного поля Н, перлендикулярйой оси скважины, HI, которая характеризует намагниченность стенок скважины. Частота этой 5 Э.Д.С. равна частоте .вращения датчика и значительно ниже частоты - сигнала, определяемой частотой звукового генератора 1. Поэтому сигналы, характеризующие х и HI могут быть разделены разделительным устройством 3. Внутри снаряда, на уровне полюсов датчика, укреплена ферромагнитная метка начала отсчета, лри прохождении возле которой датчик вырабатывает импульс 1метки. Система, включающая метку, ориентируется в ллоскости на- 25 клона скважины при помощи груза - эксцентрика. Таким образом, вращающийся датчик (Вырабатывает сигналы, характеризующие величины X и Hi, и имлульсы метки. С выхода устройства 3 электрические сигналы в виде зо вмлульсов напрял ения, локазанных на чертеже, подаются на два различных канала H//I. С ломощью устройств 4 и 5 эти импульсы преобразуются в световые сигналы переменной яркости (в зависимости от амплитуды имлульсов з напряжения), которые фиксируются на кинолентах фоторегистратарами & и 7. Отрицательные импульсы //1-канала до преобразования в световьге сигналы должны быть лредварительно промодулированы, для чего пользуется -напряжение генератора /, тогда области положительной намагниченности на киноленте Я1-канала отметятся сплошными, а области отрицательной намагниченности- прерывистыми темными линиями. Па киноленте -канала темными линиями отметятся участки пород или руд с большой величиной х, по сравнению с вмещающими породами, точно также будет выглядеть осциллограм.ма лри измерении проводимости а. Темными точкамиjo с левой стороны кинолент отмечаются импульсы меток. В результате на кинолентах получается магнитная (или электрическая) развертка скважины и фиксируется намагниченность стенок скважины. Полученные на осциллограмме -канала величины АЛ (угол между проекциями нулевой 5 20 55 ли-нии и линии падения поверхности рудного тела на ллоскость, лерпендикулярную оси скважины) и А (расстояние по оси скважины между верхней и нижней точками встречи скважины с поверхностью рудного тела), позволяют найти угол ладения рудного тела б и азимут линии падения относительно азимута нулевой линии Af. 4 - arctg °. Sim созАд созя + созя sin-f 8 arcsin (cossc coscp - sina . созД) sinf). где a - угол между векторами падения, налравленным по линии ладения рудного тела и осью OZ, направленной вниз по оси скважины, Ф - зенитный угол скважины. Азимутальная привязка нулевой линии, лежащей в ллоскости наклона скважины, и определение зенитного угла скважины, значение которого входит в формулы для АГ и б, осуществляется посредством стандартной инклинометрии. Таким образом, для азимута и угла ладения рудного подсечения имеются окончательные формулы А-АО + АГ АО + d slnarctg - h +arctgsinarctg- созЛ, cos + cosarctg;- h Sz arcsin(cosarctg -coscp-sinarctgs vcosA,i sin), где Ло и ф определяются лосредством инклинометрии, d - диаметр скважины, а величины /г ,и Лп берут с осциллограммы хПредмет изобретения Способ определения направления и угла падения магнитных и электропроводных рудных подсечений в буровых скважинах, основанный ;яа измерении магнитной восприимчивости и лроводимости горных пород ло электрическому сигналу датчика магнитной восприимчивости, отличающийся тем, что, с щелью получения данных как ло линии в плоскости лолеречного сечеиия стенми окважины, так и по образующей стенки скважины, датчику магнитной восприимчивости сообщают винтовое движение так, чтобы эффективный объем породы, действующий на датчик, перемещался ло винтовой ликии относительно оси скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения угла наклона плоскости контакта намагниченных тел | 1973 |
|
SU697944A1 |
| РЕНТГЕНО-РАДИОМЕТРИЧЕСКИЙ АНАЛИЗАТОР ДЛЯ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ТЯЖЕЛЫХ ЭЛЕМЕНТОВВ РУДАХ | 1972 |
|
SU329830A1 |
| Комплексный магнитометр-инклинометр для исследований скважин различного назначения | 2024 |
|
RU2831753C1 |
| Способ разведки месторождений | 1978 |
|
SU765495A1 |
| Каротажный способ поисков магнитных залежей, находящихся в стороне от скважины или ниже ее забоя | 1959 |
|
SU125310A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ВОЛЬФРАМА И МОЛИБДЕНА | 2018 |
|
RU2705750C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ КАРОТАЖА В РУДНЫХ СКВАЖИНАХ | 2010 |
|
RU2456643C2 |
| Способ ориентирования веера скважин | 1974 |
|
SU744226A1 |
| Устройство для магнитного каротажа | 1983 |
|
SU1130819A1 |
| СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА СКВАЖИН | 1969 |
|
SU234283A1 |