Изобретение относится к системам для фотографического копирования чертежа объекта на фотопластину для изготовления на пластике двумерной группы идентичных чертежей, каждый из которых аналогичен чертежу объекта, но существенно уменьшен в масштабе, при точно определенном расстоянии между центрами чертежей в двух измерениях.
Копировальные системы этого типа применяются при .производстве гравировальных матриц, используемых для серийного производства микромодулей. Технология производства масок включает многократное последовательное гравирование по полупроводниковой подлолже, которая затем разрезается на мел.кие идентичные части.
При каждо.м гравировании используется .матрица, причем положение матриц должно быть точно определено.
Известны копировальные микрофотографические ска.мьи, содержащие .механизм, перемещающий основание с помощью микрометрических винтов для смещения фотопластинки относительно чертежа объекта по двум направлениям в плоскости, нор мальной к оптической оси камеры.
Вращающийся диск со щелямц, связанный с фотоэлемента.ми, используется для включения лампы-вспышки в любом положении пластины при ее перемещении в двух направлениях.
Чтобы получить точность порядка 1 мк в системе этого типа, механическая точность
при различных перемещениях пластины и шаг ведущего винта должны составлять доли микрона. Такая высокая точность может быть достигнута только в начальный период работы .механизма. Износ поверхностей ниток ведущего винта в особенности ограничивает срок службы известных копировальных скамей, и это значительно увеличивает производственную стоимость гравировальных и, следовательно, микромодулей.
Предлагаемый фотографический аппарат обеспечивает точность положения механических частей независимо от износа поверхностей Н1ГГОК ведущих винтов.
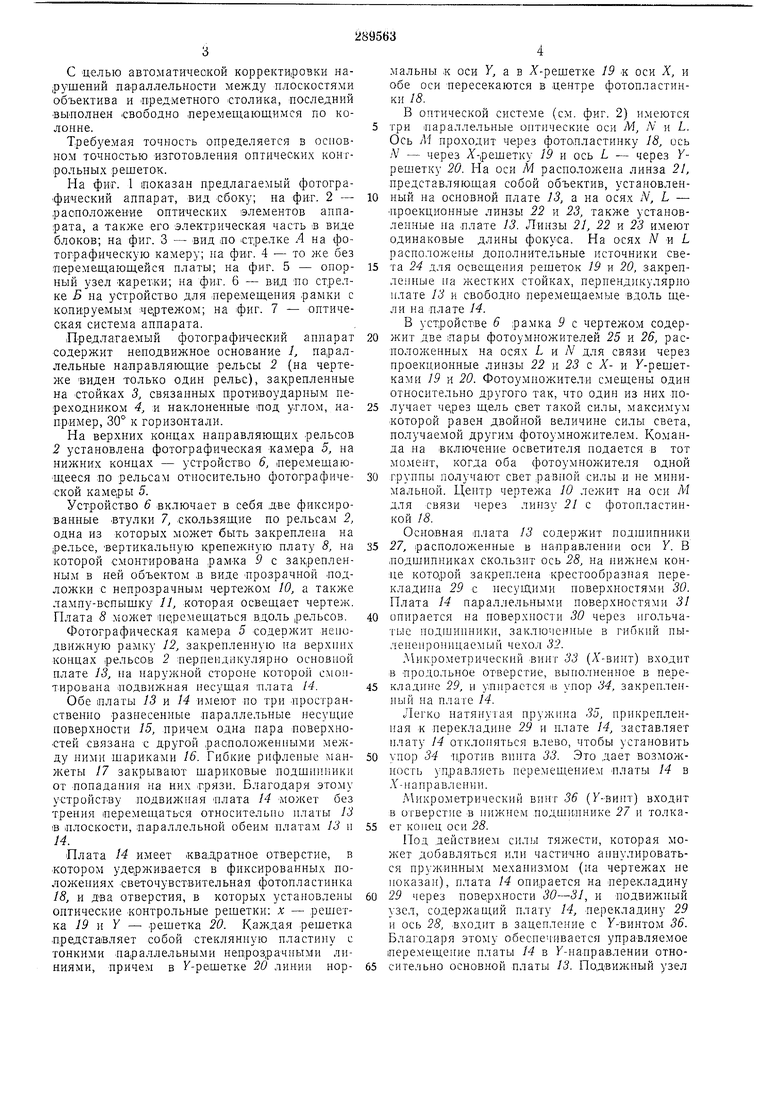
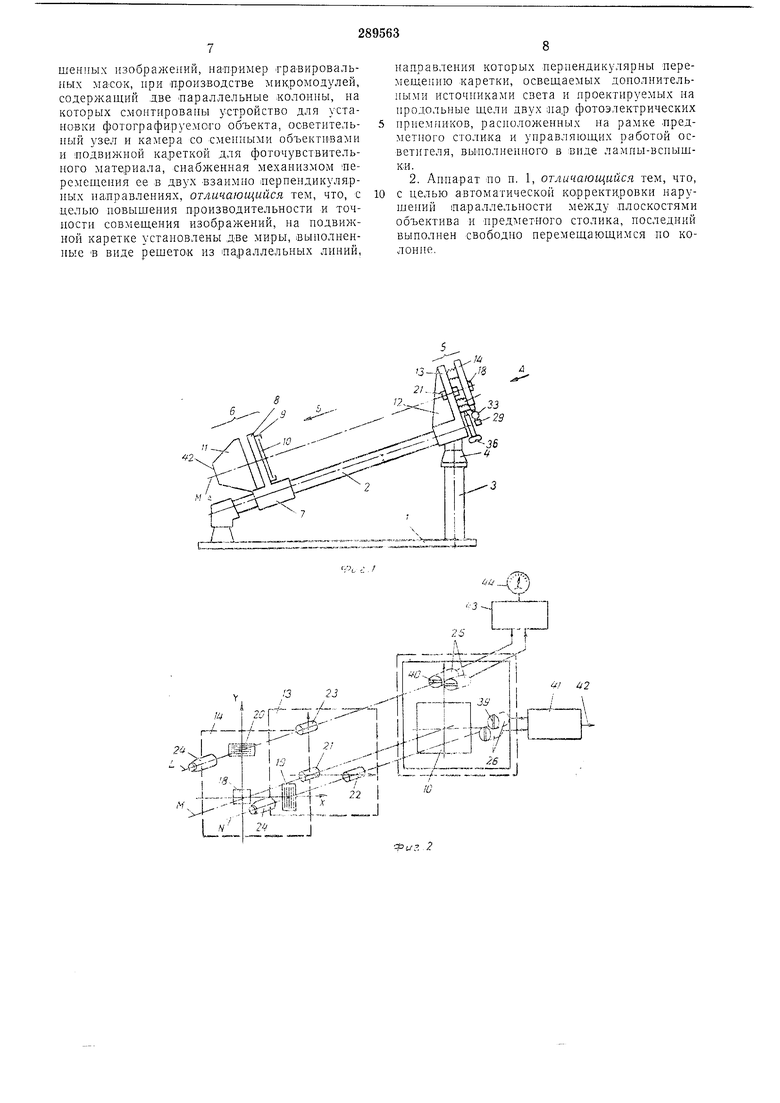
Для этого в аннарате на нодвижной каретке установлены две миры, выполненные в виде решегок из параллельных линий, направление которых педпендикулярно перемещению каретки. Решетки освещаются донолнительными источниками света и проектируются на продольные щели двух пар фотоэлектрических приемников, расположенных на ра.