Изобретение отиоснтся к области измерительной техники, радиотехники и автоматики.
В настоящее время в измерительной технике и автоматике широко применяются электронные приборы, основанные на применении фазовой модуляции гармонических и импульсных сигпалов.
Недостатком известной схемы для усиления фазового сдвига гармоиическнх сигналов и преобразования их в имиульсное наиряжеине является ее сложность.
Целью изобретения является упроп1,енне схемы иутем совмен1е1Н1я в одном устройстве функций усилеиия фазового сдвига и нреобразоваиия гармонических колебаний в сигналы импульсиой формы.
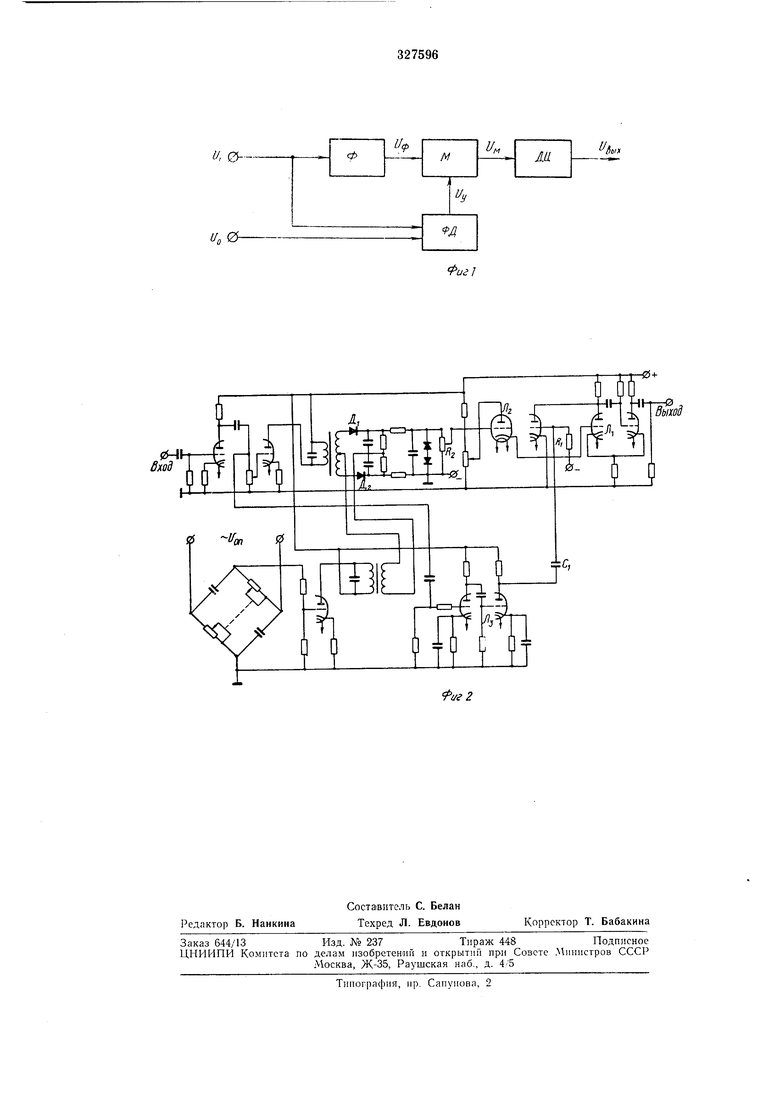
Блок-схема иредлагаемого иреобразователя фазовых сдвигов иоказана на фн1 1, где:
ФД - фазовый детектор, Ф - формирователь импульсов; М - управлямый ждущий мультивибратор; ДЦ - дифференцирующая цепочка; Uc - входной сигиал; Uo - опорный сигнал; U, L,, - выходные сигналы соответственно формирователя и управляемого мультивибратора; Uy - сигнал управления; пых - выходной сигнал импульсиой формы.
