Предлагаемый манипулятор к аппарату Бодо имеет целью предоставление возможности работать на этом аппарате каждому знакомому только с работой на пишущей машине без знания азбуки Морзе.
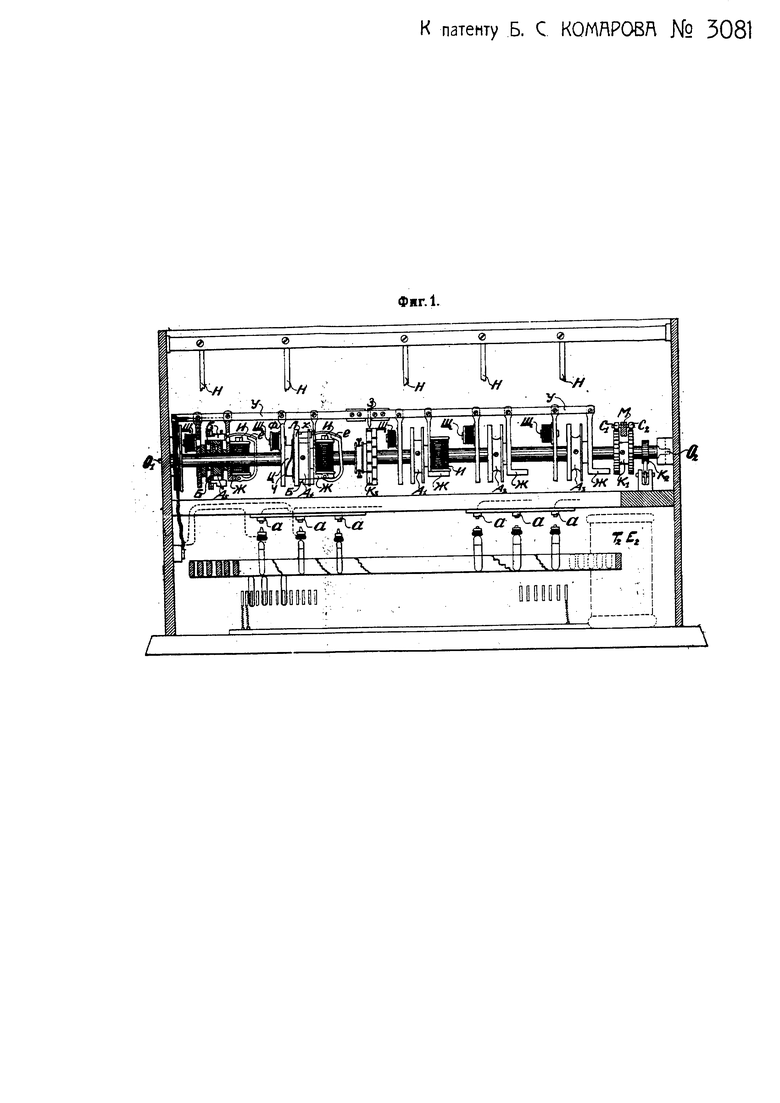
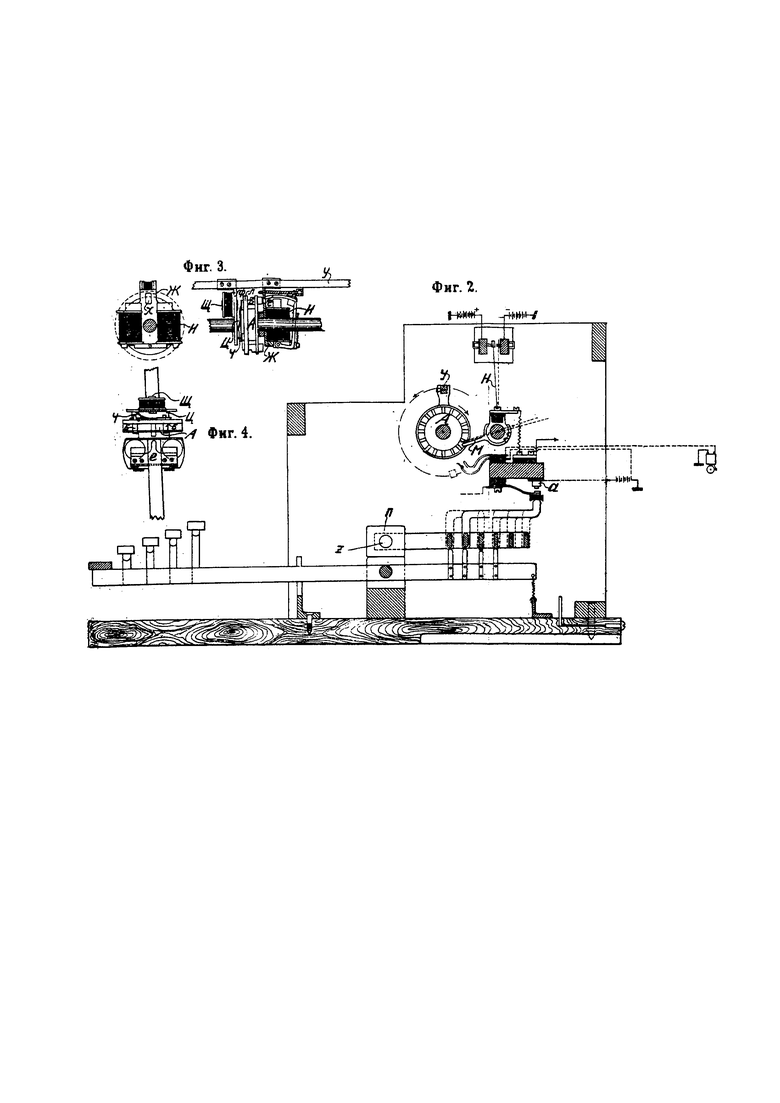
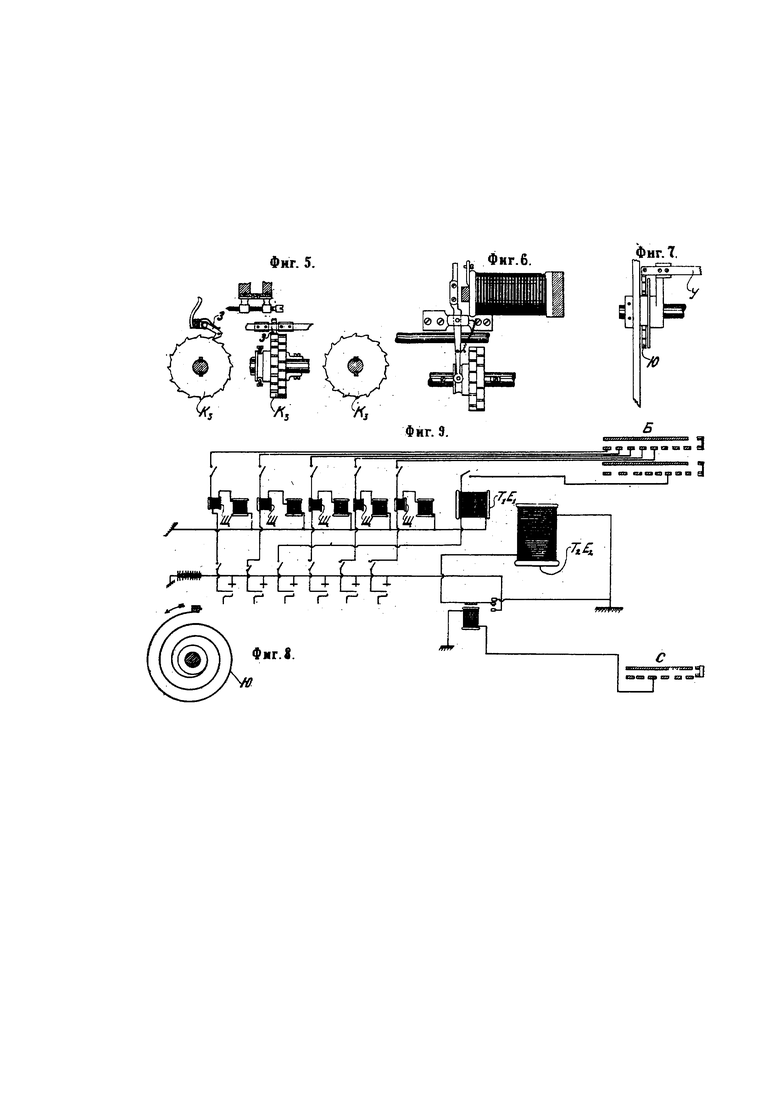
На фиг. 1 схематически изображен предлагаемый манипулятор в продольном разрезе вертикальной плоскостью; на фиг. 2 - поперечный разрез манипулятора через клавиатуру; на фиг. 3-8 изображены детали устройства и на фиг. 9 изображена схема электрического включения манипулятора.
