Изобретение относится к области техники, связанной с контролем параметров и изучением магнитных свойств ферромагннтны.х материалов в виде сверхтонкого проката и иленок, используемых в качестве запоминающей среды для запоминающих устройств, в качестве сердечников для трансформаторов и т. д.
Известные устройства для измерения направления вектора намагниченности в локальных областях ферромагнитных материалов состоят из двух генераторов в)сокочастотных сигналов разных частот /i и /а, соеднненных с двумя ортогональными витками, индуктивного датчика. К одному нз витков подключен селектирующий фильтр, настроенный на суммарную частоту (/1 + /2). Выход фильтра соединен со входом узкополосного усилителя, к выходу которого подключен детектор. Нагрузкой детектора является индикатор.
Иедостатками известных устройств являются: механнческое вращение датчика, механическая щкала отсчета измереннй, участие оператора в процессе измерения. Вследствие указанных недостатков устройства не могут быть использованы для дннамичеекнх нсследоваиий ферромагнитных материалов (т. е. исследований при быстрых изменениях угла ориентации вектора намагниченности).
измерения ограничивается необходимостью отсчета по мехапнческой шкале.
Цель изобретения - разработка устройства для измереиия направления вектора намагниченности в локальной области ферромагнитного материала в виде сверхтонкого проката и пленок, нозволяющего автоматически и с высокой точностью измерять величину угла ориентации вектора намагниченности jj
его днсперсию при быстром перемещении ферромагнитного материала, свободного от воздействия переменных внешних .магнитных нолей и механических нанряжеций.
Поставленная цель достигается нутем введення электронного измерительного устройства, подключенного к выходу детектора.
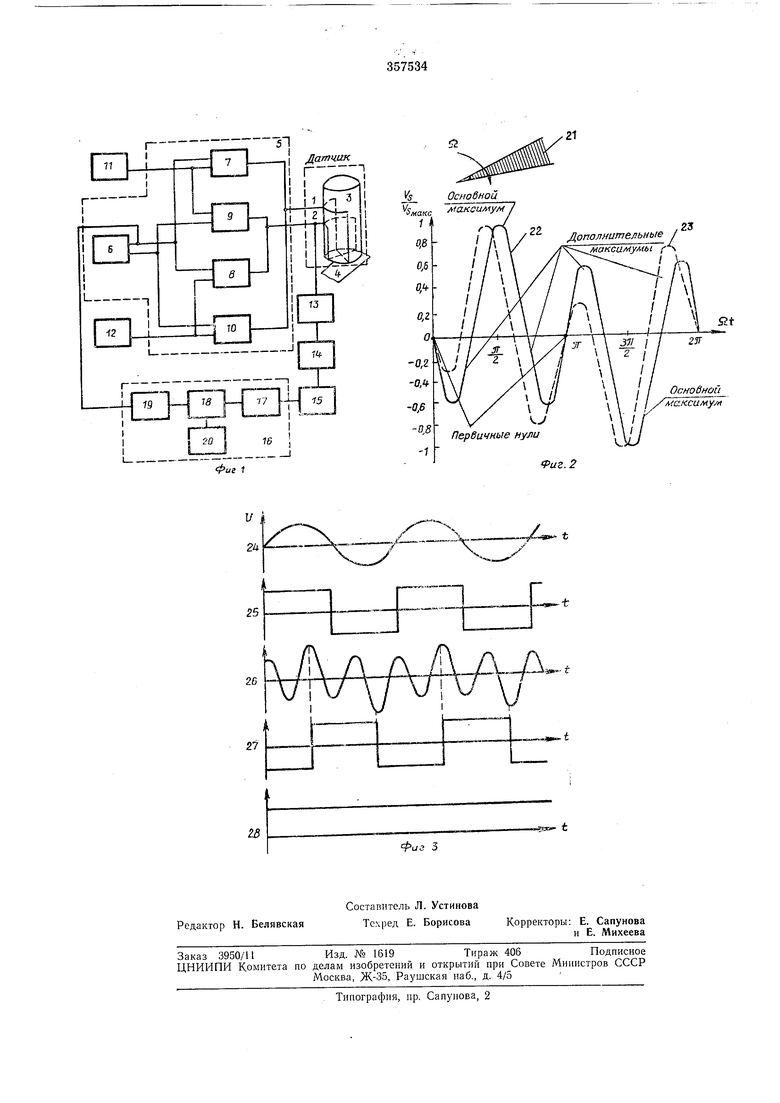
Электронное измерительное устройство состоит из схемы выделения основного максимума, фазового детектора, синхронизатора и регистрирующего устройства. Схема выделения основного максимума соединена с одним входом фазового детектора, а другой его вход соединен с синхронизатором, иодключенным к одному из выходов геиератора сигналов частоты модуляции. Выход фазового детектора соединен с регистрирующим устройством (нанример, осциллографом). 3 на фиг. 2 - вид огибающей выходного напряжения датчика Уз комбинационной частоты за один период вращения (Т-- результиV FM J рующего вектора напряженности поля воз-5 буждения для двух значений угла во; на фиг. 3 - временные диаграммы, поясняющие принцип работы электронного измерительного устройства. Индуктивный датчик, состоящий из двух10 взаимно перпендикулярных витков / и 2, укрепленных на неметаллическом стержне 3, установлен вблизи поверхности ферррмагнитного образца 4. Формирователь высокочастотного качающегося и вращающегося электри-15 чески электромагнитного поля датчика 5 состоит из генератора 6 сигналов частоты модуляции и четырех амплитудных модуляторов 7, 8, 9, 10. Генератор 6 имеет два выхода, подключенные к попарно соединенным входам че-20 тырех амплитудных модуляторов 7-8 и 9-10. Выходы амплитудных модуляторов попарно соединены (7-10 и 8-9) и подключены к виткам индуктивного датчика. Генератор 11 сигналов высокой частоты fi25 соединен со вторыми входами амплитудных модуляторов 7 и Я а генератор 12 сигналов высокой частоты fa соединен со вторыми входами амплитудных модуляторов 8 и 10. К витку 2 датчика подсоединен селектп-30 рующий фильтр 13, настроенный на одну из комбинационных частот, например, суммарную (/i+fa)- Фильтр 13 соединен с усилителем 14, к выходу которого подключен детектор 