1
Изобретение относится к измерительной технике и станкостроению и может быть применено в металлорежущих станках с программным управлением, а также в других автоматических системах управления в качестве датчика обратной связи.
Известны датчики перемещений, содержащие плоскую короткозамкнутую обмотку, нанесенную на диэлектрической основе в виде проводящих линий. Относительно этой обмотки перемещаются плоские индикаторные обмотки, сдвинутые одна относительно другой на четверть щага и состоящие из ряда секций.
Однако для этих датчиков требуется высокостабилизированное напряжение и сложная электронная отсчетная схема. Кроме того, обмотка их измерительной линейки должна быть соединена с измерительной схемой. Это осложняет работу устройства при больщих перемещениях органов станка (например, порядка нескольких метров), так как требует наличия скользящих контактов или других конструктивных усложнений, что снижает надежность и уменьшает скорость перемещения линейки.
Цель изобретения - создать датчик перемещений, нечувствительный к колебаниям питающего напряжения, имеющий несложную электронную схему, а также исключить гальваническую связь измерительной линейки с источником питания обмоток и увеличить надежность и быстродействие устройств, работающих с датчиком.
Для осуществления этого индикаторная обмотка выполнена в виде трех секционированных обмоток, выходы секций которых соединены с оммическими сопротивлениями и образуют ряд соединенных последовательно звеньев фазовращателя. Входы обмоток индикаторной
линейки соединены с источником опорного напряжения. При перемещении индикаторной линейки относительно измерительной на шаг фаза сигнала на выходе каждой из трех обмоток меняется на 360°. Эти обмотки соединены
