1
Изобретение относится к области контрольно-измерительной техники и может быть использовано для измерения угловых перемещений объектов.
Известный преобразователь угловых перемещений содержит магнитопровод, в зазоре которого размещен датчик ядерного магнитного резонанса, спиновый генератор и индикатор. Частота выходного сигнала датчика изменяется при относительном вращении двух постоянных магнитных полей, создаваемых магнитом и установленной на валу датчика катушкой стабильного тока.
Недостатком известного преобразователя является низкая точность измерения из-за нестабильности магнитного поля, создаваемого магнитной системой, и тока питания катушки стабильного тока, а также из-за нелинейной зависимости выходного сигнала от измерительного перемещения.
В предлагаемом изобретении этот недостаток устраняется за счет того, что в магнитопрОБоде выполнены дополнительно три зазора, а преобразователь снабжен вторым датчиком ядерного магнитного резонанса, установленным в одном из дополнительных зазоров, вторым спиновым генератором, вход которого соединен с выходом второго датчика, двумя якорями, закрепленными на валу и размещенными по втором и третьем дополнительных зазорах, и блоком выделения разностной , входы которого соединены с выходами спиновых генераторов, а выход-- с индикатором.
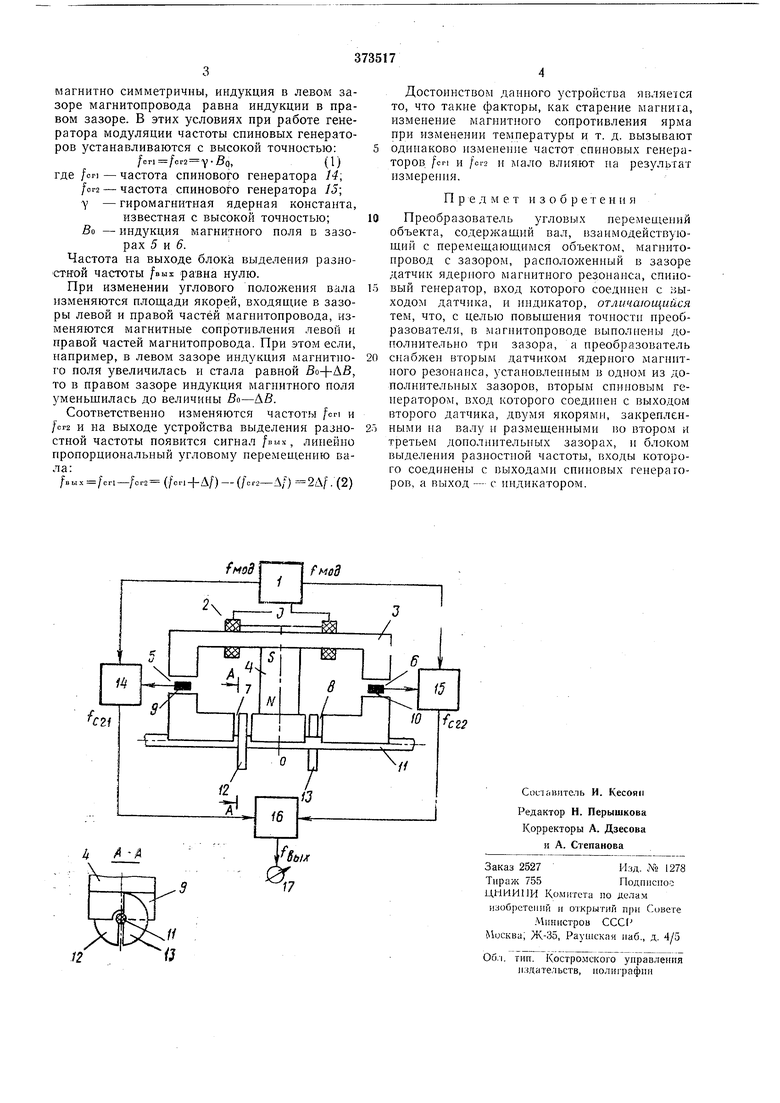
На чертеже представлен предлагаемый преобразователь, содержащий генератор / модуляции, катушки 2 модуляции, магнитопровод .У с магнитом 4 и зазорами 5, 6, 7, 8.
В зазорах 5, 6 расположены датчики 9, 10 ядерного магнитного резонанса.
Преобразователь содержит также вал /У с якорями 12, 13, помещенными в зазоры 7, 8 магнитопровода, спиновые генераторы J4, 15, блок 16 выделения разностной частоты и индикатор 17.
Якоря 12, 13 из ферромагнитного материа.11а закреплены на валу со смещением один относительно другого на 180°. Магнитопровод симметричен относительно оси 0-0. В правом и левом зазорах между нижним
11 верхним ярмом магнитопровода расположены датчики ядерного магнитного резонанса, подключенные к спиновым генераторам. Выход генератора модуляции соединен с обмотками катушек модуляции и спиновыми генераторами.
Преобразователь работает следующим образом.
В начальном положении площади якорей, входящие в зазоры нижнего ярма, равны. При
этом правая и левая части магнитопровода магнитно симметричны, индукция в левом зазоре магнитопровода равна индукции в правом зазоре. В этих условиях при работе генератора модуляции частоты спиновых генераторов устанавливаются с высокой точностью: ,(1) где /СП - частота спинового генератора 14, /СГ2 - частота спинового генератора /о; Y - гиромагнитная ядерная константа, известная с высокой точностью; Во - индукция магнитного поля в зазорах 5 и 6. Частота на выходе блока выделения разностной частоты /ВЫ1 равна нулю. При изменении углового положения вала изменяются площади якорей, входящие в зазоры левой и правой частей магнитопровода, изменяются магнитные сопротивления левой и правой частей магнитопровода. При этом если, например, в левом зазоре индукция магнитного поля увеличилась и стала равной So+AS, то в правом зазоре индукция магнитного поля уменьшилась до величины So-Дб. Соответственно изменяются частоты fen и /СГ2 и на выходе устройства выделения разностной частоты появится сигнал /вы., линейно пропорциональный угловому перемещению ват{ц /вых /-сг,-/ог2 (fcri+Д/) - (/ОГ2-А/) 2Af. (2) Достоинством данного устройства является то, что такие факторы, как старение магнига, изменение магнитного сопротивления ярма при изменении температуры и т. д. вызывают одинаково изменение частот спиновых генераторов /СП и /CI-2 н мало влияют на результат измерения. Пред м е т и з о б р е т е н и я Преобразователь угловых перемещений объекта, содержащий вал, взаимодействующий с перемещающимся объектом, магннтопровод с зазором, расположенный в зазоре датчик ядерного магнитного резонанса, спииовый генератор, вход которого соединен с ;5Ыходом датчика, и индикатор, отличающийся тем, что, с целью повыщения точности преобразователя, в магнитонроводе выполнены дополнительно три зазора, а преобразователь снабжен вторым датчиком ядерного магнитного резонанса, установленным в одном из дополнительных зазоров, вторым спиновым генератором, вход которого соединен с выходом второго датчика, двумя якорями, закрепленными на валу н размещенными во втором и третьем дополнительных зазорах, н олоком выделения разностной частоты, входы которого соединены с выходаами спиновых генерагоров, а выход - с индикатором.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЕ УСТРОЙСТВО для ИЗМЕРЕНИЯ ТОЛЩИНЫ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 1973 |
|
SU389392A1 |
| Устройство для преобразования линейных перемещений в частоту | 1986 |
|
SU1404801A1 |
| Способ поиска зоны резонанса в спиновых детекторах | 1989 |
|
SU1711106A1 |
| ПРЕОБРАЗОВАТЕЛЬ ТОКА В ЧАСТОТУ СЛЕДОВАНИЯИМПУЛЬСОВ | 1972 |
|
SU354560A1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2018 |
|
RU2679630C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ КОЛЕБАНИЙ В СПИНОВОМ ГЕНЕРАТОРЕ | 1964 |
|
SU166385A1 |
| Устройство для преобразования линейных перемещений в частоту | 1987 |
|
SU1527483A1 |
| Устройство для бесконтактного измерения постоянных токов | 1982 |
|
SU1089523A1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2016 |
|
RU2645909C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