15.35 Электронное измерительное устройство 16 состоит из схемы 17 выделения основного максимума выходного напряжения датчика, фазового детектора 18, синхронизатора 19 и регистрирующего устройства 20.40 Выход схемы 17 подключен к одному входу фазового детектора 18, к другому его входу подключен синхронизатор 19, соединенный с одним из выходов генератора 6. Выход фазового детектора 8 соединен с регистрирующим45 устройством 20 (например, осциллографом), а вход схемы 17 с выходом детектора 15. Работает устройство следующим образом: генератор 11 генерирует сигналы высокой частоты fi, поступающие на одни входы ампли-50 тудных модуляторов 7 н 9. На другой вход амплитудного модулятора 7 поступают опорные сигналы частоты модуляции FM с одного из выходов генератора 6, а на другой вход модулятора 9 со второго выхода генератора 655 поступают сигналы частоты модуляции FM, сдвинутые по фазе на 90° но отношению к опорному сигналу. Генератор 12 генерирует сигналы высокой частоты fa, поступающие на входы амплитудных модуляторов 8 и 10. На60 другой вход модулятора 8 поступают опорные сигналы частоты модуляции FM с одного из выходов генератора 6, а на другой вход моду4сдвинутые по фазе на 90° по отношению к опорному сигналу. Таким образом, на индуктивный датчик поступают четыре высокочастотных сигнала. На виток 1 датчика поступают сигналы частоты /i, модулированные по амплитуде опорным сигналом частоты модуляцни FM, и сигналы частоты 2, модулированные но амплитуде сигналом частоты модуляции FM, сдвинутым по фазе на 90° по отношению к опорному сигналу, а на виток 2 датчика ностунают сигналы частоты /2, модулированные по амплитуде опорным сигналом частоты модуляпии м, и сигналы частоты fi, модулированные по амплитуде сигналом частоты модуляции FM, сдвинутым по фазе на 90° по отношению к опорному сигналу, причем коэффициенты модуляции для всех четырех сигналов равны единице. Такая совокупность сигналов определенных амплитуд приводит к образованию высокочастотного качающегося и вращающегося электрически электромагнитного поля датчика такой величины, которая не вызывает необратимых изменений намагниченности в ферромагнитном материале. Качание результирующего вектора напряженности поля датчика образуется за счет взаимодействия высокочастотных электромагнитных полей частот fi и /2, а вращение его образуется за счет 100%-пой модуляции высокочастотных токов в ортогональных витках и сдвига фаз модулирующих сигналов на 90°. На фиг. 2 представлен вид огибающей компоненты выходного напряжения датчика Vs на суммарной частоте (fi + f2) за один период ращения поля возбуждения (Т. . Поз. FM J 21 обозначена зона высокочастотного качания результирующего вектора поля, составляющая 1°-2°. Здесь 0. 2пРм - угловая частота вращения поля. Возбуждение ферромагнитиого материала слабым высокочастотным полем данной конфигурации приводит к появлению составляющей потока с комбинационной частотой, нанример, суммарной (fi+f2), которая регистряруется витком 2 датчика. Величина и фаза этого потока зависят от величины угла Q, характеризующего полол еиие результирующего вектора поля датчика по отношению к положению вектора намагниченности ферромагнитного материала. Кривые 22 и 23 получены в результате расчета по аналитическому выражению, приведенному ниже, для двух значений угла 0о, определяюшего ноложение вектора намагниченности относительно оси легкого намагничивания ферромагнитного материала. Кривая 22 отражает зависимость величины компоненты выходиого напряжения датчика Vs на суммарной частоте от Qt (где t - время) при , а кривая 23 отражает ту же зависимость при .
