1
Изобретение отиоситсй к области электроизмерительиой техинки и может быть иеиользовано для обесиечения возножиости выбора различных функций коррекции и увеличения быстродействия нри коррекции иелииейностн частотных датчиков.
Известиый сиособ
коррекции иелииеииостн осиоваипый на фуикциочастотных датчиков, одиого из параметров нальиом измеиеиии цеии датчика, не обеспечастотно-зависимойвыбора различных функчивает возможности ций коррекции и характеризуется пониженным быстродействием.
По иредложеиному снособу выходную частоту датчика преобразуют в изменение скважности импульсов той же частоты, управляющих относительной длительностью подключения к одному из элементов частотно-зависимой цепи дополнительного элеме)1та, воздействуюидего на частоту датчика.
Это позво.тяет обеспечить возможность выбора различпых функций коррекции и увеличить быстродействие при коррекции нелинейности частотных датчиков.
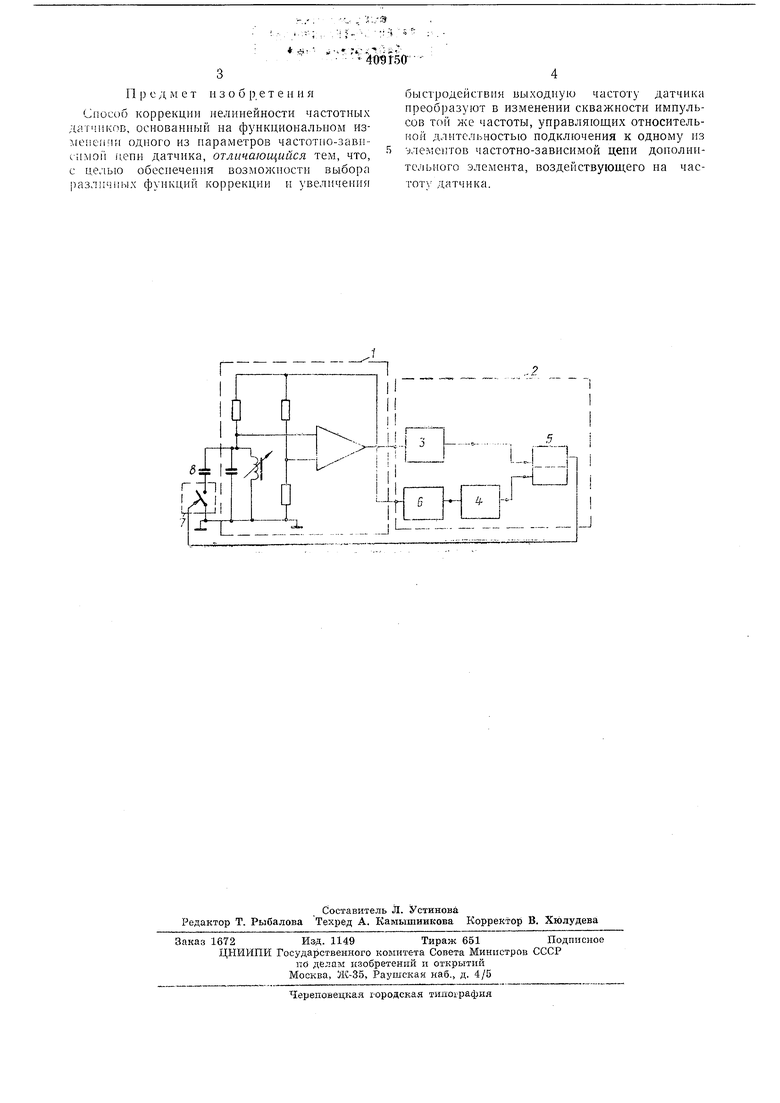
Ма чертеже ноказаиа блок-схема устройства для осуществлеиия способа.
Устройство состоит из частотного датчика /, представляющего собой автогенератор с параллельным LC-контуром, индуктивность катушки которого иснользуется в качестве первичного преобразователя неремещения в частоту, преобразователя 2 частоты в скважность нмиульсов, образованного формирователями 3, 4, триггером 5 и фазовращателем 6, ключа 7 и дополнительной емкости 8.
Устройство работает следующим образом.
При изменении величины неремещения изменяется индуктивность, а следовате.льно, и частота
/
где о - зазор магнитной снстемы инд}ктивного датчика.
Увеличеиие зазора вызывает увеличение частоты, которое приводит к уменьшению угла сдвига фаз .между напряжениями с выхода датчнка / н фазовращателя 6.
С уменьшением угла сдвига фаз уменьшается сквал ;ность импульсов напряжения на выходе триггера, что соответствует меиьшему относительному времени подключения дополнительной емкости к контуру, т. е. эквивалентному уменьшению суммарной емкости коитура. Вследствие этого погрешность линейности уменьшается, а чувствительность увеличивается. Цепь коррекции не ухудщает быстродействия устройства.
П р о д м е т и 3 о б р. е т е U и я
Способ коррекции нелинейности частотных датчиков, основанный на функциональном изiieiieiiKi одного из нараметров частотпо-зависимой цепн датчика, отличающийся тем, что, с целью обесиечеиия возможности выбора различных функций коррекции и увеличения
оыстродеиствия выходную частоту датчика иреобразуют в изменении скважности импульсов той же частоты, управляющих относительной длительностью подключения к одному из элементов частотно-зависимой цепи дополнительного элемента, воздействующего па часraiv датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотный датчик с коррекцией нелинейности | 1973 |
|
SU454497A1 |
| Следящий фильтр-демодулятор | 1982 |
|
SU1095358A1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОМПЛЕКСНЫХВЕЛИЧИН | 1972 |
|
SU354355A1 |
| Устройство для коррекции характеристик нелинейных элементов | 1984 |
|
SU1242862A1 |
| Датчик скорости, направления вращения и углового положения вала | 1988 |
|
SU1654972A1 |
| Устройство для автоматической компенсации емкостного тока однофазного замыкания на землю | 1985 |
|
SU1265914A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Устройство для измерения неэлектрических величин | 1987 |
|
SU1490448A1 |
| Устройство для измерения температуры | 1980 |
|
SU907402A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