дифференцирующую цепочку. Формирователь, преобразуя входной сигиал в хронирующие импульсы, запускает ждущий мультивибратор. Выходной сигнал с мультивибратора диффереицнруется, н на выходе преобразователя получается импульсный сигнал с дополнительиой, по сравнению со входныл сигналом, фазовой модуляцией. Доиолиительная фазовая модуляция выходного сигнала обеспечивается за
счет мультивибратора и фазового детектора, включенного в цень оиорного нанряжеиия. Фазовый детектор, оиределяя величину и нанравление фазового сдвига входного сигнала U,относнтельно опорно1о снгнала f/,,, управляет
длительностью генерируемых мультивибратором имнульсов, т. е. велнчиной доиолнительной фазовой модуляцнн выходного снгнала. В общем случае величина доиолщггельной фазовой модуляции определяется крутизной характернстик фазового детектора ФД и мультивибратора М. С их увеличением растет величина дополнительной модуляции фазы выходного сигнала, вызванной действнем управляющего напряжения t/y, пропорционального величине
сдвига по фазе входного напряжения Uc относительно опорного напряжения UQ. Учитывая, что в настоящее время известны фазовые дискриминаторы с крутизной до 30 ejepad, можно в предлагаемом преобразователе получить
Принципиальная схема преобразователя приведена на фиг. 2. Управляемый мультивибратор построен на лампе Л1 по обычной схеме ждущего мультивибратора, длительность генерируемого импульса которого зависит от величины напряжения на управляющей сетке. Для повыщения крутизны мультивибратора в схему введена лампа Л. Мультивибратор запускается импульсами с формирователя, собранного на ламне Лз и дифференцирующей цепочке .
Фазовый детектор представляет собой дифференциальную схему на диодах Д и Д2, на выходе которого включен переменный резистор K.Z. Напряжение управления f/y с резистора Ri подается на сетку лампы //2 и управляет работой мультивибратора.
При равенстве нулю фазового сдвига напряжения сигнала t/c напряжение управления Уу равно пулю, при этом длительность генерируемого мультивибратором импульса минимальна. Изменение фазы входного напряжения вызывает появление нанряжения t/y на выходе фазового детектора, которое, изменяя потенциал сетки лампы Л, вызывает изменение длительности генерируемого мультивибратором импульса. При достаточной чувствительности мультивибратора происходит преобразование входного гармонического сигнала в сигнал импульсной формы с усилением фазового сдвига выходного сигнала, при этом за опорный импульс (по отнощению к которому отсчитывается фазовый сдвиг выходного сигнала) нринимаем выходной импульс преобразователя при нулевом фазовом сдвиге входного сигнала.
Усиление прямо пропорционально величине изменения нотенциала лампы Л-. В связи с этим переменный резистор можно назвать регулятором усиления фазового сдвига, так как от его положения зависит величина изменения потенциала на сетке входной ламны управляемого мультивибратора. Преобразователь усиливает фазовые сдвиги в пределах от О до 180°. Таким образом, предложенная схема включения известных элементов (ФД и М) по-новому решает задачу преобразования напряжения.
Предлагаемый преобразователь имеет следующне достоинства:
позволяет преобразовывать гармоническое напряжение в импульсное с усилением фазового сдвига;
преобразовывать как низкочастотные, так и высокочастотные сигналы на фиксированной частоте;
получать большие усиления фазовых сдвигов;
менять с помощью одного потенциометра усиление в широких нределах от нуля до максимума;
позволяет строить высокоточные системы измерения и регулирования с фазовой модуляцией, без применения дополнительных сложных усилителей фазовых сдвигов, с выходом на исполнительные устройства, с имнульсно-фазовым управлением типа управляемых кремниевых вентилей.
Данный преобразователь испытывался с фазовым детектором с крутизной порядка 10 , при этом было получено усиление фазовых сдвигов порядка 80.
Предмет изобретения
Преобразователь гармонического напряжения в импульсное, содержащий формирователь импульсов, фазовый детектор, фазовый модулятор и дифференцирующую цепочку, отличающийся тем, что, с целью упрощения устройства, повышения стабильности и чувствительности, фазовый модулятор выполнен в виде ждущего мультивибратора, нричем выход формирователя импульсов подключен к сигнальному входу ждущего мультивибратора, выход которого соединен с дифференцирующей цепочкой, а управляющий вход с выходом фазового детектора, к одному из входов которого
подключен источник опорного сигнала.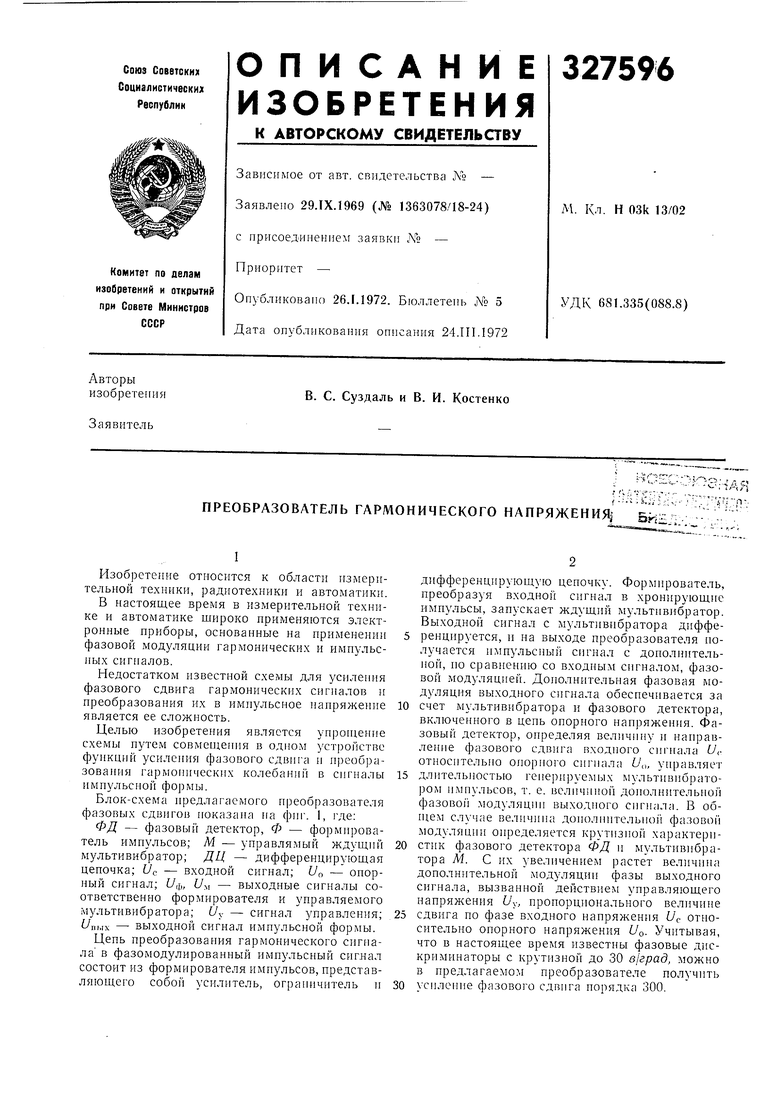
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ДЕФЕКТОСКОП | 1973 |
|
SU386331A1 |
| ДЕМОДУЛЯТОР СИГНАЛА ФАЗОВО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ для РАДИОРЕЛЕЙНЫХ ЛИНИЙ СВЯЗИ | 1970 |
|
SU265979A1 |
| Программный генератор | 1983 |
|
SU1190484A1 |
| Устройство для автоподстройки частоты | 1975 |
|
SU554605A1 |
| УМНОЖИТЕЛЬ ЧАСТОТЫ | 1972 |
|
SU429503A1 |
| Формирователь линейно-частотно-модулированных сигналов | 1986 |
|
SU1424112A1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР | 1995 |
|
RU2097785C1 |
| ИМПУЛЬСНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВЕСА 1 мБУМАГИ НА БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЕ | 1959 |
|
SU126356A1 |
| Устройство для измерения динамических напряжений в бетоне | 1985 |
|
SU1278630A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |