1
Изобретение относится к области контрольно-измерительной техники и предназначено для непрерывного определения угловых перемещепий объекта.
Известен автоколлиматор для измерения угловых перемещений объекта, содержащий объектив, анализирующую призму со светящейся фаской, расположенную за объективом, микрометрический винт, датчик угла новорота микрометрического винта, двигатель отработки и фотонриемники с электронным блоко.м.
Работа известного автоколлиматора основана на сравнении световых потоков на гранях анализируюплей призмы с последующей выработкой управляющего электрического сигнала, зависян его от разности этих световых потоков, для перемещения анализирующей призмы в фокальной плоскости объектива. Иоложение анализирующей призмы относительно исходного является информацией об угловом неременхении объекта.
Однако при отслеживании анализирующей призмой углового перемещения объекта энергетические центры световых пятен, попадающих на фотоприемники, перемещаются, и вследствие неравномерности чувствительности фотоприемников по площади возникает ошибка в определении углового положения объекта.
.jr-i U J
Фон, ноявляюни1Йся нрн отражении нучка света, выходящего из фаски анализирующей призмы, от поверхности компонентов объектива из-за неремещений анализируюн1ей призмы различным образом раснределяется в фокальной плоскости системы, что вызывает ошибки в определении углового положения объекта. Кроме того, применение подвижной анализирующей призмы требует точного согласовання цены делення (шага микрометрического винта) анализирующего устройства с параметрами объектива - фокуспым расстоянием и т. д. Точность определения углового положения
объекта определяется отнон1еиием точности измерения линейного неремещення анализирующей призмы к фокусному расстоян по объектива, что нри заданном фокусном расстоянии требует применення дорогостоящих высокоточных механизмов измерения линейных неремещений.
Предлагаемый автоколлиматор отличается от известного тем, что с целью повышения точности измерения он снабжен тремя установленными перед объективом плоскопараллельными стеклянными нластинами, две из которых неподвижны и параллельны между собой, а третья расположена между ними с возможностью поворота относительно перпендикулярной плоскости из rcpeния оси н кинемагически связана с датчиком угла поворота и двигателем отработки, и сильфоиами, торцы которых образованы неподвижными пластинами, а объем разделен поворотной пластиной на две части, заполняемые двумя жидкостями с различными коэффициентами преломления, например, спиртом метиловым и этиловым.
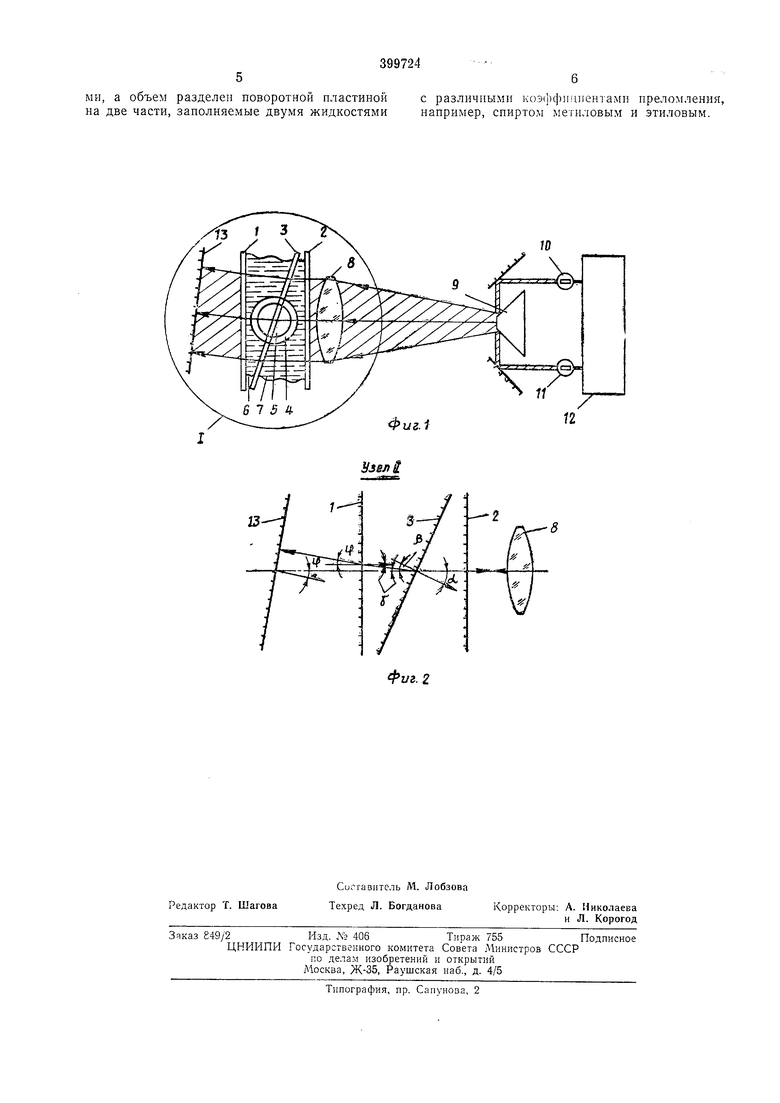
На фиг. 1 изображена оптическая схема предлагаемого автоколлиматора; на фиг. 2 - узел I на фиг. 1.