мке предметного столика и управляющих работой осветителя, выполненного в виде импульсной с целью автоматической корректировки нарушений параллельности между плоскостями объектива и предметного столика, последний выполнен свободно леремещающимся по колонне. Требуемая точность определяется в основном точностью изготовления оптических конгрольных решеток. На фиг. 1 (показан предлагаемый фотографический аппарат, вид сбоку; на фиг. 2 - расположение оптических элементов аппарата, а также его электрическая часть в виде блоков; на фиг. 3 - вид по стрелке Л на фотографическую камеру; на фиг. 4 - то же без перемещ.ающейся платы; на фиг. 5 - опорный узел каретки; на фиг. 6 - впд по стрелке Б на устройство для перемеш.ения рамки с копируемым чертежом; на фиг. 7 - оптическая система аппарата. Предлагаемый фотографический аппарат содержит неподвижное основание 1, параллельные направляк)1Ш,ие рельсы 2 (на чертеже виден только один рельс), закрепленные на стойках 3, связанных противоударным переходником 4, и наклоненные оод углом, например, 30° к горизонтали. На верхних концах направляющих рельсов 2 установлена фотографическая камера 5, на нижних концах - устройство 6, перемещающееся по рельсам относительно фотографической камеры 5. Устройство 6 включает в себя две фиксированные втулки 7, скользящие по рельсам 2, одна из которых может быть закреплена на рельсе, вертикальную крепежную плату 8, на которой смонтирована раМКа 9 с закрепленным в ней объектом в виде прозрачной подложки с непрозрачным чертежом 10, а также лампу-вспыщку 11, которая освещает чертеж. Плата 8 может шеремеи аться вдоль рельсов. Фотографическая камера 5 содержит неподвижную рамку 12, закрепленную на верхних концах рельсов 2 перпендикулярно основпой плате 13, на наружной стороне которой смонтирована подвижная несущая плата 14. Обе платы 13 и 14 имеют по три пространственно разнесенные параллельные несущие поверхности 15, причем одна пара поверхностей связана с другой расположенными между ними щариками 16. Гибкие рифленые манжеты 17 закрывают щариковые подщппиики от попадания на них грязи. Благодаря этому устройству подвижная ткчата 14 может без трения перемещаться относительна платы 13 В плоскости, параллельной обеим платам 13 и 14. Плата 14 имеет квадратное отверстие, в котором удерживается в фиксированных положениях светочувствительная фотопластинка 18, и два отверстия, в которых установлены оптические контрольные решетки: х - рещетка 19 1 У - рещетка 20. Каждая рещетка представляет собой стеклянную пластину с тонкими параллельными непрозрачными линиями, причем в К-ращетке 20 линии нормальны к оси У, а в J-рещетке 19 « оси X, и обе оси пересекаются в центре фотопластинки /5. В оптической системе (см. фиг. 2) имеются три параллельные оптические оси М, Л и L. Ось Л1 