Изобретение относится к автоматизации виброударных механизмов.
Известны датчики момента начала удара, включающие инерционную массу, являющуюся подвижным контактом, электромагнитную систему подвеса этой массы, неподвижные контакты и устройство для формирования выходного сигнала.
Однако эти датчики не обеспечивают надежной работы в условиях воздействия значительных ударных ускорений и вибраций.
Целью изобретения является обеспечение надежного контактирования рабочих поверхностей контактов и быстрого успокоения инерционной массы при срабатывании датчика.
Это достигается тем, что к подвилсному и одному из неподвижных контактов датчика через резистор подключен источник постоянного тока, а параллельно этому резистору через емкость включена одна из обмоток электромагнитной системы подвеса.
Сущность изобретения поясняется чертежом.
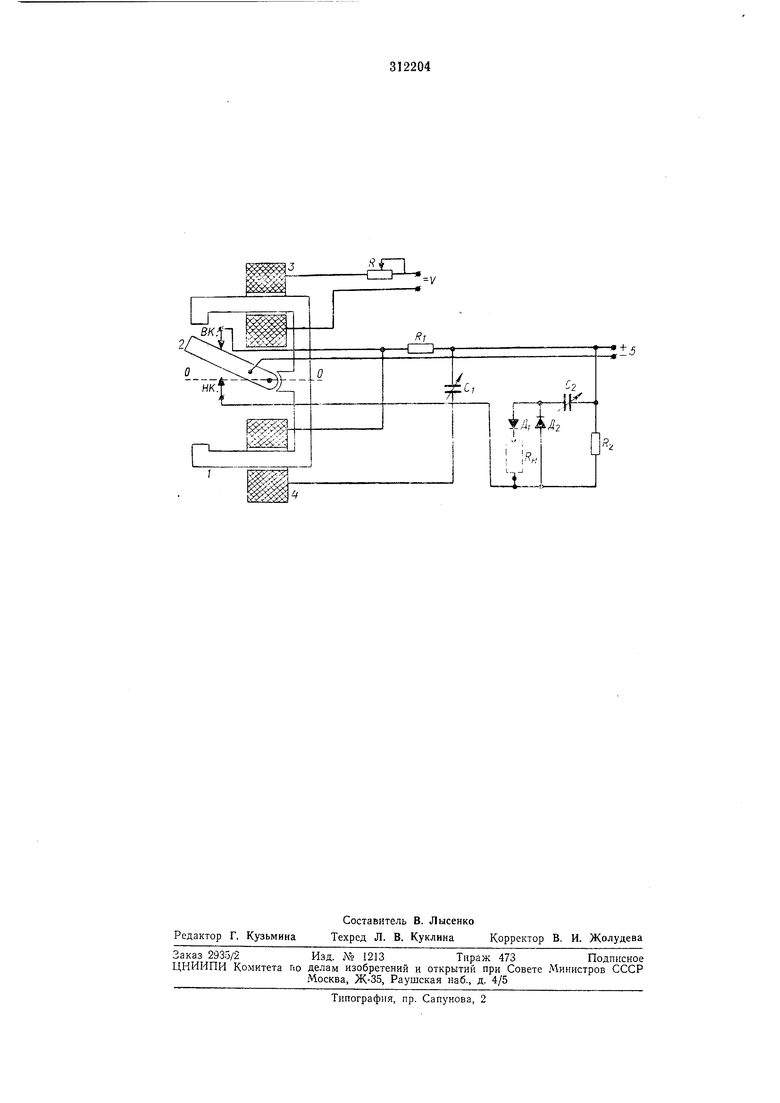
Датчик момента начала удара включает постоянный магнит 1, инерционную массу, являющуюся подвижным контактом 2, управляющие обмотки и 4, верхний ВК. и нижний НК контакты, резисторы Ri и R2, источник питания 5, емкости Ci и €2, диоды DI и DZ.
Параллельно резистору Ri через емкость Ci включена обмотка 4 электромагнита.
Работает датчик следующим образом.
Датчик устанавливается на корпусе машипы так, чтобы его нейтраль О-О была перпендикулярна направлению движения ударной части.
В исходном состоянии инерционная масса замкнута с контактом ВК, к которому он прижимается под действием результирующей силы притяжения, создаваемой магнитным потоком.
В момент удара рабочего органа виброударного механизма инерционная масса т, оторвется от контакта ВК, если
или ,
где а - ускорение корпуса мащины (а вместе с тем и инерционного элемента) при ударе;
F - результирующая сила притяжения инерционной массы к контакту ВК;
/о - расстояние от оси вращения до центра тяжести инерционной массы;
/я - длина инерционной массы от оси вращения до середины полюса.
силой, создаваемой магнитным потоком управления. Следовательно, при использовании управляющих обмоток 3 и 4 можно дистанционно изменять (при необходимости) чувствительность датчика момента удара и устанавливать строго заданный порог срабатывания, обеспечивая соответствующую силу притяжения инерционной массы подачей в обмотку управления 3 тока, величина и полярность которого соответствуют тарировочным данным.