имеется шесть максимумов и шесть нулевых значений компоненты выходного нанряжения датчика на суммарной частоте. Информацию о положении вектора намагниченности несут только два нулевых значения (при Q/ 0 н й/ я), называемых первичными нулями (см. фиг. 2). Положение других четырех нулей, а также величина и положение основных и доиолнитсльных максимумов зависят от величины во и, следовательно, не могут быть использованы для измерения наиравлення вектора намагниченности ферромагнитного материала при воздействии на него неременнЕ гх внешних возмушений (магнитного ноля, механических усилий и т. д.). Однако в случае, если влияние переменных внешних воздействий на ферромагнитный материал отсутствует, для измерения направления вектора намагниченности может быть использовано положение
основного максимума (нрн й/ - ;
0/
а влияние постоянных внешних
воздействии на положение основного максимума может быть учтено в виде постоянной поправки. Это свойство формы огибающей выходного напряжения датчика на су.ммарной частоте (fi + fz) и используется в данном устройстве для измерения направления вектора намагниченности.
Селектируюш1ий фильтр 13 выделяет из обш,его сигнала, снимаемого с витка 2 датчика, компоненту суммарной частоты, которая усиливается затем усилителем М и подается иа детектор 15. Огибаюи ая выходного напряжения датчика на суммарной частоте подается на схему 17 выделения основного максимума, производяш,ую выделение моментов времени основных максимумов и формирование импульсов, подаваемых на вход фазового детектора 18, на другой вход которого подается опорная последовательность импульсов, сформироваииая синхронизатором 19 из сигналов частоты модуляции Гм- Фазовый детектор 18 измеряет фазовый сдвиг между опорной последовательностью импульсов и последовательностью измерительных импульсов. Величииа этого сдвига пропорциональна величиие угла ориентации вектора иамагничеиности, так как основной максимум выходного напряжения датчика на суммарной частоте появляется в тот момент времени, когда результирующий вектор напряженности ноля возбуждения расиоложен под углом 90° к вектору намагниченности. Регистрирующее устройство (например, осциллограф) регистрирует величину угла или его дисперсию во времени ири перемещении ферро.магнитного материала относительно неподвижного в момент измерения датчика.
Па временной диаграмме (см. фиг. 3) кривой 24 показан сигнал частот 1 модуляции FM, а tia кривой 25 сформированная из иего синхронизатором 19 оиориая иоследовательность импульсов. Кривой 26 показано выходное напряжение с
детектора 15, а кривой 27 сформированная из иего носледовательность измерительиых импульсов.
На кривой 28 показано выходное напряжеиие фазового детектора, пропорциональное
величиие фазового сдвига измерительной последовательности нмпульсов относительно опорной, т. е. пропорциональное величине угла ориентации вектора намагниченности.
25
Предмет изобретения
Устройство для измерения направления вектора намагниченности в ферромагнитных
материалах в виде сверхтонкого проката и пленок, содержащее два генератора высокочастотных сигналов, формирователь высокочастотного качающегося и вращающегося электрически магнитного поля датчика, индуктивный датчик, состоящий из двух укрепленных на неметаллическом стержне взаимно перпендикулярных витков, к одному из которых подключен селектирующий фильтр, связанный через усилитель с детектором, отличающееся тем, что, е целью иовышения точности измерения величины угла ориентации вектора намагниченности и ее дисперсии, оно снабжено схемой выделения основного максимума, фазовым детектором и ciiHxpo)niзатором, вход которого подключен к одному из выходов генератора с{1гналов частоты модуляции, а выход - к одному нз входов фазового детектора, другой вход которого соедиFieH со схемой выделения основного максимума, подключенной к выходу детектора, а выход фазового детектора связан с регистрирующим устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИНАМИЧЕСКОГО РАСПРЕДЕЛЕНИЯ МАГНИТНОЙ ВОСПРИИМЧИВОСТИ ФЕРРОМАГНЕТИКА | 2011 |
|
RU2467342C1 |
| Способ определения резонанса измерительной цепи и устройство для его осуществления | 1990 |
|
SU1725161A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2300774C1 |
| СИСТЕМА РАДИОСВЯЗИ | 1993 |
|
RU2085039C1 |
| СИСТЕМА РАДИОСВЯЗИ | 1998 |
|
RU2150175C1 |
| Способ определения разности резонансных частот датчиков | 1985 |
|
SU1285394A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОВЫШЕННОЙ ИМИТОСТОЙКОСТЬЮ | 2000 |
|
RU2188505C2 |
| ТОНКОПЛЕНОЧНАЯ МАГНИТНАЯ АНТЕННА | 2019 |
|
RU2712922C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНЫХ ХАРАКТЕРИСТИК ФЕРРОМАГНИТНЫХ ПЛЕНОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714314C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |