1
Изобретение относится к счетно-вычислительной технике. Устройство предназначено в основном для автоматического чтения информации в области химии, т. е. рукописных текстов, наносимых в соответствии с определенными ограничениями, и структурных формул химических соединений, изображаемых на специальном бланке.
Известны устройства для считывания и опознавания изображений, содержащие блок электронно-оптического считывания, блок анализа и блок согласования в ЭВМ, связанных между собой электрически.
Эти устройства читают с листа бумаги машинописные буквы и цифры, используя для распознавания знаков метод фрагментов. Однако они обеспечивают распознавание небольшого количества знаков при стандартном их написании (шрифт пишущих машинок одного типа).
Метод фрагментов не может обеспечить высокой надежности распознавания знаков.
Известен также блок ввода изображений с кинопленки в цифровую вычислительную машину, определяющий положение луча на поле кадра. Этот блок вводит изображение в вычислительную машину и указывает положение на поле отдельных частей изображения благодаря применения узла отсчета координат с использованием оптики.
Цель изобретения - упрощение устройства, сокращение объема памяти и ускорение ввода в ЭВМ сложных изображений, распознавание печатных и рукописных знаков, а также
измерение и запись в ЭВМ координат объектов. Достигается она тем, что в предлагаемое устройство введены последовательно соединенные блок выделения структурных признаков и блок составления кодовых описаний, причем
входы блока выделения структурных признаков соединены с соответствующими выходами блока динамического хранения изображения, выход блока составления кодовых описаний подключен ко входу блока согласования, а соответствующие входы - к выходам узла отсчета координат.
Блок выделения структурных признаков состоит из набора анизотропных фильтров, выходы которых соединены с соответствующими входами схем совпадений.
Блок составления кодовых описаний содер жит коммутатор, счетчики, схему сравнения, оперативное запоминающее устройство для эталонов структурных описаний знаков и схему деления знака на зоны, причем входы коммутатора подключены ко входам блока, выходы - через счетчики к одной группе входов схемы сравнения, к другой группе входов которой подсоединены выходы оперативного запоминающего устройства, а выход схемы де3
леиия знака на зоны соединен с управляющим входом коммутатора.
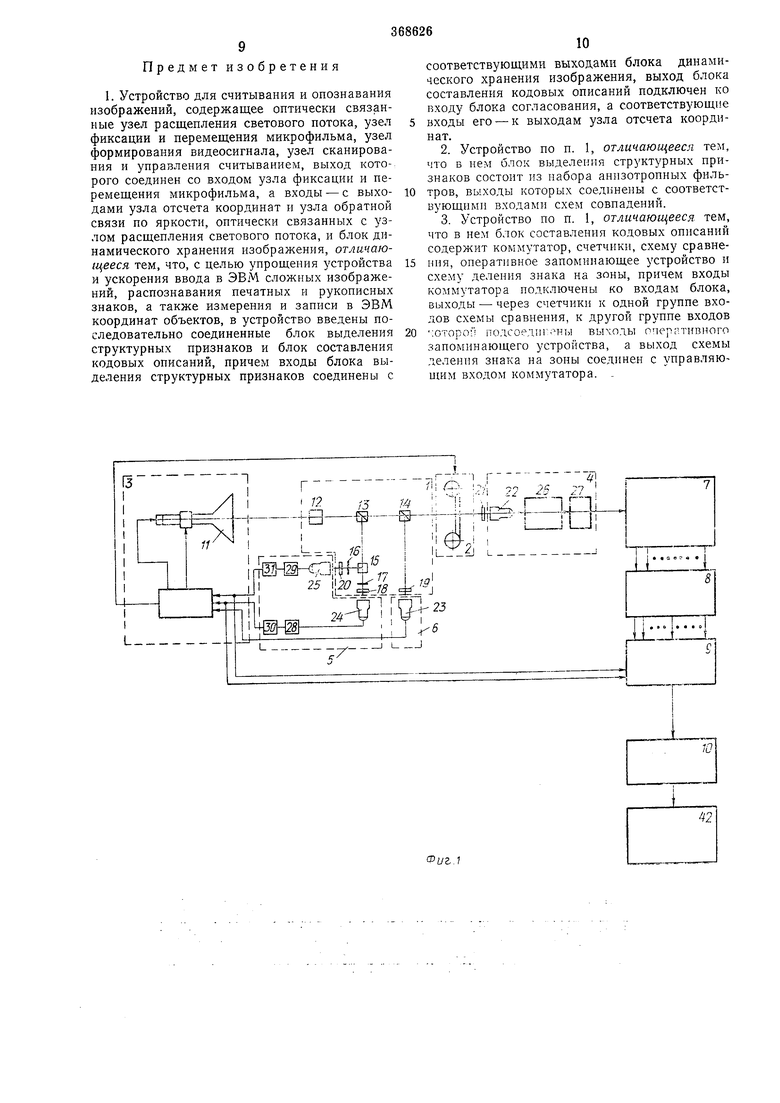
На фиг. 1 показана функциональная схема устройства для считывания и опознавания изображений; на фиг. 2 - блок-схема блока выделения структурных признаков; на фиг. 3 - блок-схема блока составления кодовых описаний; на фиг. 4 - организация Е-системы.