проходит через фотопластинку 18, ось Л - через Js -рещетку 19 и ось L - через Yрещетку 20. На оси М расположена линза 21, представляющая собой объектив, установленный на основной плате 13, а на осях V, L - проекционные линзы 22 и 23, также установленные на плате 13. Линзы 21, 22 и 23 имеют одинаковые длины фокуса. На осях N и L расположены дополнительные источники света 24 для освещения решеток 19 и 20, закрепленные на жестких стойках, перпендикулярно плате 13 и свободно перемен,аемые вдоль щели на плате 14. В устройстве 6 рамка 9 с чертежом содержит две пары фотоумножителей 25 и 26, расположенных на ОСях L и Л для связи через проекционные линзы 22 и 23 с Х- и К-решетками 19 и 20. Фотоумножители смещены один относительно другого так, что один из них получает через щель свет такой силы, максимум которой равен двойной величине силы света, получаемой другим фотоумножителем. Команда на включение осветителя нодается в тот мо.мент, когда оба фотоумножителя одной группы получают свет равной силы и не минимальной. Центр чертежа 10 лежит на оси М для связи через линзу 21 с фотопластинкой 18. Основная плата 13 содержит подшипники 27, расположенные в на правлении оси Y. В подшипниках скользит ось 28, на нижнем конце которой закреплена крестообразная перекладина 29 с песущими поверхностями 30. Плата 14 параллельными поверхностями 31 опирается на поверхности 30 через пгольчатыс ПОД1ПИПНИКИ, заключенные в гибкий пыленепроницаемый чехол .1. Микрометрический винт 33 (А-винт) входит в продольное отверстие, выполненное в перекладине 29, н упирается в упор 34, закрепленный на плате 14. Легко натянутая пружина 35, прикреплен1 ая к перекладине 29 и плате 14, заставляет плату 14 отклоняться влево, чтобы установить vnop 34 против винта 33. Это дает возможность управляеть перемещением платы 14 в .-направлении. Микрометрический винт 36 (У-винт) входит в отверстие в нижнем подшипнике 27 и толкает копец оси 28. Под действием силы тяжести, которая может добавляться или частично аннулироваться пружинным механизмом (на чертежах не показан), плата 14 опирается на перекладину 29 через поверхности 30-31, и подвижный узел, содержаниш плату 14, перекладину 29 и ось 28, входит в зацепление с У-винтом 36. Благодаря этО;му обеспечивается управляемое еремещение платы 14 в К-паправлении отноможет быть закреплен в выбранном положении в F-направлении устройством для блокировки 37, связанным с подшипником 27, например, пкев.матическими толкателями, соединенными друг с другом.