11ри уменьшении действующих на инерционную массу ускорений до величины, меньшей заданного значения, происходит возврат этого элемента в исходное положение (замыкание контакта ЛЛ). Для облегчения возврата инерционной массы в исходное положение контакт //Д может устанавливаться выше нейтрали О-U, т. е. инерционная масса настраивается с преобладанием к контакту ЬК.. Наличие магнитного подвеса улучшает демпфирование колебательной системы датчика.
Катушка 4 электромагнита подключена параллельно резистору Ki через емкость Ci, что обеспечивает затухание переходных процессов в датчике (в промежутке между ударными воздействиями), сокращает время перелета инерционной массы (от верхнего контакта /( до замыкания с нижним контактом НК, что приводит к уменьшению запаздывания при срабатывании) снижает дребезги контактов и обеспечивает надежное контактирование рабочих поверхностей контактов при срабатывании датчика.
В исходном положении, когда инерционная масса прижата к верхнему контакту ВК, ток протекает между положительным и отрицательным полюсами источника питания, связанные между собой через ненодвижный контакт ВК, подвижный контакт 2 и резистор Ri. При этом конденсатор Ci заряжен.
При отрыве инерционной массы от контакта ВК. происходит разряд конденсатора через обмотку 4 электромагнитов и резистор RI. Обмотка подключена так, что в этом случае по ней проходит ток, который индуктирует магнитный поток, создающий в свою очередь силу, направленную в сторону нижнего контакта НК, т. е. направленную против силы притяжения инерционного элемента к верхнему контакту ВК.
Эта сила, действующая в течение времени разряда конденсатора (при соответствующих величинах силы тока разряда Ci и превосходящая силу притяжения /зад по величине, помогает инерционной массе преодолевать силу притяжения к верхнему контакту ВК, чем ускоряет перелет инерционной массы в нижнее положение и позволяет удерживать его некоторое время в замкнутом состоянии с нижним контактом Я/С. Такое прижатие инерционной массы к НК на период существования максимальных (часто многопиковых) ускорений во время ударно-вибрационного воздействия позволяет избегать повторных касаний инерционной массы контакта ПК при срабатывании датчика, т. е. исключается возможный дребезг.
По мере разряда Ci ток в обмотке 4 уменьшается, а следовательно, уменьшается и величина Fy. Когда становится /y /зад, инерционная масса датчика вновь притягивается к верхнему контакту ВК, т. е. возвращается в исходное положение. В момент замыкания с контактом ВК начинается заряд конденсатора Сь Протекающий при этом по обмоткам 4 ток (в противоположном направлении по сравнению с направлением движения тока при срабатывании датчика индуктирует силу Fy , совпадающую по направлению с . Эта сила, существующая в течение времени заряда конденсатора Ci, позволяет исключать возможный дребезг и быстро успокоить инерциониую массу у контакта fi/(.
Для формирования выходного сигнала требуемой длительности нагрузка (выход датчика) с одной стороны подсоединяется к контакту НК, а с противоположной - через диОД Ml и конденсатор Cz к тому полюсу источника 5 постоянного тока, который связан с контактом ВК. Второй полюс источника питания 5 подключен к подвижному контакту 2, поэтому в исходном состоянии цепь разомкнута и конденсатор Сг разряжен. При замыкании инерционной массы с контактом Я/С цепь замыкается, и через нагрузку R и диод Дх, пропускающий ток в этом направлении, проходит пикообразный импульс, заряжающий
конденсатор С2. Длительность этого импульса может регулироваться изменением емкости переменного конденсатора Cz.
С целью подготовки емкости Сг для формирования следующего импульса параллельно ей включен резистор Rz через диод Дг, установленный таким образом, что дает возможность пропускать ток разряда конденсатора Cz при разрыве цепи «подвижный контакт-НК, минуя нагрузку RB.
Вход нагрузки соединен с точкой .
Предмет изобретения
Датчик момента начала удара, включающий инерционную массу, являющуюся подвижным контактом, электромагнитную систему
подвеса этой массы, неподвижные контакты, устройство для формирования выходного сигнала, отличающийся тем, что, с целью обеспечения надежного контактирования рабочих поверхностей контактов и быстрого успокоения инерционной массы при срабатывании датчика, к подвижному и одному из неподвижных контактов через резистор подключен источник постоянного тока, а параллельно этому резистору через емкость включена одна из
-ffiX.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство коммутации | 1982 |
|
SU1050113A1 |
| Устройство для электроискрового легирования | 1991 |
|
SU1794605A1 |
| Устройство для исключения влияния дребезга контакта | 1985 |
|
SU1309283A1 |
| УСТРОЙСТВО для СВАРКИ | 1970 |
|
SU274261A1 |
| Устройство для контроля наличия напряжения источника питания | 1978 |
|
SU720365A1 |
| Вакуумный коммутационный аппарат | 1980 |
|
SU930414A1 |
| Устройство для регистрации @ временных интервалов | 1981 |
|
SU1022109A1 |
| Устройство для разделения компонентов картофельного вороха | 1985 |
|
SU1358818A1 |
| Способ отбраковки электромагнитных реле | 1991 |
|
SU1775745A1 |
| ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ МОДУЛЬНЫЙ СЕРИИ "TEL" | 1992 |
|
RU2020631C1 |