Устройство содержит: узел расцепления светового потока /; узел 2 фиксации и перемещения микрофильма; узел сканирования и унравления считыванием 3, узел формирования видеосигнала 4, узел отсчета координат луча 5, узел обратной связи по яркости 6, блок динамического хранения изображения 7, блок выделения структурных признаков 8, блок составления кодовых описаний 9, блок согласования 10, электроннолучевую трубку 11, объектив 12j светоделительные призмы 13-15, реперные решетки 16 и 17, конденсоры 18-21, фотоэлектронные умножители 22-25, видеоусилитель 26, квантователь 27, усилители-формирователи 28 и 29, счетчики положения луча 30-31, анизотропные фильтры 32, схему деления знака на зоны 33, пороговые счетчики 34-37, коммутатор 38, схему сравнения 39, оперативное запоминающее устройство 40, схемы совпадения 41.
Узел сканирования и управления считыванием 3 с питанием служит для организации растра на экране электронно-лучевой трубки 11, которая создает точечный источник света, последовательно сканирующий всю площадь изображения.
Узел расщепления светового потока / передает изображение с экрана электронно-лучевой трубки 11 на поверхность микрофильма с уменьшением. Кроме того, он расщепляет световой поток от трубки на четыре составляющих: основной поток, формирующий видеосигнал и несущий информацию о степени занерненности участка изображения, два потока для измерения координат луча X и Y я один поток для обратной связи по яркости и компенсации неравномерности свечения экрана трубки. Узел расщепления светового потока состоит из объектива 12, трех светоделительиых призм-кубов для расщепления луча, реперных решеток 16 и 17 для отсчета положения луча в каждый момент времени и конденсоров 18-21, стоящих перед каждым из четырех фотоэлсктронги х умножителей 22-25. Узел 2 фиксации и перемещения микрофильма служит для транспортировки 35-миллиметрового кинофильма. Смена кадров происходит по специальному сигналу окончания чтения и записи в электронно-вычислительной машине.
Узел формирования видеосигнала 4 состоит из фотоэлектронного умножителя (ФЗУ) 22, видеоусилителя 26 и квантизатора видеосигнала 27. Узел отсчета координат луча 5 состоит из ФЗУ 24 и 25, усилителей-формирователей 28 и 29 и счетчиков 30 и 31 положения луча по каждой из координат X w. Y,
Логическая и анализирующая часть устройства включает регистр динамического хранения изображения 7, блок выделения структурных признаков 8 и блок составления кодовых описаний 9.
Для формирования структурных признаков различных типов служит радиально-концентрическая система анизотропных фильтров 32 блока выделения структурных признаков 8, которую мы будем называть Е-системой.
С квантователя 27 сигнал поступает на вход блока динамического хранения изображения 7, выполненного в виде двумерного регистра на триггерах. Их выходы соединены со входами анизотропных фильтров 32.
Каждый анизотропный фильтр состоит из четырех наборов весовых сопротивлений, коррелирующих наилучшим образом с одним из четырех направлений, и схемы выбора максимума. Он работает как классификатор, который относит каждую точку изображения к одному из четырех направлений, угол между
которыми равен . Таким образом он рыде4
ляет горизонтальные, вертикальные и наклонные элементы изображений. Путем объединения (фиг. 2) при помощи схем совпадения 41 различных комбинаций фильтров Е-системы формируются структурные элементы различных типов. Фактически Е-система позволяет
получить узлы всех типов и любые отрезки дуг постоянной кривизны.
Описание объекта, сформированное в виде комбинаций структурных элементов различных типов, может быть опознано устройством.