с логической схемой, снимающей сигнал только с одной из двух обмоток и использующей фазу сигнала третьей обмотки для определения момента переключения первых двух обмоток. Это обеспечивает изменение фазы сигнала на выходе датчика от О до 360° при перемещении индикаторной линейки на половину шага. Далее обмотки переключаются, и при перемещении еще на половину щага на выходе устройства опять происходит плавное изменение
фазы от О до 360°.
Такое выполнение датчика дает возможность исключить контакты (гальваническую связь) измерительной линейки с электрической схемой датчика. Это преимущество можно использовать, если индикаторную линейку
выполнить неподвижной, а измерительную линейку- связанной с подвижными органами станков, перемещение которых необходимо измерить.
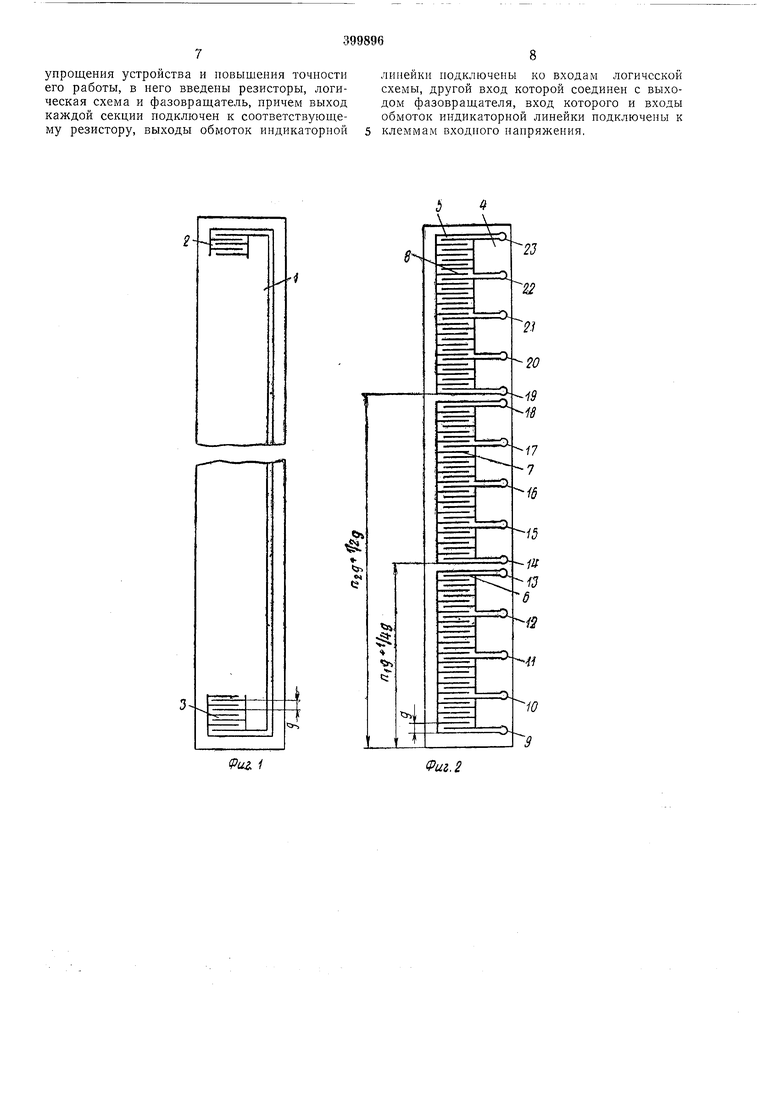
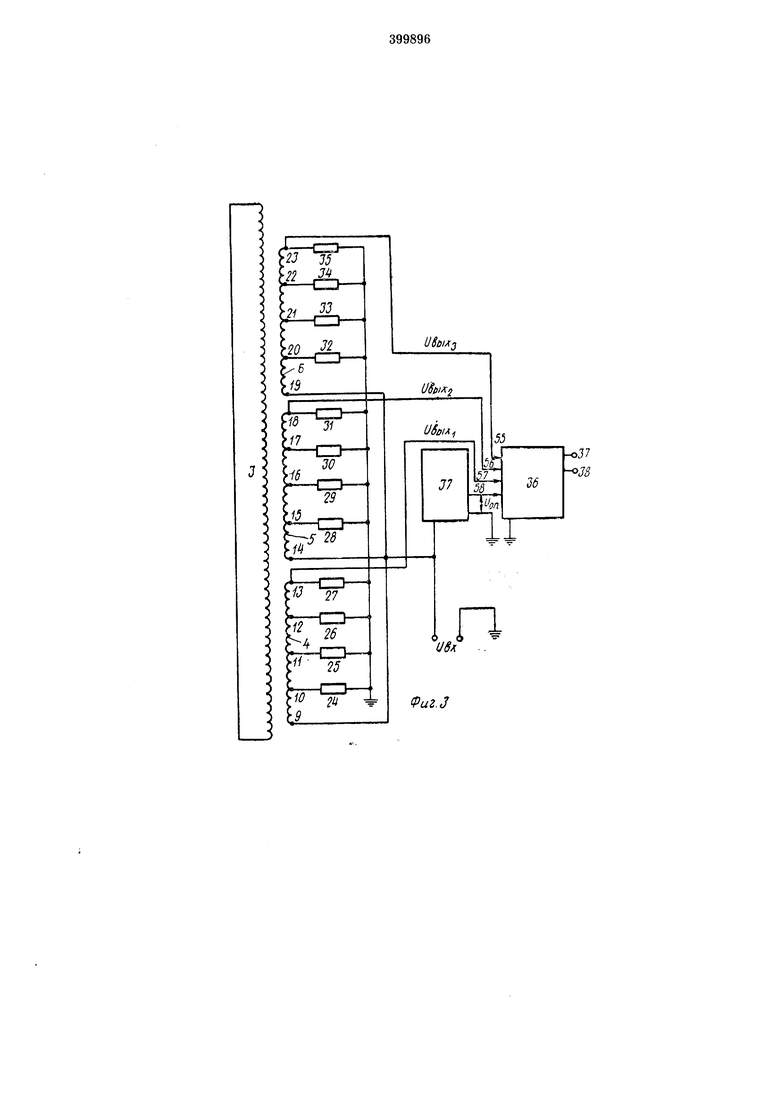
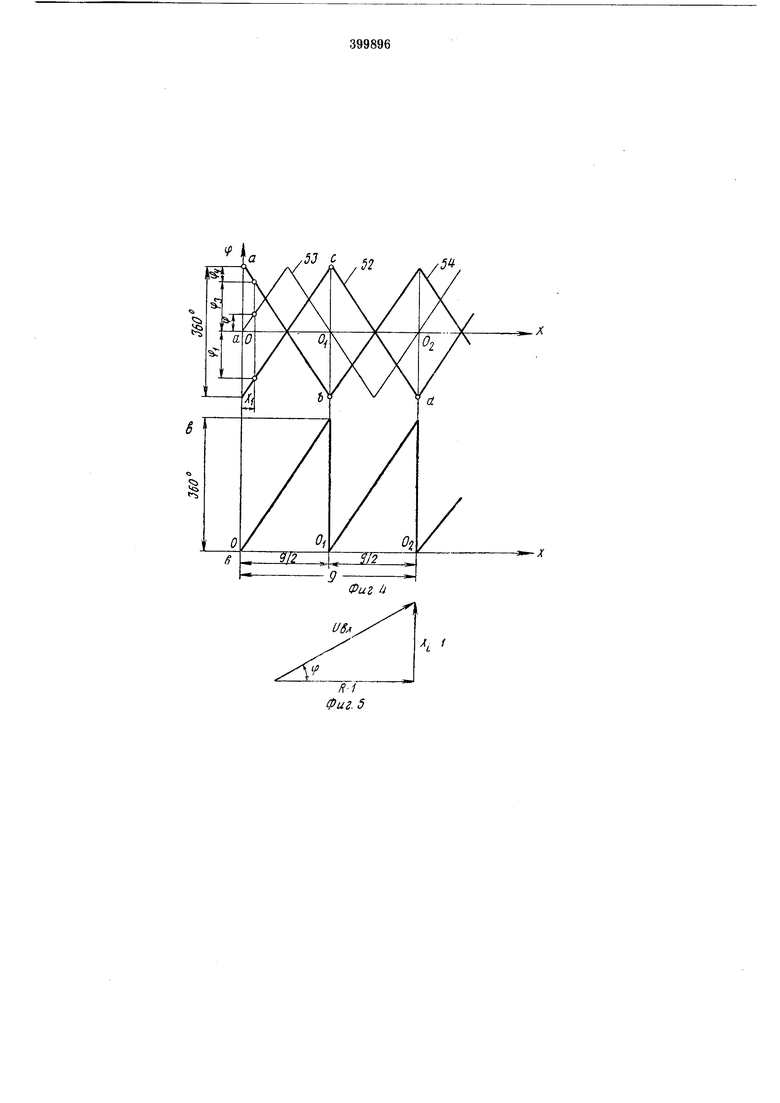
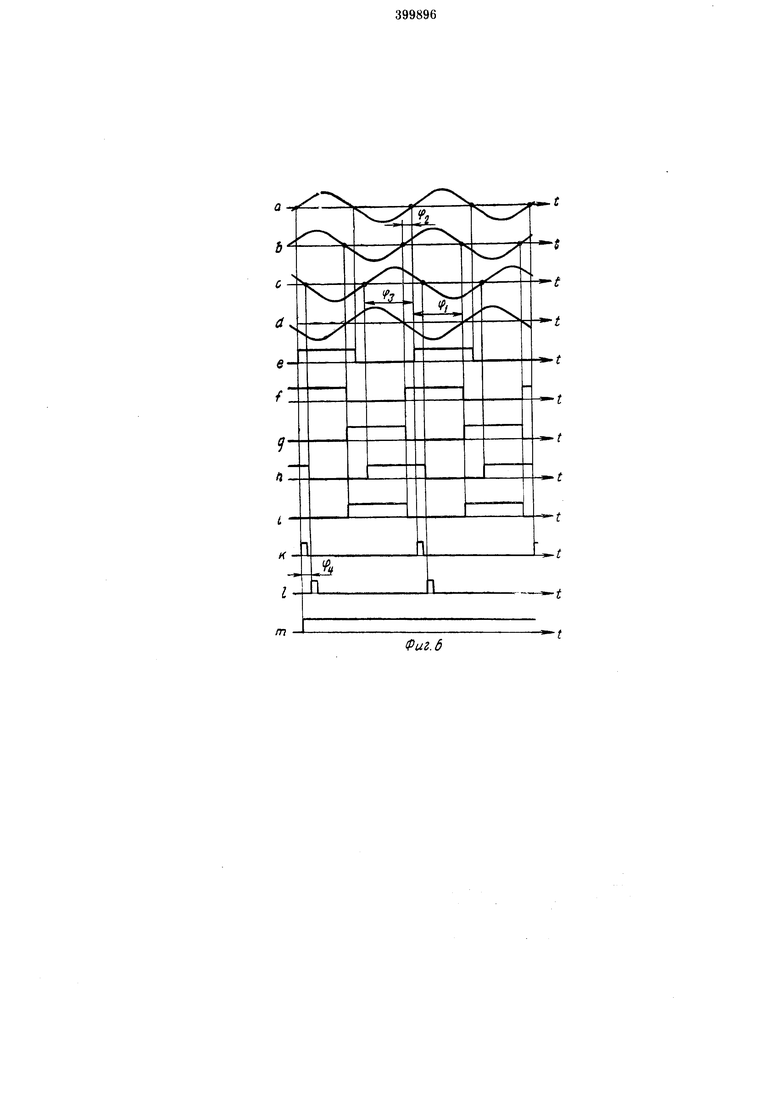
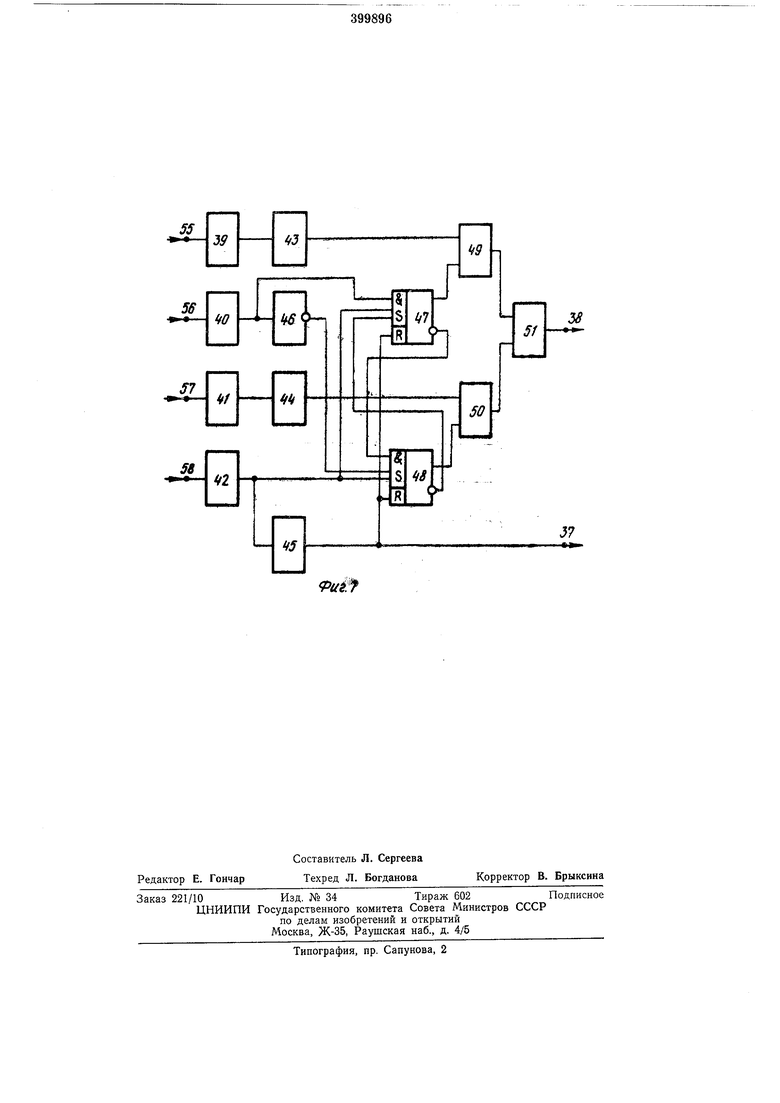
На фиг. 1 изображена измерительная линейка датчика; на фиг. 2 - индикаторная линейка; на фиг. 3 - нриведеиа блок-схема, в которой показано соединение обмоток и все узлы датчика; на фиг. 4 - зависимость фазы сигнала на выходе обмоток индикаторной линейки датчика от перемещения; на фиг. 5 - векторная диаграмма для одной секции любой из обмоток индикаторной линейки, поясняющая возникновение фазового угла между входным и выходным напряжением; на фиг. 6 - временные диаграммы, поясняющие работу логического устройства; на фиг. 7 - развернутая схема логического устройства.
