1
Изобретение относится к области геофизических исследований.
Методы акустического каротажа все шире внедряются в практи1ку геофизических исследований скважин, при этом наибольшее распространение получила аппаратура непрерывного акустического каротажа, которая обладает лучшими производственны-мн возможностями.
Однако при детальном изучении поглощаюШ;их свойств реальных сред по методам Берзон, Васильева, Облогиной или определении упругих постоянных горных пород необходима точечная запись амплитудных кривых, неискаженная регистрация всех типов волн, построение годографов в интересуюш,ем резрезе горных пород. При подобных исследованиях необходимо изменение расстояния между излучателем и приемником.
Известны установки с точечной записью, в которых применяются центрированные или прижимные приборы с конечным числом точек наблюдения (), а изменение базы измерения происходит за счет переключения выхода приемников, жестко устанавливаемых на различных расстояниях от излучателя. Дискретность наблюдения понижает точность информации, а применение для каждой точки наблюдения определенного датчика требует постоянной калибровки его.
Цель изобретения-обеспечение возможно
сти получения непрерывных годографов ра
личных типов волн в скважине, их амплитуд
ных графиков и повышение точности регистрации акустических параметров.
Это достигается тем, что предлагаемый ультразвуковой зонд снабжен приводом и механизмом для изменения базы измерения, связанным с одним из преобразователей посредством эластичной связи, например тканевым ремнем, выполненным из материала, имеющего скорость распространения звука, не превышающую скорость звука в буровом растворе. Использование одного датчика при наблюдении но всей длине изменения базы в отлИчие от многоканального зонда снижает возможность появления случайных ошибок.
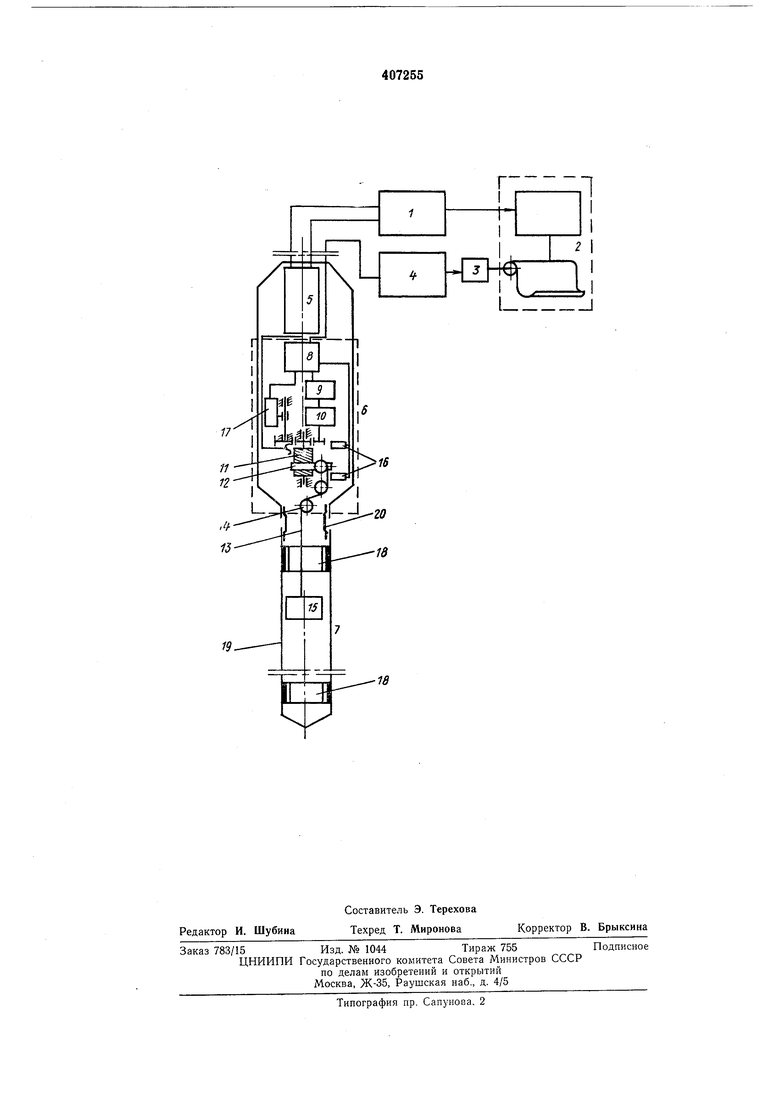
На чертеже показана схема устройства, вклю чающего описываемый зонд.