Каждому такому объекту присвоен 8-разрядный код. В момент обнаружения изображения в зависимости от режима работы устройства на ЭВМ 42 может выдаваться либо только код объекта (в режиме автоматического чтеПИЯ текста) либо одновременно код объекта и его координаты. Устройство может работать в двух рел имах: как обычный читающий автомат и как устройство для считывания изображений. В режиме автоматического чтения
выдаются последовательно коды опознаваемых знаков. В режиме считывания происходят построчное считывание изображений и классификация считываемых участков, т. е. присвоение определенных кодов характерным
элементам изображения и выдача значений координат этих объектов.
Рассмотрим работу устройства в режиме автоматического чтения текста. Микрофильм, каждый код которого содержит либо текст, либо изображение, устанавливают в узел фиксации п перемещения 2, а кадр, содержащий текст, устанавливают против узла расщепления светового потока 1. Документ фотографируют на пленку с
уменьшением, и все размеры на кадре соответственно уменьшаются по сравнению с размерами документа. В начале и в конце каждой строки документа имеются маркеры, которые выравнивают строки развертки по отношению к строке текста на кадре независимо
от перекоса документа относительно кадра. Центровка положения развертки происходит путем измерения координат центров обоих маркеров, определения перекоса одного маркера относительно другого (что соответствует перекосу строки), определения числа, места и величины коррекции, которую необходимо ввести в строку развертки, в зависимости от требуемой точности считывания и величины перекоса.
При считывании текста важно обеспечить равномерность шага развертки по обеим осям, так как в противном случае возможны нелинейные деформации изображения или, в результате сжатия шага при изменении питающих напряжений, - выпадение части строки текста из пределов считываемой полосы на экране электронно-лучевой трубки. Дело в том, что вследствие флуктуации питающих напряжений отклоняющее напряжение может значительно изменяться, и фактическое положение луча может отличаться от заданного числами, хранящимися в счетчиках положения луча по координатам X и У блока 3 сканирования и управления считыванием. Если не ввести обратной связи по положению луча, ошибка может накаиливаться по мере перемещения луча по экрану электронно-лучевой трубки. Для борьбы с этим явлением служит система расщепления светового потока. Основной луч от светящегося пятна ЭЛТ проходит через объектив 12, светоделительные призмыкубы 13-15, пленку, конденсор 21, попадает в ФЭУ 22 узла видеосигнала 4 и формирует видеосигнал, иропорциональный оптической плотности в каждой точке кадра. Луч расщепляется на четыре части: помимо основного потока, два служат для измерения координат светового пятна X н Y, один - для обратной связи по яркости. На протяжении некоторого периода развертки запоминается средний уровень яркости и, если яркость свечения люминофора в данной точке отклоняется от среднего уровня, на управляющий электрод трубки 11 подается напряжение обратной связи, изменяющее ток луча, а следовательно, и яркость свечения данной площадки экрана трубки, приближая ее к среднему уровню.
Точное измерение фактических координат луча на пленке в данный момент происходит нри помощи реперных решеток 16, 17 при прохождении через них части светового потока от ЭЛТ, ответвленного светоделительными призмами-кубами 13, 15.
Рассмотрим работу системы измерения координат.
После занесения начальных координат Jo и Yn в счетчик, управляющий положением луча, начинается первая строка развертки. По мере движения луча по экрану ЭЛТ // часть светового потока, ответвленная призмами-кубями 13, 15, через реперные решетки 16 и 17 и конденсоры 20, 18 воздействует на ФЭУ, формируя видеоимпульсы, повторяющие чередование темных и светлнх полос на, реперных
решетках. Видеоимпульсы поступают на усилители-формирователи 28, 29 и далее на счетчики 30, 31, которые определяют истинные коордииаты луча.
Видеоимпульсы, возникающие при движении луча по решетке в пределах одной строки развертки, используются для стробирования сигнала с видеоусилителя 26 осиовиого канала, пропорционального оптической плотности микрофильма, в квантователе 27. Иными словами, отсчеты изображения берутся тогда, когла луч пересекает черные полосы реперных решеток. Благодаря этому обеспечивается равномерность щага развертки.