Датчик состоит из неподвижной измерительной линейки 1 (фнг. 1), выполненной в виде диэлектрической основы 2 с нанесенной на ней в виде проводящих линий, следующих с щагом g, обмоткой 3 (вход и выход которой соединены проводящей линией) подвижной индикаторной лннейкн 4 {фиг. 2). На изоляционной основе 5 этой линейки нанесены три обмотки 6, 7 и 8, проводящие линии которых следуют с щагом g. Обмотка 7 сдвинута на 1/4 g, а обмотка 8 сдвинута на 1/2 g относительно обыоткн С, что Л10Ж11о выразнть как «ig+l/4g и n2g+l/2g соответственно, где ni и 2 - целые числа. Каждая из обмоток состоит из последовательных секций, имеющих каждая по пять выводов (ответвлений).
Обмотка 6 имеет выводы с 9 по 13, обмотка 7 -с 14 по 18, обмотка 8 -с 19 по 23.
К этим выводам присоединены сопротивления 24-27, 28-31 и 32-35 соответственно (фиг. 3). Таким образом, к выходу каждой секции присоединено сопротивление. Последовательно соединенная индуктивность и сопротивление представляют звено фазовращателя. Таким образом, все обмотки с подключенными к ним сопротивлениями образуют каждая по четыре соединенных последовательно звена фазовращателя. Ко входам обмоток (9, 14 и 19 фиг. 3) подключено входное напряжение UB-H, которое подается также и на вход фазовращателя. Выходы обмоток (13, 18 и 23 фиг. 3), с которых снимаются напряжения t/выхь t/Bbix2 И (7выхз. соединены со входами логического устройства 36, один из входов которого соединен также с выходом фазовращателя 37. На выходы логического устройства 37 и 38 выдаются опорные импульсы и измерительные импульсы, несущие информацию об измеряемом перемещении.
На фиг. 7 представлено логическое устройство 36 в развернутом виде. Оно состоит из триггеров Шмидта 39-42, формирователей 43-45, инвертора 46, триггеров 47 и 48, схем совпадения 49 и 50 и схемы сборки 51.
Датчик работает следующим образом.
В начальном положении, когда линейки 1 и 4 одна относительно другой неподвижны, через обмотки 6, 7 и 8 линейки 4 протекает ток J. величина которого на выходах 13, 18 и 23 об.моток (фиг. 3) зависит от индуктивности обмоток, которая в свою очередь зависит от величины магнитной связи MI, Мг и Мз между короткозамкнутой обмоткой 3 линейки 1 и обмотками 6, 7 и 8 линейки 4. Величина магнитной связи зависит от взаи.много положения линеек и меняется при перемещении от некоторой мини.малыюй до некоторой максимальной величины.
Рассмотрим вращение фазы на пример обмотки 6. Ток, протекая через первую секцию обмотки и соединенное с ней последовательно
сопротивление 24, вызывает падение напряжения Az,-/ и R-1 соответственно на индуктивности секции и на омическом сопротивлении 24, подсоединенном к выходу 10 этой секции. Здесь XL -ф1.-реактивная составляющая соиротивления звена фазовращателя, L - индуктивность секции, зависящая от магнитной связи Mi, а ш - циклическая частота входного напряжепня t/nx- Напряжение на выходе 10 звена фазовращателя можно выразить как разность векторов t/Bx и (). Это изображено на векторной диаграмме (фиг. 5). Как видно из диаграммы, наиряжение на выходе звена фазовращателя отстает по фазе от входного напряжения t/ax на угол ф. Фаза нанряжеПИЯ, снимаемого с выхода одного фазовращательного звена, может изменяться от О до 90 электрических градусов при изменении индуктивности сектора от нуля до бесконечности. Как видно (фиг. 5),
X, IcuL
cp arctg- -z:iarctg-.
при этом полагается, что сопротивление представляет сумму омического сопротивления проводки самой секции и внешнего сопротивления 24. Как видно из формулы, фаза ф выходного напряжения не зависит от амплитуды входного напрял ения.
Данная зависимость для ф обладает дастаточной линейностью только для небольших изменений индуктивности. Чтобы получить линейную зависимость для всего диапазона изменений индуктивности, величину R для каждого звена выбирают таковым, чтобы максимальный фазовый угол ф соответствовал достаточно линейному участку этой зависимости. На выходе 13 обмотки (при равенстве величин индуктивности каждой секции и сопротивлений 24, 25, 26, 27) фаза сигнала будет сдвинута на величину Пф, где п - количество звеньев фазовращателя. Имеется в виду, что эти рассуждения применимы и к обмоткам
7и 8. Предположим, что в данном исходном положении линеек сигнал на выходе 13 обмотки 6 отстает, а сигнал иа выходе 23 обмотки
8опережает сигнал на выходе 18 обмотки 7 на 180°. При этом фазовращатель 37 настроен так, что в исходном положении фаза сигнала /УОП на его выходе совпадает с фазой сигналя
на выходе 18 секции 7. Предположим, что количество секций обмоток 6, 7 и 8 (которое на фиг. 2 и фиг. 3 чисто условно принято равным четырем), а также величина внешних сопротивлений, подсоединенных к их выходам, выбраны таковыми, чтобы при перемещении индикаторной линейки на половину шага (g/2) фаза сигналов на выходах обмоток изменялась бы на 360° относительно напряжения /оп. При данном пространственном смешении обмоток это будет описано с помощью графиков 52, 53, и 54 (фиг. 4 а). Логическое устройство датчика работает таким образом, что для определения перемещения используются только нисходящие ветви ав и cd графиков 52 и 54, соответствующие сигналам (/вых1 и /выхз, а сигнал пмх2 (график 53 на фиг. 4,а) используется для определения того, с какой из двух обмоток 6 и 8 должны сниматься данные о перемещении, которые затем выдаются на выход 38 логического устройства 36 в виде смещения фазы имнульсов на этом выходе относительно опорных импульсов на выходе 37. В том случае, когда сигнал на выходе обмотки 7 («выхг) опережает по фазе сигнал Uou (участок 00 на фиг. 4,а), фаза импульсов на выходе 38 определяется по фазе сигнала бвыхз (участок ав графика 54 и участок OOi на фиг. 4,8), а когда сигнал Пвыхз отстает от сигнала f/on (участок Oi02 на фиг. 4,а) то фаза импульсов на выходе 38 (фиг. 3) огфеделяется по фазе сигнала t/Buxi (участок cd графика 52 и участок Oi02 на фиг. 4, б). При этом перемещению па g/2 соответствует изменение фазы выходного сигнала на 360° (фиг. 4,в).
Рассмотрим работу логического устройства 36 при некотором смещении Xi индикаторной линейки (фиг. 4,а) относительно измерительной. Этому смещению соответствуют значения магнитной связи , Aiy и Л4з, отличные от величин связи в исходном ло.яожении. При этом сигналы /пых2 и 17выхз опережают по фя.зе сигнал {7опнаф2Ифз соответственно (фиг. 4,а), а сигнал f/Buxi отстает от него по фазе на геличину фазового угла rp|. Смещению Х- соответствуют временные диаграммгз этих сигналов, (фиг. 6а, d, в и с), изображенные с одинаковыми амплитудами. Эти сигналы через входы 55, 56, 57 и 58 (фиг. 3 и 7) логического устройства поступают на входы триггеров Шмидта 39, 40, 4l и 42 (фиг. 7), на выходе которых формируются пря.моугольные сигналы (фиг. Qh, f, i и I соответственно). На выходе триггера Шмидта 40 подключен инвертор 46, выдающий прямоугольный сигнал (фиг. 6g). Сигналы с этого триггера и инвертора подаются на входы S запуска триггеров 47 и 48 соответственно. Как видим (фиг. 7), запуск триггера 47 возможен при совпадении сигнала с триггера 40 с сигналом на выходе триггера 42 при незапушенном триггере 48, нулевое плечо которого соединено с тем же входом 5 триггера 47. Запуск триггера 48 возможен при совпадении сигналов с инвертора 46 и с триггера Шмидта 42, а также при отсутствии запрещающего сигнала с выхода нулевого плеча
