Изобретение относится -к способам центрирования катушки нодвижиой системы в кольцевом воздушном зазоре магнитной цсии.
В настояидее время центровка катушки иодвижных систем в зазоре осуществляется иутем перемеидения катушаси 1Вручную или с номош,ыо каки.-либо механических устройст1В. нриводимых в действие оиератором вручную. Ручная или механическая центровка занимает много времени, требует высокой квали(|)икации онератора и в то же время не гарантирует качества центровки, т. е. концентричности катушки в зазоре магннтной цепи, и одинакового расстояния от иоверхиости катушки до поверхности полюсных наконечников с обеих сторон катушки но всему периметру.
Цель изобретеиия - автоматизация нроцесса центрирования подвижных систем электроакустических .преобразователей динамического тииа и иовышеиие точности.
Для этого к катушке .подвижной системы, произвольно установленной в воздушном зазоре магнитной цепи, нодводится иеремепный тоК соот;ветствуюш,ей амплитуды и частоты для создания колебательного движения иоДвижиой систе.мы, а также постоянное напряжение соответствующей полярности и величины для удержания катушки в зазоре магнитной цеии. Возникающие пульсации
давления в объеме, ограниченном иодвижнои системой и полюсными иакоиечниками магнитной цеии, автоматически устанавливают катушку iB воздушном зазоре .магнитной цепи коицентрично этому зазору.
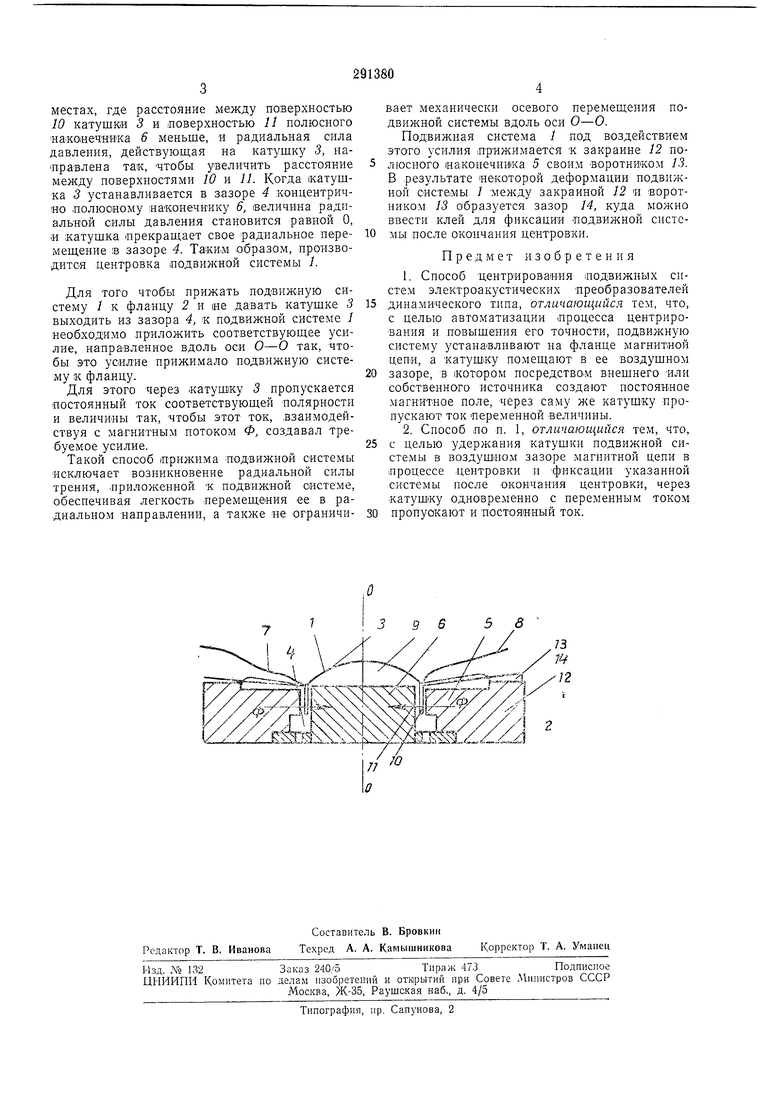
На чертеже представлено устройство, реализующее предлагаемый способ.
Подвижная система / устанавливается иа флаице 2 магнитной цеии так, чтобы катушка 3 вошла в воздушный зазор 4, образованный концентрически расиоложеииыми иолюсными наконечниками 5 и 6. К выводам 7 и 5 катушки 3 лодключают перемеиное нанряжение соответствующей амилитуды и частоты. Возникающий в катушке 3 переменный ток взаимодействует с магнитным потоком Ф, каким-либо образом создаваемым в зазоре 4 магиитной цепи и направленным раднальио по отношению к этому зазору. В результате такого взаимодействия подвижная система лриходит в колебательное движенне вдоль оси О-О. В результате такого движения в объеме 9 возникает акустическое давлеи е, которое через зазор между катушкой 3 и полюсным наконечииком 6 передается во внешнюю среду. Таким образом, зазор катушкой 3 и иолюсным иаконечником 6 превращается в звукопровод. Акустическое давление действует на иоверхность 10 катушки 3. Величина этого давления больше в тех
местах, где расстояние между поверхностью 10 катушки 3 и поверхностью 11 полюсного накоиечяика 6 меньше, и радиальная сила давления, действуюш;ая на катушку 5, наПравлена так, чтобы увеличить расстояние между иоверхностями 10 VL 11. Когда катушка 3 устанавливается в зазоре 4 концентричяо .полюсному наконечн-ику 6, величина радиальной силы давления становится равной О, и катушка прекраш ает свое радиальное перемеш,ение SB зазоре 4. Такил образом, ироизводится центровка подвижной системы /.
Для того чтобы прижать подвижную систему 1 к фланцу 2 и не давать катушке 3 выходить из зазора 4, к подвижной системе 1 необходимо приложить соответствующее усилие, направленное вдоль оси О-О так, чтобы это усилие прижимало подвижную систему к фланцу.
Для этого через «атушку 3 пропускается постоянный ток соответствующей полярности и величины так, чтобы этот ток, взаимодействуя с магнитным потоком Ф, создавал требуемое усилие.
Такой способ прижнма подвижной системы исключает возникновение радиальной силы трения, приложенной к подвижной системе, обеспечивая легкость перемещения ее в радиальном направлении, а также не ограничивает механически осевого перемещения подвижной системы вдоль оси О-О.
Подвилсная система / под воздействием этого усилия прижимается к закраине 12 полюсного наконечника 5 своим воротником 13. В результате некоторой деформации подвижной системы 1 между закраиной 12 и воротником 13 образуется зазор 14, куда можно ввести клей для фиксации подвижной системы после окончания центровки.
Предмет изобретения
1.Способ центрирования подвижных систем электроакустических преобразователей динамического типа, отличающийс.ч тем, что, с целью автоматизации процесса центрирования и повышения его точности, подвижную систему устанавливают на фланце магнитной цепи, а катушку помещают в ее воздущном зазоре, в котором посредством внешнего или собственного источника создают постоянное магнитное поле, через саму же катушку пропускают ток переменной величины.
2.Способ по п. 1, отличающийся тем, что, с целью удержания катушки подвижной системы в воздуш1ном зазоре магнитной цепи в процессе центровки и фиксации указанной системы после окончания центровки, через катушку одновременно с переменным током пропускают и постоянный ток.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный электромагнитный преобразователь | 1986 |
|
SU1601783A1 |
| ЭЛЕКТРОАКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2400017C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1966 |
|
SU183978A1 |
| Электродинамический вибратор | 1978 |
|
SU1041168A1 |
| Способ регулировки электромагнитной системы электроакустических преобразователей | 1958 |
|
SU129237A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1965 |
|
SU168031A1 |
| Электроакустический преобразователь Леонтьева А.А. | 1990 |
|
SU1778915A1 |
| Электрическая бесконтактная синхронная машина | 1973 |
|
SU543098A1 |
| Бесконтактная синхронная машина с аксиальным возбуждением | 1972 |
|
SU463199A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ С ПОЛЫМ РОТОРОМ | 1969 |
|
SU237993A1 |
3 9 G58
