Предлагаемое изобретение отйосится к области радиотехники, а именно, к технике магнитной залиси, и может быть и-опользовано в апиаратах точной мапнитной залиси, в .которых необходим .контроль работы системы автоматического регулирования (САР) положения магнитного .носителя и измерения искажений временного масштаба.
Известны системы автоматического регулирования положения магнитного носителя, содержащие головку воспроизведения, усилитель, фазовый дискриминатор, устройство управления, блок опорной частоты, блок контроля и ведущий электродвигатель.
Основным Недостатком таких устройств является их относительно большая инерционность, оп.ределяемая наличием .интегрирующих каскадов и стрелочного при-бора, что не позволяет .измерить пиковое значение искажений временного ма-сщтаба и уменьшает -быстродействие и точность намерений яри непериодических процессах.
Предл.агаемая система автоматического регулирования Позволяет увеличить быстродействие и точность измерения такового значения искажений временного масштаба. Это достигается за счет выбора зоны контроля, равной по длительности или немного большей рабочей зоны системы автоматического регул.ироваиия, и индикацией совпадения отрицательных фронтов .контрольного и кратного ему по частоте о.порного сигналов. Для достижения этого .первый (ВХОД блока контроля соединен с ВЫХОДОМ усилителя, а второй - с одним из выходов блока опорной частоты, второй вход которого .подключе.н к другому входу фазового дис1крим.инатора. К,роме того, блок контроля содержсит блок индикации, 1преобразо.ватель частоты, диффере.нцирующие целочки, диоды
и элемент «И, о.дин 1вхо.д которого через диод соединен с выходом первой диффереПцирующей цепочки, второй - через диод и вторую дифференцирующую цепочч у с выходом преобразователя ч.астоты, а выход элемента «И
подключен ко .входу бло.ка индикации, причем
входы первой дифференцирующей цепочки и
преобразователя подключены соот1ветственно
к первому и второму входам блока 1ко.нтроля.
Предлагаемое устройство позволяет «обозначить с .помощью делителя (или умножителя) с переменным коэффициентом деления (умножения) .рабочую зону системы автоматического регул.ирова.Ния с точностью, определяемой а.бсолютным значением и ст.абильностью частоты опорного генератора и коэффициентом деления делителя (коэффициентом ум.ножения умножителя) частоты. В связи с этим точность измерения, в основном, определяется апор.ным генератором и может быгь
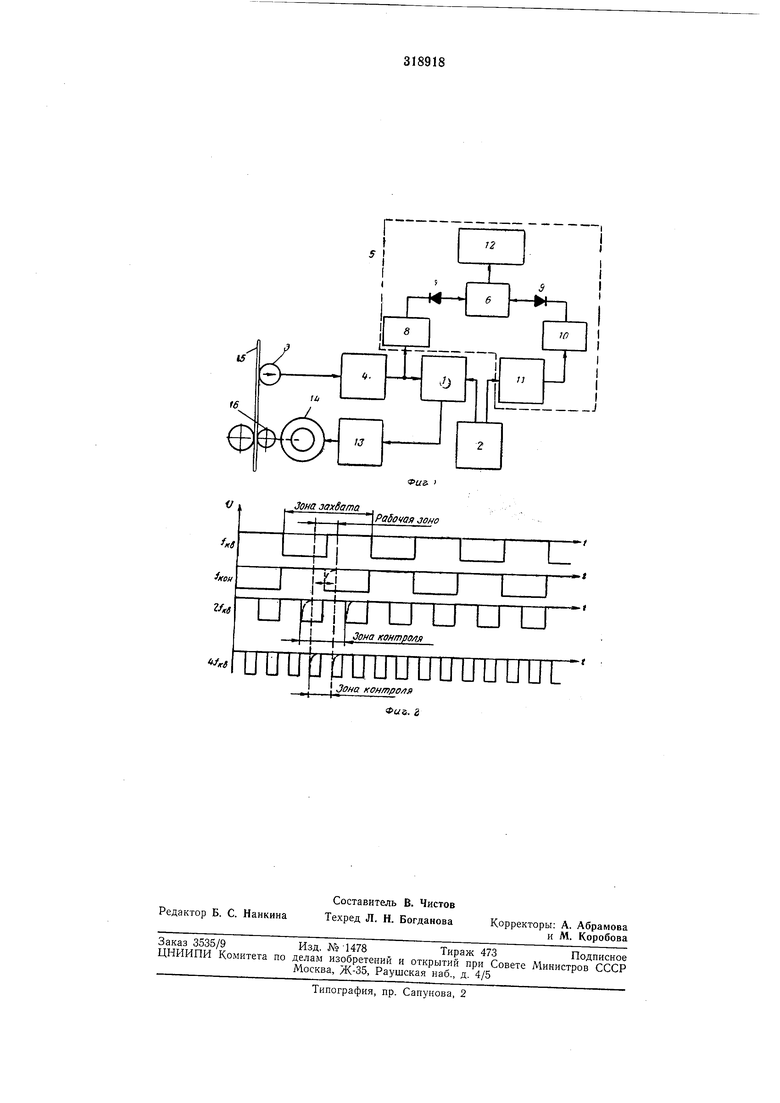
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 приведены диаграммы, поясняющие принцип работы устройства.
Предлагаемое устройство состоит из фазовото днскриминатора 1, соединенного одним входом с блоком 2 опорной частоты, а другим входом - с головкой 3 Воспроизведения через усилитель 4 во.апроиаведения контрольного сигнала; бложа контроля 5, включающего в себя логичеокую ячейку «И 6, подключенную одним входом через диод 7 и диффере.щирующую цепочку 8 ко входу фазового дискриминатора 1 со стороны контрольного сигнала и другим шходом через диод 9, дифференцирующую цепоч ку 10 и преобразователь частоты 11 с регулируемым коэффициентом лреобразования - КО второму ВХОДУ блока 2 опорной частоты, 1При этом выход ячейки «И 6 подключен iKo входу блока индикации 12; устройства управления 13, соединенного входом с фазовым диакрим.инатором /, а выходом - с ведущим электродвигателем 14; магнитного носителя 15 и ирижимных .роликов 16.
Устройство работает следующим образом.
При включении системы автоматического регулирования начинается .переходный процесс (система находится в зоне захвата), по око-нчании которого она входит в рабочую зону. В рабочей зоне в зависимости от величины возмущения на входе системы автоматического регулирования фронт контрольного ил1пульсного сигнала (фиг. 2, коп) может смещаться от1носительно опорного сигнала (ив). Величина относительного смещения двух фронтов и определяет величину искажений временного масщтаба. При выходе системы автоматического регулирования из рабочей зоны, что неиз бежно вызовет изменение фазового сдвига между контрольным и опорным сигналами («а этом основан принцип регулирования спстем 1C ф.азовой автоподстройкой) .-произойдет, следователыно, сОВпадение отрицательных фронтов контрольного и кратного по частоте олорному сигналов (/кои и 4/кв). Кратный ПО частоте опорному сигналу (/кв) может быть сформирован ,в блоке опорной частоты, при этом на вход делителя частоты, если он выбран В качестве преобразователя с Переменным коэффициентом деления (/(д), необходимо подать сигнал с частотой /г-/кв, где п - натуральный ряд чисел, чтобы отношение .iis
KI
позволяло получить необходимую по длительности зону Контроля.
Прохождение сигналов в устройстве осуществляется следующим образом.
Контрольный сигнал (кв) ic выхода усилителя 4 воспроизведения поступает на дифференцирующую цепочку 8, которая вырабатывает отрицательные и положительные имПульсы. Отрицательные импульсы Выделяются диодом 7 и поступают на вход ячейки 6. Аналогичным о-бразом проходит на второй
ВХОД ячейки 6 сигнал ic выхода блока 2 опорной частоты через преобразователь частоты //, дифференцирующую -цепочку 10 и диод 9. При совпадении отрицательных сигналов с обоих входо;в ячейки 6 на ее выходе вырабатывается импульсный сигнал, который поступает в |блок индикации 12.
Предмет изобретения
1.Система автоматического регулирова-ния положения магнитного -носителя, содержащая
головку воспроизведения, подключенную через усилитель к одному из входов фазового дискриминатора, выход которого через устройство управления соединен с обмоткой ведущего электродвигателя, блок опорной частоты и блок контроля, отличающаяся тем, что, с -целью повыш-ения быстродействия и точности, первый 1ВХОД блока контроля соединен -с выходом усилителя, а второй - с одним из
выходов блока опорпой частоты, второй выход которого подключен к другому входу фазового дискриминатора.