Устройство акустического каротажа состоит из наземной аппаратуры, включающей усилитель 1, регистратор 2, привод 3 регистратора, пульт управления 4 инглубинного прибора, включающего электронную схему 5, механизм
6 изменения базы, акустический зонд 7. Механизм 6 изменения базы состоит из блока управления 8, электродвигателя 9, редуктора 10, барабана 11, укладчика 12, эластичной связи 13, на которой через систему роликов 14 подвешен подвижный преобразователь Г5, конечных включателей с жестким и улорами 16, омического датчика 17, подвижной Д|БИЖО|К которого связан механически с электродвигателем 9.
Акустический зонд 7 состоит из неподвижных преобразователей 18, герметичного корпуса 19 зонда, выполненного из материала с большим затуханием и малой скоростью звука (например винипласт, фторопласт), компенсатора 20 гидростатического давления бурового раствора. При этом звуковая энергия распространяется по /корпусу зонда, ослабевает и приходит позднее волн из породы. Полезные волны, проходящие из породы через стевку корпуса зонда на подвижный преобразователь, затухают незначительно вследствие небольшой толшины стенки корпуса. Применение герметичного корпуса изолирует зону перемещения датчика от попадания посторанних предметов.
Устройство работает следующим образом.
Команда с пульта управления 4 наземной аппаратуры подается на включение привода 3 регистратора и на блок управления 8 глубинного прибора, который производит включение, реверсирование и останов ку электродвигателя 9. Электродвигатель 9 через редуктор 10 вращает барабан 11 с винтовой спиралью на его поверхности. При вращении барабана 11 происходит наматывание на него или сматывание с него кабеля 13, на котором подвешен подвижный преобразователь 15. Укладку кабеля производит укладчик 12 через систему роликов 14, приемник (преобразователь 15) движется в корпусе 19, который служит для него направляющим. Конечные выключатели с жесткими упорами 16 останавливают приемник в крайних положениях, которые являются контрольными точками положения приемника. Контроль за положением подвижного приемника в промежуточных положениях между конечными точками осуществляется 0;мическим датчиком 17.
Величиной сопротивления датчика 17, пропорциональной передвижению передвижного преобразователя 15, регулируется синхронность работы двигателя привода 3 регистратора с перемещением преобразователя 15, чем обеспечивается линейность изменения базы и перемещения регистрирующей ленты.
Предмет изобретения
Окважинный ультразвуковой зонд, содержащий ультразвуковые преобразователи, размещенные в корпусе, отличающийся тем, что, с целью получения непрерывных годографов различных типов волн в скважине,
их амплитудных графвков и повышения точности регистрации акустических параметров, он снабжен механизмом изменения базы измерения, связанным с одним из преобразователей посредством эластичной
связи, например тканевым ремнем, выполненным из материала, имеющего скорость распространения звука, не превышающую скорость звука в буровом растворе.
19
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА СКВАЖИН | 1969 |
|
SU234283A1 |
| Скважинный прибор акустического каротажа | 1989 |
|
SU1700509A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА | 1971 |
|
SU426214A1 |
| Ультразвуковой импульсный способ исследования буровых скважин и устройство для его осуществления | 1974 |
|
SU603933A1 |
| УСТРОЙСТВО ДЛЯ АКУСТИЧЕСКОГО КАРОТАЖА СКВАЖИН | 1973 |
|
SU399815A1 |
| Скважинный зонд каротажной аппаратуры | 1975 |
|
SU765771A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ НАКЛОНА АКУСТИЧЕСКИХ ОТРАЖАЮЩИХ ГРАНИЦ | 1966 |
|
SU187336A1 |
| Способ акустического каротажа скважин | 1981 |
|
SU1187126A1 |
| Акустическое устройство для исследования околоскважинного пространства | 1979 |
|
SU911410A1 |
| Способ акустического каротажа | 1981 |
|
SU972442A1 |