Автоколлиматор содержит иеподвижпые стеклянные пластины 1 и 2, подвижную стеклянную пластину 3, датчик угла поворота подвижной пластины 4, двигатель отработки 5, сильфопы 6 и 7, заполнеиные жидкостью, объектив 8, неподвижную анализирующую призму 9 со светящейся фаской, фотоириемник; 10, 11 с электронным блоком 12 и измеряемый объект 13.
Работает предлагаемый ав1-окол.1иматор следующим образом.
Световой поток, вы.ходящий из фаски пеподвижпой анализирующей призмы 9, проходит через объектив 8, неподвижную стеклянную пластину 2, слой жидкости с показателем преломления Пь подвижную стеклянную пластину 3, слой жидкости с показателем преломления п-2, ненодвижную стеклянную пластину 1 и, отразивщись от объекта 3, снова проходит через пеподвижпую пластину 1, слой жидкости с показателем преломлепия /12, подвижную пластину 3, слой жидкости с показателем преломления П, неподвижную пластину 2, объектив 8 и собирается в фокальной плоскости последнего. В случае, если объект повернут на некоторый угол, то световые потоки, нопадаюние па разделительные грани анализирующей призмы 9, я, значит, и на фотоприемники 10 и 11, не будут pariiibi, и в электронном блоке 12 ио;пи1тся сигнал |)ассогласоваиия.
Уравнивание световых потоков, гюнадаюпшх па фотоприе.мники, достигается з предлагаемом устройстве за счет создания двух жидкостных клиньев (между подаияиюй и неподвижпыми пластинами) путем поворота подвижной пластины 3. При 5том, вследствие того, что верщины жидкостных клиньев направлены в противоположпые стороны, а коэффициепты преломления жидкостей различны, создается результирующий «оптический клин, величина отклонения лучей которым во много раз меньще величины угла поворота п.Г:астины 3. Для нахождения зависимости между этими величинами рассмотрим чертеж (фиг. 2).
По закону преломления.
sin а
JTj
«I
откуда
ni
sin
sin a;
n.j
,3 : arcsln f - sin a
.«
f (. - arcsin (- sin a
Далее
sin 7 Лв
sin уni
10 откуда
Sin (p - Sin Y,
где Лв - показатель преломления воздуха.
л.
arcsin
arcsin f sin а
sin
л.
п
При малых углах ф и а, учи1ывая, что , имеем ф а (th-п) или
а г
tit - ni
Из последней формулы следует, что для отслеживания углового положения объекта, необходимо повернуть подвижную пластину на
угол в - раз больщий угла поворота объ«2- 1 Jг
екта. Путем подбора жидкостей можно добиться значительной величины соотнощения между угловым перемещепием подвижной пластины и объекта.
Например, при использовании в качестве наполнителей спирта этилового (,36) и спирта метилового (,33) получаем
.- 30
Т. е. а :
а
0,03
Таки.м образом, в качестве датчика угла поворота 4 подвижной пластины 3 может быть применен грубый, и следовательно, мз логабаритный и простой по конструкции дат
1
чик, точность которого в
раз ниже пе
«а-«I
обходимой точности измерения углового положения объекта.
Предмет изобретения
Автоколлиматор для измерения угловых перемещений объекта, содержащий объектив, анализирующую призму со светящейся фаской, расположенную за объективом, датчик угла поворота, двигатель отработки и фотоприемники с электропным блоком, о т л и ч аю и; и и с я тем, что, с целью повышения точности измерения, он снабжен тремя установленными перед объективом плоскопараллельными стеклянными пластинами, две из которых неподвижны и параллельны между собой,
а третья расположена между ними с возможностью поворота относительно перпендикулярной плоскости измерения оси и кинематически связана с датчиком угла поворота и двигателем отработки, и сильфонами, торцы
которых образованы неподвижпы.ми пластина
ми, а объем разделен поворотной пластиной на две части, заполняемые двумя жидкостями
6
с различными коэффициентами преломления, например, спиртом метиловым и этиловым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоколлиматор | 1984 |
|
SU1174886A1 |
| Способ фокусировки телескопического объектива и устройство для его осуществления | 1990 |
|
SU1760423A1 |
| Устройство для измерения взаимного углового положения объектов | 1976 |
|
SU679791A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОВОРОТА ОБЪЕКТА | 2011 |
|
RU2471148C1 |
| АВТОКОЛЛИМАТОР\ | 1973 |
|
SU433454A1 |
| Оптико-электронное устройство для контроля положения объекта | 1985 |
|
SU1307230A1 |
| АВТОКОЛЛИМАТОР | 1970 |
|
SU287329A1 |
| Автоколлиматор | 1979 |
|
SU993013A1 |
| Оптико-электронный автоколлиматор | 1978 |
|
SU777412A1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
13
/
П
.i
Узел1
Фг/г. г