На горизонтальной оси О1, O2 насажены соединенные с ней наглухо колеса А1, А2, А3, А4, A5. Эти колеса имеют по своей боковой поверхности прорезы (количество каковых на данном чертеже 16, но может быть сделано меньше или больше по желанию) (фиг. 1 и 2). В вырезы горизонтально вставлены контактные болтики Б в количестве, соответствующем числу вырезов. Контактные болтики свободно двигаются в прорезах вдоль своей оси и могут быть передвигаемы справа налево до упора утолщенной части болтика - из холостого положения в рабочее. На главной оси O1, O2 (фиг. 1) насажены, наглухо соединенные с ней, храповые колеса К1 и К2, из коих сдвоенное храповое колесо К1 имеет число зубцов равное числу болтиков колес А и соединено при помощи рычага М и собачек C1 и С2 с тактовым электромагнитом Т2, Е2 (соединение на чертеже не показано). Тактовый электромагнит Т2, Е2 может быть или непосредственно включен в цепь нормального распределителя Бодо, или же через электромагнит нормальной клавиатуры, замыкающей уже затем цепь электромагнита Т2, Е2 (согласно схеме включения фиг. 9).
При каждом замыкании тактового электромагнита он поворачивает главную ось О1, О2 на один зубец храповика К, при этом колеса А1, А2, А3, А4, А5 также поворачиваются по направлению часовой стрелки на один тактовый болтик. Если при этом контактный болтик будет выдвинут на рабочее положение и выдвинутая его головка окажется над отводящим рычагом М (фиг. 2) контактной пружины Н, то при своем дальнейшем движении означенная головка надавит на этот рычаг, последний передвинет контактную пружину к левому контакту, соединит распределитель с положительной батареей и даст на линию посылку положительного тока (см. фиг. 2). Отводящий рычаг М останется нажатым (положение, указанное на фиг. 2) до нового такта, при чем если следующий болтик будет также выдвинут, то он снова нажмет отводящий рычаг и даст посылку вновь положительного тока, а если же болтик находится в холостом положении и не выдвинут на боковую поверхность колеса, то нажатие отводящего рычага М не произойдет и контактная пружина Н вернется к правому контакту и даст посылку отрицательного тока.
Для того, чтобы с одной стороны произвести выдвижение болтика, а с другой закрепить их в выдвинутом положении, устроена так называемая каретка, состоящая из пяти комплектов электромагнитов И и захватывающих плоскостей, соединенных вместе штангой У (фиг. 1 и 3), и из храпового колеса Кз, скрепленного с главной осью шпонкой, но могущего передвигаться" вдоль главной оси в ту и другую сторону, при чем храповой собачкой З каретка (фиг. 1 и 5) соединяется с главной осью и при движении последней по часовой стрелке следует за ней. Ударные электромагниты Н каретки установлены на Г-образной пластинке Ж с отверстием для пропуска главной оси и соединенной наглухо с штангой каретки У. На якоре электромагнита имеется ударник е (фиг. 1 и 3). При прохождении тока через электромагниты якоря их притягиваются и ударник через отверстие х стойки Ж ударяет по соответствующему болтику и передвигает его справа налево в рабочее положение (фиг. 3).
Зубцы храпового колеса, связанного с кареткой, расположены, по отношению к главной оси, таким образом, что всегда в спокойном положении ударник е находится против болтика. Захватывающая плоскость Л (фиг. 3) имеет дискообразную форму с отверстием для главной оси и воротцами, шириной немного больше болтика. Эта плоскость насажена на боковую поверхность барабана Ц, связанного наглухо пластинкой Ф с штангой каретки (фиг. 1 и 3). Захватывающая плоскость Л выступает над краем барабана Ц, перекрывает крючкообразные концы контактных болтиков и не дает им возможности передвинуться в своих прорезах. Лишь против ударника электромагнитов, как было сказано, имеется прорез, через который болтик может быть выдвинут за плоскость на рабочее положение. Электромагниты соединяются или с ключами клавиатуры, или с распределителем Бодо и, получая посылку тока, соответствующую комбинации букв Бодо, передвигают на рабочее положение соответствующую комбинацию контактных болтиков. Эти болтики, двигаясь от удара якоря электромагнитов, проходя своими крючками через воротца захватывающей плоскости, останавливаются против электромагнита Щ. Этот маленький электромагнит имеет своей целью, с одной стороны, помогать набору комбинаций, притягивая движущийся болтик, а с другой стороны, удерживать болтик в выдвинутом положении, пока болтик при движении каретки не зацепится за захватывающую плоскость своим крючком. Когда набранная комбинация болтиков будет выдвинута на рабочее положение, происходит посылка тока в электромагнит T1, E1 (храпового колеса К3), который притянет свой якорь, передвигающий храповое колесо К3 справа налево, и освободит собачку 3, а следовательно, и всю каретку от сцепления с главной осью. Освобожденная каретка под действием спиральной пружины Ю (фиг. 8) начнет двигаться в обратном направлении главной оси, т.-е. против часовой стрелки. Движение будет происходить до тех пор, пока храповичок не встретит на своем пути зубец правой половины храпового колеса К3, которое, как видно из фиг. 5, состоит из двух половин с зубцами, расположенными в шахматном порядке. Как только посылка тока в электромагнит прекратится под влиянием пружины якоря электромагнита, храповое колесо вернется в свое первоначальное положение и опять освободит каретку, которая вновь передвинется против главной оси до упора в зубец левой половины храпового колеса, т.-е., другими словами, за одну посылку тока в электромагнит Т1, Е1 каретка повернется против вращения часовой стрелки на один зубец левой половиной храпового колеса, а так как число зубцов соответствует числу контактных болтиков, то вся каретка опять встанет против прорезов колес А1, А2, А3, А4, А5 для нового набора комбинации болтиков.
Таким образом, при каждой серии посылок тактов в электромагниты каретки и электромагнит Т1, Е1 происходит набор новой комбинации болтиков и каретка, передвигаясь против часовой стрелки, становится против последующих неиспользованных болтиков для нового их набора. Набранные же болтики, как было сказано, захватываются своими крючками за захватывающую плоскость и, оставаясь с ее левой стороны, не могут уже вернуться обратно в свое холостое положение. Давая последующие серии токов, набирают новые комбинации болтиков, при чем каретка все время двигается против часовой стрелки. Это движение и набор комбинаций болтиков, как видно, не зависит от того, находится ли главная ось в покое или же движется в свою очередь. Набранная комбинация контактных болтиков при вращении главной оси встречает на своем пути отклоняющие рычаги М контактных пружин Н, надавливает их и дает на линию комбинацию посылок положительных и отрицательных токов, соответствующую передаваемой букве.
Так как главная ось при каждой посылке тока в тактовый электромагнит Т2, Е2 поворачивается на один зубец храпового колеса по часовой стрелке, а каретка при посылке тока в электромагнит T1, E1 вращается против таковой стрелки на один зубец храпового колеса, то при одинаковой частоте посылок тока в оба электромагнита, каретка как бы остается неподвижной по отношению к корпусу прибора. Если же частота посылок тока будет больше для тактового электромагнита Т2, Е2, то каретка по отношению к корпусу прибора, будет двигаться в общем по часовой стрелке, а в обратном случае, против часовой стрелки.
Так как при относительном движении каретки по часовой стрелке каретка могла бы наскочить на контактные пружины, то имеется упорный винт, который задержит раньше это движение каретки и, затормозив ее, остановит весь прибор до нового набора буквы, при котором каретка вновь передвинется против часовой стрелки. При относительном же движении против часовой стрелки, т.-е. при наборе комбинаций букв скорее подачи тактов в электромагнит Т2, Е2, в конечном итоге она опять могла бы при своем движении наехать на контактные пружины, но уже с другой стороны, а потому имеется ключ, который каретка замкнет и этим даст сигнал (при помощи электрического звонка) телеграфисту задержать несколько работу, чтобы дать возможность каретке продвинуться вместе с главной осью по часовой стрелке.
Из изложенного видно, что набор букв совершенно не зависит от такта, передача же набранных букв совершается в такт и не зависит от последующего набора. новых комбинаций. Набранные контактные болтики, по передаче комбинации токов контактным пружинам, встречают, на своем пути отогнутую часть Ч захватывающей пластины (фиг. 1 и 4), каковая и возвращает, при движении каретки, болтики из рабочего положения в холостое.
При работе прибором, как манипулятором, посылки токов в электромагнит каретки и в электромагнит Т1, Е1 производятся телеграфистом при помощи клавиатуры и шести П-образных рычагов.
Как видно из чертежа (фиг. 2), на правой части клавиши насажены стерженьки-пальцы. Расположение пальцев и число их соответствует пяти клавишам нормальной клавиатуры Бодо плюс один лишний для замыкания электромагнита Т1, E1. Таким образом, каждая клавиша имеет свою комбинацию пальцев, числом от двух до пяти соответствующую букве, изображенной на клавише.
При нажатии клавиши пальцы ее поднимают лежащие поперек клавишам, имеющие форму буквы П рычаги (фиг. 2). Число П-образных рычагов равняется шести (для управления 5-ти электромагнитов каретки и одного электромагнита Т1, E1). Они насажены на ось Z концентрически друг по отношению к другу. Каждый П-образный рычаг, в свою очередь, имеет по одному пальцу, который, при поднятии рычага, надавливает на ключ а и замыкает соответствующий электромагнит каретки или электромагнит Т1, E1. При нажатии клавиши происходит набор комбинаций контактных болтиков, которые, при вращении главной оси, посылают соответствующую комбинацию токов на линию. При этом работа передающего телеграфиста совершенно не связана с передачей буквы распределителем Бодо; при наборе более быстром, чем передача знаков, о положении каретки работающий будет извещен звонком и должен будет переждать несколько мгновений для продвижения каретки. Передача же набранных комбинаций будет продолжаться совершенно равномерно в такт, пока все набранные буквы не будут переданы и прибор не остановится.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для накопления телеграфных сигналов | 1938 |
|
SU55666A1 |
| СКОРОДЕЙСТВУЮЩИЙ МНОГОКРАТНЫЙ АСИНХРОННЫЙ ТЕЛЕГРАФНЫЙ АППАРАТ | 1923 |
|
SU3372A1 |
| Приспособление к телеграфному аппарату Бодо для печатания строками | 1926 |
|
SU7983A1 |
| КЛАВИАТУРНЫЙ ПОЛУАВТОМАТИЧЕСКИЙ ПЕРЕДАТЧИК | 1922 |
|
SU3073A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ КЛАВИШЕЙ НАБОРНОЙ МАШИНЫ | 1935 |
|
SU53324A1 |
| БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ | 1921 |
|
SU7177A1 |
| Способ телеграфирования и буквопечатающий телеграфный аппарат для его осуществления | 1930 |
|
SU33188A1 |
| Устройство для одновременного набора несколькими наборочно-строкоотливными машинами | 1930 |
|
SU37107A1 |
| ЭЛЕКТРИЧЕСКАЯ ПИШУЩАЯ МАШИНА | 1924 |
|
SU3838A1 |
| АСИНХРОННЫЙ АВТОМАТИЧЕСКИЙ БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ | 1923 |
|
SU3560A1 |
Автоматический манипулятор-трансляция к аппарату Бодо, характеризующийся совокупным применением: а) системы колес А1, А2, A3, A4, А5 (фиг. 1, 2), насаженных на общую ось О1, О2 и снабженных по окружности прорезами, в которые пропущены болтики Б, при чем на ту же ось насажены храповые колеса К1 и К2, из коих первое, сдвоенного вида, имеет число зубьев равное числу болтиков и связано посредством собачек С1 и С2 и рычага М с якорем тактового электромагнита Т2, E2; б) каретки, движимой пружиной Ю (фиг. 7, 8) и состоящей из храпового колеса К3, насаженного на главную ось О1, O2 посредством шпонки, и пяти ударных электромагнитов H (фиг. 1, 4, 5), установленных на Г-образной пластинке Ж, соединенной наглухо с штангой У (фиг. 1, 3), при чем якоря ударных электромагнитов Н снабжены ударниками е, действующими на болтики Б соответствующего колеса А; в) системы электромагнитов Щ (фиг. 1, 3), связанных с барабанами Ц, скрепленными с захватывающими плоскостями Л и связанными пластинками Ф со штангою У каретки, полюсы каковых электромагнитов действуют на болтики Б, удерживая их в выдвинутом положении; г) системы П-образных рычагов (фиг. 2). насаженных на ось Z и системы клавиш К, снабженных пальцами, действующими на П-образные рычаги с одним пальцем на каждом из них, который надавливает на ключ а и замыкает цепь соответствующего электромагнита.