Строки документа считываются последовательно одна за другой, причем каждый раз происходит корректировка по обоим маркерам. После считывания последней строки блок управления считывагиедг выдает сигнал в -зел
фиксации и перемещения микрофильма, по которому устанавливается следующий кадр. Видеосигнал с ФЭУ 22 основного канала поступает на видеоусилитель 26, где квантуется по двум уровням. Сигнал, квантованный по
уровню, поступает в квантователь 27, в котором преобразуется в цифровой код и поступает на входной триггер сдвигового регистра блока дииамического хранения изображеиия. Сдвиговый регистр содержит запоминающих элементов, где Л - число дискретных точек в одной строке развертки, а Л1 - максимальная ширина объекта, выраженная в элементах растра. Регистр служит фактически для того, чтобы получить изображение сигнала
в параллельном виде в форме двумерного поля электрических сигналов. Необходимость в регистре обусловливается тем. что изображение считывается последовательно точка за точкой, а для пространственной фильтрации
изображения необходимо иметь возможность одновременно суммировать сигналы от различных его участков.
Признаки обнарул иваются при помощи анизотропных фильтров 32, образующих Е-систему, которая позволяет выделять топологические особенност изображений различных типов, а также дуги окружности в качестве самостоятельных признаков. Каждый фтьпьтр содержит четыре набора весовых сопротивлений
и схему выбора максимума. Каждый набор весовых сопротивлений наилучшим образом коррелирован с одним из четырех направлений. Входы весовых сопротивлений подключены к регистру блока динамического хранения
изображения, хранящему изображение, таким образом, что образуют «окно размером 7X7 элементов изображения. В зависимости от направленности изображения в данном месте сумма сигналов одного из наборов весовых
сопротивлений удет наибольшей. Другими f лова ми. фильтр , состояшнй из весовых сг пг тивтений,-схемы выбора гаксиму тя и регистра блока динамического хранения изображения, определяет ориентацию в центральной
точке участка изображения, зяключенного в
пределах «окна из 7X7 элементов. При движении изображения по сдвиговому регистру центр окна последовательно совмещается с каждой точкой изображения, и таким образом каждой точке присваивается определенное направление.
Е-система представляет собой совокупность анизотропных фильтров, расположенных на концентрических окружностях с равными интервалами в я/4 или я/8°, как показано на фиг. 4.
Благодаря тому, что имеется возможность определять одновременно направленность элементов изображения в различных его точках, Е-система позволяет выделять не только элементы различных направлений, но также концевые, узловые точки и дуги, измеряя одновременно кривизну, ориентацию и длину дуги, Так, например, объединяя при помопди схемы «И выходы фильтров I, III и V (фиг. 4), реагируюпдие соответственно на напряжения О,
-}- -,- , можно выделить узел вида }-.
Объединив выходы фильтров //, IV, VII с направлениями + -, О и - - соответственно, 44
можно получить в результате выделения узел вида -.
Е-система позволяет обнаружить на изображении полную систему признаков, состоящих из отрезков прямых, узлов различной кратности и дуг различной кривизны. Эта система признаков дает возможность распознавать как типографские, так и рукописные знаки, а также анализировать и раскладывать на компоненты более сложные штриховые изображения.
По мере движения изображения по регистру блока динамического хранения изображения центральный анизотропный фильтр 32 Е-системы обнаруживает ориентированные линии, концы и точки разветвлений, а фильтры, связанные с ним, обнаруживают узлы и дуги. Координатная Е-система обнаруживает структурный элемент как сочетание определенных направлений и в то же время проверяет наличие фактической связи между объединяемыми элементами изображения.
Признаки букв, выделяемые при помощи Е-системы, служат для опознавания. Предполагается, что между буквами имеется зазор достаточной величины, чтобы можно было определить начало и конец каждого знака. Каждый знак обрабатывается два раза, причем вначале производится определение размеров знака, а затем анализ. Изображение знака считывается и поступает в регистр блока динамического хранения изображения, где измеряются его высота и ширина.
Для данного ансамбля знаков выбирается К различных типов признаков, к числу которых могут относиться ориентированные концы, ориентированные линии, узлы различной кратности и ориентации и дуги, фиксируется наличие признака данного типа у знака и его местонахождение.
Местонахождение признака фиксируется путем разделения поля растра на L зон, которое осуществляется схемой деления на зоны 33 (фиг. 3). Наличие признака в зоне определяется с помощью пороговых счетчиков 34- 37, которые фиксируют наличие признака только в том случае, если количество сигналов,
соответствующих данному признаку, в данной зоне превышает некоторый порог. Сигналы с Е-системы на соответствующие счетчики распределяются коммутатором 38, работой которого управляет схема деления знака на зоны.
Таким образом, после анализа изображения на выходах счетчиков 34-37 получается /СХ -разрядное описание этого изображения. Это описание сравнивается на схеме сравнения 39 с эталонными описаниями знаков в
оперативном заполняющем устройстве 40 блока составления кодовых описаний 9.
В результате сравнения выдается код знака, с которым максимально совпал считываемый знак.
После того как знак распознан, его код через блок 10 согласования с ЭВМ записывается в память электронно-вычислительной мащины. Рассмотрим работу устройства в режиме
считывания изображений.
Для записи структурных формул используют документы специального вида. На бланках нанесены краской, не проявляющейся на фотопленке при съемке с определенным светофильтром, клетки и их центры. Структурные формулы и другие изображения рисуют таким образом, чтобы точки разветвления контура совпали с центром клетки, а все элементы, такие, как знаки и буквы, поместились
в пределах одной клетки.
Благодаря тому, что каждой ячейке кадра последовательно и обязательно соответствует какой-нибудь код, нет необходимости выдавать
координаты объекта, последовательность их обусловлена заранее. Координаты объектов можно измерить в режиме, когда изображение также считывается полосами, но положение объекта в пределах полосы может быть
произвольным. В момент обнаружения объекта из заданного списка в памяти автомата мгновенно отсчитываются его координаты. Эти значения через блок согласования с ЭВМ одновременно с кодом объекта записываются
в память электронно-вычислительной машины. Вместо точного адреса объекта может выдаваться адрес клеточки, в которой он обнаружен.
Таким образом, устройство считывает изображение по частям, анализирует его, выделяет на изображении структурные элементы, составляет описание объекта и сравнивает его с эталонными описаниями, определяет их координаты и записывает в ЭВМ номер объекта
и его координаты.
Предмет изобретения
1. Устройство для считывания и опознавания изображений, содержащее оптически связанные узел расщепления светового потока, узел фиксации и перемещения микрофильма, узел формирования видеосигнала, узел сканирования и управления считыванием, выход которого соединен со входом узла фиксации и перемещения микрофильма, а входы - с выходами узла отсчета координат и узла обратной связи по яркости, оптически связанных с узлом расщепления светового потока, и блок динамического хранения изображения, отличающееся тем, что, с целью упрощения устройства и ускорения ввода в ЭВМ сложных изображений, распознавания печатных и рукописных знаков, а также измерения и записи в ЭВМ координат объектов, в устройство введены последовательно соединенные блок выделения структурных признаков и блок составления кодовых описаний, причем входы блока выделения структурных признаков соединены с
соответствующими выходами блока динамического хранения изображения, выход блока составления кодовых описаний подключен ко входу блока согласования, а соответствующие входы его - к выходам узла отсчета координат.
2.Устройство по п. 1, отличающееся тем, что в нем блок выделения структурных признаков состоит из набора анизотропных фильтров, выходы которых соединены с соответствующими входами схем совпадений.
3.Устройство но п. 1, отличающееся тем, что в нем блок составления кодовых описаний содержит коммутатор, счетчики, схему сравнеПИЯ, оперативное запоминающее устройство и схему деления знака на зоны, причем входы коммутатора подключены ко входам блока, выходы - через счетчики к одной группе входов схемы сравнения, к другой группе входов
-lOTOpoi ; подсоед Г:- ны выходы оперативного запоминающего устройства, а выход схемы деления знака на зоны соединен с управляюншм входом коммутатора. 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1973 |
|
SU385269A1 |
| Информационно-поисковая система | 1973 |
|
SU525104A1 |
| Устройство для считывания графической информации | 1985 |
|
SU1339605A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ | 1992 |
|
RU2051416C1 |
| УСТРОЙСТВО ВВОДА ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1973 |
|
SU368629A1 |
| Телевизионное устройство для селекции объектов | 1990 |
|
SU1795478A1 |
| Устройство для считывания штриховой информации | 1986 |
|
SU1606981A1 |
| Способ считывания графической информации | 1983 |
|
SU1236520A1 |
| Телевизионное устройство для селекции объектов | 1987 |
|
SU1472919A1 |
| Способ считывания графической информации | 1984 |
|
SU1233192A2 |

Ii J/5/- : ,-1а.....-:.| пйчж- гсМ. I 2 fefeS ij Щ : i I -r . i II i . -j-Htj
о
.оо.
°ч .. хО
/ v.4-x
° о/
о
л ,
/ /
/ж
о-о-ю
о:
оо/
ь
я/
о / о
о
о
- о - л /
V-o.to-%/
Фиг.5
о I
Фиг.