При работе чертеж 10, полученный на прозрачной пластине, например, фотографи.рованием вставляют в рамку 9. Описываемый алпарат воспроизводит объект в сильно уменьшенном масштабе, например 1 : 100, нафотопластинке 18 как серию идентичных -скопированных чертежей, .расположенных на плоскости -при точно распределенной локализации вдоль осей X У.
Х-винт 33 вращается электрическим двигателем (на чертежах не показан) и медленно .перемешает плату М в выбранном направлении (направо или налево) вдоль оси X относительно основной платы 13. Как доказано на фиг. 7, линии Л-решетки 19 освещают источником света 24 и проектируют через линзы 22. В результате получают увеличенное изображение (в 100 раз) линий 38 в плоскости фотоумножителей 26. Так как /Y-решетка 19 движется с Платой 14 в направлении оси X, изображение линий 38 сдвигается в противоположном направлении, указанном стрелкой X, пересекая фотоумножители 26.
Каждый фотоумножитель имеет тонкую приемную щель 39 и 40, параллельную линиям 7-решеток, и, следовательно, каждый фотоумножитель получает минимум света в тот мо.мент, когда его щель пересекается изображением линий. Выходные сигналы с фотоэлементов фотоумножителя 26 подаются на точно сбалансированную Схему сравнения 41, генерирующую выходной сигнал на линию 42 в случае, .когда имеется предварительно заданное соотношение между уровнями освещенности каждого фотоумножителя 26. Сигнал по линии 42 подается на лампу-вспыщку //, которая .короткой вспышкой .света большой интенсивности освешает чертеж 10, а линза 2} формирует уменьшенное изображение чертежа 10 на определенной части пластинки 18, пересекающей в это мгновение оптическую ось линзы 21.
Во время .вращения Х-винта 33 плата 14 разномерно движется, н одинаково уменьшенные изображения чертежа 10 последовательно копируются при малом изменении положения .вдоль оси X.
Когда плата 14 достигает конечного положения вдоль оси X, срабатывает устройство для прекращения ее движения и возвращения ее в начальное положение с высокой скоростью, напри.мер реверсирующий переключатель, включаемый выступом на плате 14, который воздействует на двигатель, вращающий винт 33 в обратном наяравленин при увеличенном напряжении питания.
Когда плата 14 возвращается в первоначальное положение, ее перемещают вдоль оси У. С этой целью У-винт 36 вращается вручную или автоматически и поднимает узел.
состоящий из оси 28, перекладины 29 и платы 14. В этот момент У-рещетка 20 связывается с фотоумножителем 25 точно так же, как Л-рен1етка с фотоумножителем 26. Выходные сигналы с фотоумножителей 25 подаются на схему сравнения 43, которая устанавлнвает стрелку прибора 44 на нуль в тот момент, когда достигается необходнмое соотнощение освещенностей обоих фотоумножителей 25.
После этого устройство 37 блокирует подвижный узел в подши.пниках 27.
Затем вновь включается дв1:гатель, который вращает А-винт и двигает плату 14 вдоль оси X. В течение этого времени схема сравнения
41 периодически включает лампу-вспыщку // для воспроизБеде ня изобрал-;еннй чертенка 10 в определенных с небольщнми промежутками положениях вдоль оси А . После этого плата 14 с высокой скоростью вновь возвращается в первоначальное положение, затем У-впнт 36 перемещает .плату 14 на щаг в У-направленин, и так до тех нор, пока пе будет получен .полный комплект изображений. Конечный образец, полученный на фотопластпнке IS, .представляет собой прямоуголь)1ую матричного впда группу маленьких непрозрачных чертежей, полностью идентичных, уменьшенных по сравнению с образцом и готовых для производства матриц для микроэлектронной техники.
Наиболее удобный метод управления фотоэлсктрнчеоки контролируемой системы следующи. Схемы сравнения 41 и 43 пасграиваются, чтобы подавагь сигнал на выходную линию в тот момент, когда один из фотоэлементов соответствующей пары получает вдвое большее освещение, чем другой, т. е. в тот момент, когда одпн из двух фотоумножителей полностью освещается, а освещение другого
изменяется от максимального к минимальному. Точность, получаемая прн этом способе нере.мещения вдоль осей А н У оказывается
лучше чем 0,1 мк (или 1000 А).
Для регулировки рамки 9 объекта в направлении У в аппарате предусмотрен микрометрический винт 45, так как устройство для блокировки 37 иногда вызывает разрегулирование несушей платы 14 в направлении У. В результате регулирования винтом 45 чертеж
10 вместе с фотоумножителем 25 несколько сместится относительно изображения лпний У-решеткн 20.
Сл со;енпе фотоумножителя 26 не будет возмущать регулировку оси X, так как это смещение параллельно линиям Х-рещетки.
Несущая плата 14 может быть заменена жесткой группой, например четырехлинзовой, для одновременного формирования четырех .картинок на фотопластинке 18.
Угол наклона рельсов 2 к основанию 1 может изменяться от О до 90°С
Предмет изобретения I. Копировальный фотографический аппарат для получения группы идентичных уменьшенпых нзооражении, например гравировальных масок, при производстве микромодулей, содержащий две параллельные колонны, на которых смонтированы устройство для установки фотографируемого объекта, осветительный узел и камера со сменными объективами и подвижной кареткой для фоточувствительного материала, снабженная механиз.мом перемещения ее в двух взаимно лернендикулярных налравлениях, отличающийся тем, что, с целью новынтения нроизводительности и точности совмещения изображений, на нодвижной каретке установлены две миры, вынолненные в виде решето-к из параллельных лнний.
направления которых перпендикулярны перемещению каретки, освещаемых донолнительными источниками света и проектируемых на нродольные щелн двух aiap фотоэлектрических приемников, расположенных на рамке предметного столика и управляющих работой осветителя, выполненного в виде лампы-вснышки.
2. Аппарат по п. 1, отличающийся тем, что, с нелью автоматической корректировки нарушений параллельности между плоскостями объектива и предметного столика, последний выполнен свободно перемещающимся по колонне.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического измеренияуглОВыХ РАСпРЕдЕлЕНий СлЕдОВ чАСТиц | 1978 |
|
SU743424A1 |
| ОПТИЧЕСКИЙ ИНТЕРФЕРЕНЦИОННЫЙ РЕТИНОМЕТР | 2003 |
|
RU2253352C2 |
| Светопроекционный дальномер | 1983 |
|
SU1200121A1 |
| Устройство фокусировки фото-гРАфичЕСКОй КАМЕРы АСТРОНОМи-чЕСКОгО СпЕКТРОгРОфА | 1979 |
|
SU807194A1 |
| ПОЛЯРИЗАЦИОННОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1968 |
|
SU211824A1 |
| Сдвоенный каротажный фоторегистратор | 1960 |
|
SU135539A1 |
| Устройство для юстировки рентгеновского штатива | 1990 |
|
SU1804792A1 |
| Аппарат для передачи изображений неподвижных и движущихся предметов | 1923 |
|
SU405A1 |
| Микрофотометр | 1975 |
|
SU826201A1 |
| Устройство для обработки спектросенситограмм | 1982 |
|
SU1116328A1 |
3
,„|ДГЗ -.: .
U-- ...
Ь.
.
j;f тг| Т| ;;етеШ
LI ,: --ii il,-T- ж
т - :1
Д;Г v
- 7-. --Y (
,Й
.VS J
ртЛЛу
вс
fc---,/- , 1 -:-pi4 I ..1. 1
i - о
f I
гС--; J: -У
т Т&,
,.г.5
iS
Х
L
Ji
.fi
й- -г-гП
нЧг