2.Система ПО п. 1, отличающаяся тем, что блок контроля содержит блок индикации, иреобразователь частоты, дифференцирующие цепочки, диоды и элемент «Н, -один вход которого через диод соединен с выходом первой дифферепцирующей -цепочки, второй - через диод и вторую дифференцирующую цепочку-
с выходом преобразователя частоты, а выход элемента «И подключен «о входу блока индикации, Причем -входы первой диффереицирующей цепочКП и преобразователя подключены соответственно К первому и второму IBXOдам блока контроля.
JOHO захвата
/
Работая joHo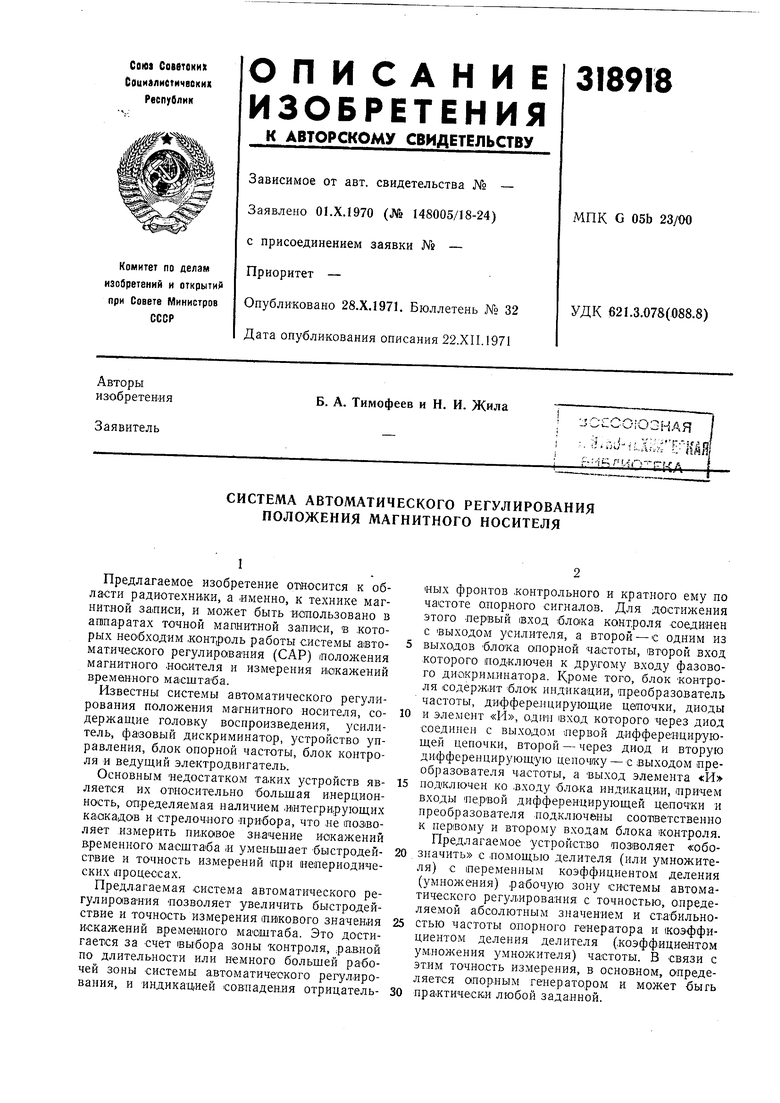

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования положения движущегося магнитного носителя | 1972 |
|
SU444237A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ МАГНИТНОЙ ЛЕНТЫ | 1971 |
|
SU318981A1 |
| Устройство для автоматического регулирования средней скорости движения магнитной ленты | 1972 |
|
SU495703A1 |
| Фотометрический дискриминатор | 1990 |
|
SU1778526A1 |
| Статический возбудитель электрических машин | 1991 |
|
SU1786618A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ СИГНАЛОВ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1997 |
|
RU2111504C1 |
| Устройство для контроля магнитофона | 1977 |
|
SU619962A1 |
| Следящий уровнемер электропроводных жидкостей | 1985 |
|
SU1326896A1 |
| Устройство для контроля и регулирования производительности | 1990 |
|
SU1791032A1 |
| Устройство для автоматической стабилизации скорости движения носителя | 1978 |
|
SU714485A1 |
ri
-h
UlTLf
-
Зона кон1про/1я
tlUUUUUUUUUL
Jona контра/те