триггера 47. Поэтому при смещениях, соответствующих участку 60| (что действительно и для смещения Xi), когда сигнал (7вых2 опережает сигнал f/on в самом начале периода сигнала Uou происходит совпадение сигналов с триггеров Шмидта 40 и 42, срабатывает триггер 47 и запрещает запуск триггера 48. От переднего фронта сигнала с триггера 42 с помощью формирователя 45 формируются
прямоугольные импульсы (фиг. 6), которые выдаются на выход 37 (фиг. 3 и 7) как опорные импульсы, а также для сброса триггеров 47 и 48 через входы R в нуль. При этом в нуль сбрасывается только тот триггер, который
в данный мо.мент не устанавливается в единицу. От заднего фронта импульсов с триггеров Шмидта 39 и 41 формируются короткие импульсы, которые через схемы совпадения 49 и 50 и схему сборки 51 выдаются на выход 38
(фиг. 3 и 7) как измерительные импульсы. При смещении Xi схема совпадения 49 открыта разрешающими сигналами (фиг. 6,т) сединичного плеча триггера 47, а схема 50 закрыта, поэтому сигнал со схемы совпадения 49
(фиг. 6) на выходе 38 соответствует заднему
фронту сигнала с триггера Шмидта 39, а фаза
Ф4 импульсов со схемы сов-падепия 49 (фиг.4,а
и 6) пропорциональна перемещению Xi.
При увеличении перемещения до величины
. фаза фз сигнала /г.ыхз будет меняться по закону, соответствующему участку графика ав (фиг. 4а), а фаза ф., измерительного импульса будет меняться но закону, соответствующему участку OOi графика 4ff. При смещениях сигнал L,,,,iv2 отстает от сигнала Lon и поэтому в начале нериода сигнала Uon происходит совпадение сигналов с выхода инвертора 46 и триггера Шмидта 42. Поскольку совпадения сигналов с триггеров
Шмидта 40 и 42 в начале периода нет, то триггер 47 гасится импульсами с формирователя 45, а триггер 48 запускается через вход S, упомянутым совпадением импульсов. На выход 38 через схему совпадения 50 и схему
сборки 51 выдаются импульсы с выхода формирователя 44. При изменении фазы сигнала t/Bbixi по закону, соответствуюнему участку cd графика 52 (фиг. 4а), фаза измерительного импульса будет меняться по закону, соответствующему участку OiOj (фиг. 4,о).
Очевидно, что изменение в некоторых пределах амплитуды питающего напряжения не будет влиять на точность работ1л датчика, поскольку это почти не влияет на точность работы триггеров Шмтьчта.
П р е д м е т и з о б р с т с и п я
Индуксивный фазовый датчик перемещений, содержащий измерительную линейку с нанесенной на пей короткозамкнутой обмоткой и индикаторную линейку с нанесенными на ней несколькими обмотками, сдвинутыми одна относительно другой и выполненными в виде ряда секций, отличающийся тем, что, с целью
упрощения устройства и повышения точности его работы, в него введены резисторы, логическая схема и фазовращатель, причем выход каждой секции подключен к соответствующему резистору, выходы обмоток индикаторной
линейки подключены ко входам логической схемы, другой вход которой соединен с выходом фазовращателя, вход которого и входы обмоток индикаторной линейки подключены к клеммам входного напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прямого преобразования фазы сигнала в код | 1977 |
|
SU687580A1 |
| Датчик линейных перемещений | 1985 |
|
SU1303811A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 1973 |
|
SU368595A1 |
| Устройство для измерения удельной электропроводности | 1982 |
|
SU1070464A1 |
| Устройство для измерения мощности генератора электротермической установки | 1981 |
|
SU1095086A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1784836A1 |
| УСТРОЙСТВО для ИНТЕРПОЛИРОВАНИЯ РАСТРОВОГО ШАГА | 1973 |
|
SU406114A1 |
| Устройство для спуска и подъема колонны труб | 1979 |
|
SU1134693A1 |
| Преобразователь перемещение-фаза | 1991 |
|
SU1827525A1 |
| Датчик числа оборотов | 1983 |
|
SU1081546A1 |
Щ
2
Фиг.З
в/
t
56
«5
40
57
«/
tfii
58
V2
45
t
«7
5S
a
51
50
L/
fi8
aj
J7
