Существующие типы фазокомпенсаторов основываются на двух принципах: нужные амплитуда и фаза компенсационного напряжения получаются либо в результате изменения величины элементов комплексного потенциометра, либо в результате поворота катушки во вращающемся магнитном поле низкой частоты.
Оба способа сравнительно просты, однако, имеют существенный недостаток-зависимость от частоты, так как всякое реактивное сопротивление пропорционально частоте. В силу этого при изменении последней (например, в практике электро-акустических измерений) необходимо каждый раз изменять самоиндукцию или какой-нибудь другой параметр компенсатора, что усложняет процесс измерения и может привести к ошибкам.
Существенным недостатком первого упомянутого способа является также невозможность непрерывного изменения фазового угла компенсирующего напряжения от 0° до 360°.
Цель предлагаемого изобретения состоит в устранении перечисленных недостатков.
Сущность способа компенсации фаз, согласно изобретению, заключается
(379)
в том, что получение компенсационног напряжения производится путем детектирования суммы напряжений высокой частоты интерференционного генератора, а сдвиг фаз осуществляется в цепи гетеродина с неизменной частотой.
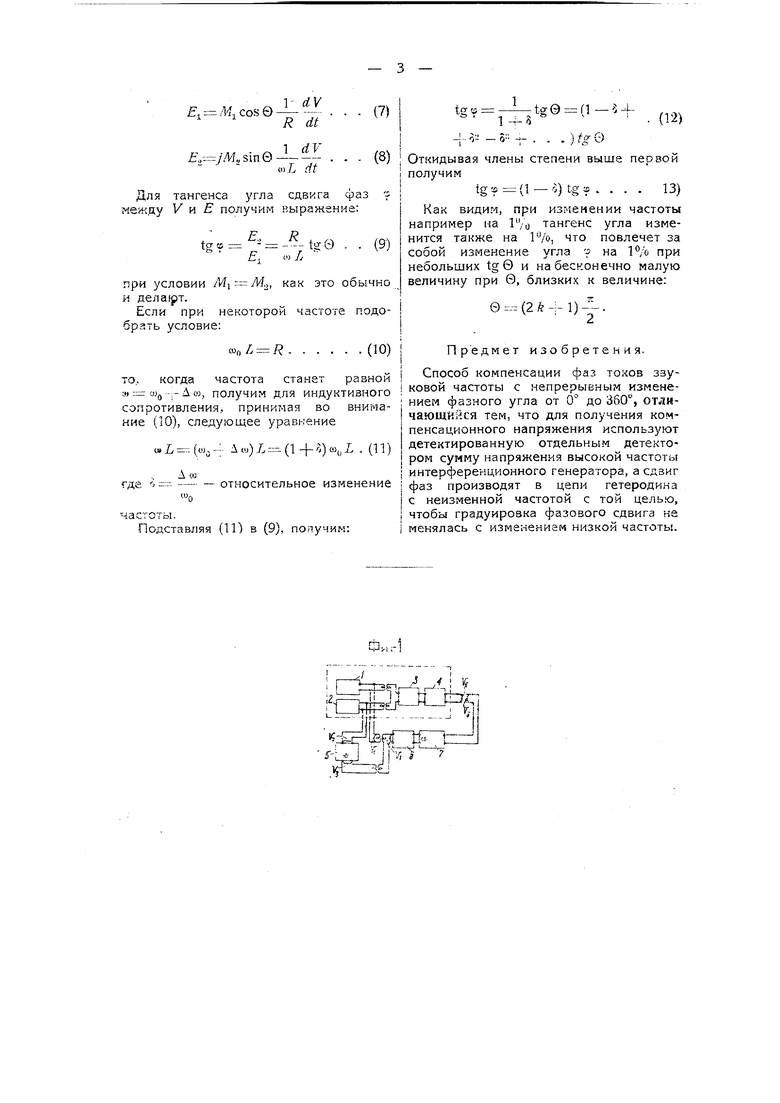
На чертеже фиг. 1 изображает схему способа для компенсации фаз и фиг. 2- схему фазовариатора.
Два гетеродина 1, 2 звукового генератора имеют частоты Q -{- ш и «, где «о-необходимая при данном измерении низкая частота, выделяемая с помощью детектора 3 и усилителя 4. Напряжение Т ., от гетеродина 2 подведено к фазовариатору любой конструкции (предпочтительно с возможностью непрерывного изменения фазы от 0° до 360°), рассчитанного для неизменной частоты ш гетеродина 2. Напряжение Fj, снятое с фазовариатора, складывается с напряжением F частоты to-f-Q, снятым с гетеродина 1.
Суммарное напряжение воздействует на детектор 6 компенсатора и затем усиливается усилителем низкой частоты 7, с которого снимается необходимее для компенсационного измерения напряжение V.
Изменяя при помощи фазоваритора 5
сдвиг фаз между напряжениями V и Кз на угол pi, получаем сдвиг фаз между Fj и Vg на угол з, причем f
Действительно, если имеем два напряжения
Fg Е sin («) if-|- ) F, sin (o) + Q). .
TO складывая их, получаек, как известно, колебания высокой частоты с амплитудой:
Е, . Е + 2 -f 3 cos (91Н- -f).
Если затем суммарное напряжение детектировать, например, на квадратичном участке детекторной характеристики, где, как известно,
получим после удаления несущей частоты ток низкой частоты:
/ 7 F F гпч (/-1-(в (
а 1 3 i т
Как видим, угол ф равен углу сдвига фаз между напряжениями Kj и V, что весьма удобно для измерительных целей.
Необходимо добавить, что то же соотношение между углами сохранится при любом детектировании.
В виду того, что фазовариатор 5 работает на высокой частоте, он может быть сделан весьма компактным (например, два спаренных вариог етра).
Выясним еще одно обстоятельство, именно постоянство фазы напряжения Рц звукового генератора и напряжения F, снятого с фазокомпенсатора.
Изменения фазы этих напряжений (фазовая модуляция), как известно, могут быть вызваны нестабильностью частоты звукового генератора.
Действительно, частота и фаза связаны соотношением
Л0
где Да - приращение частоты, - фаза, откуда для фазы получим выражение
поэтому, поскольку в настоящее время все генераторы не обладают абсолютным постоянством частоты, фазовая модуляция всегда имеет место.
Это, однако, не является недостатком вследствие того, что абсолютная фаза колебаний не имеет практического значения. Действительно, при из.ме рениях вся схема питается от общего источника тока звуковой частоты. Практический смысл имеет лишь стабильность частоты.
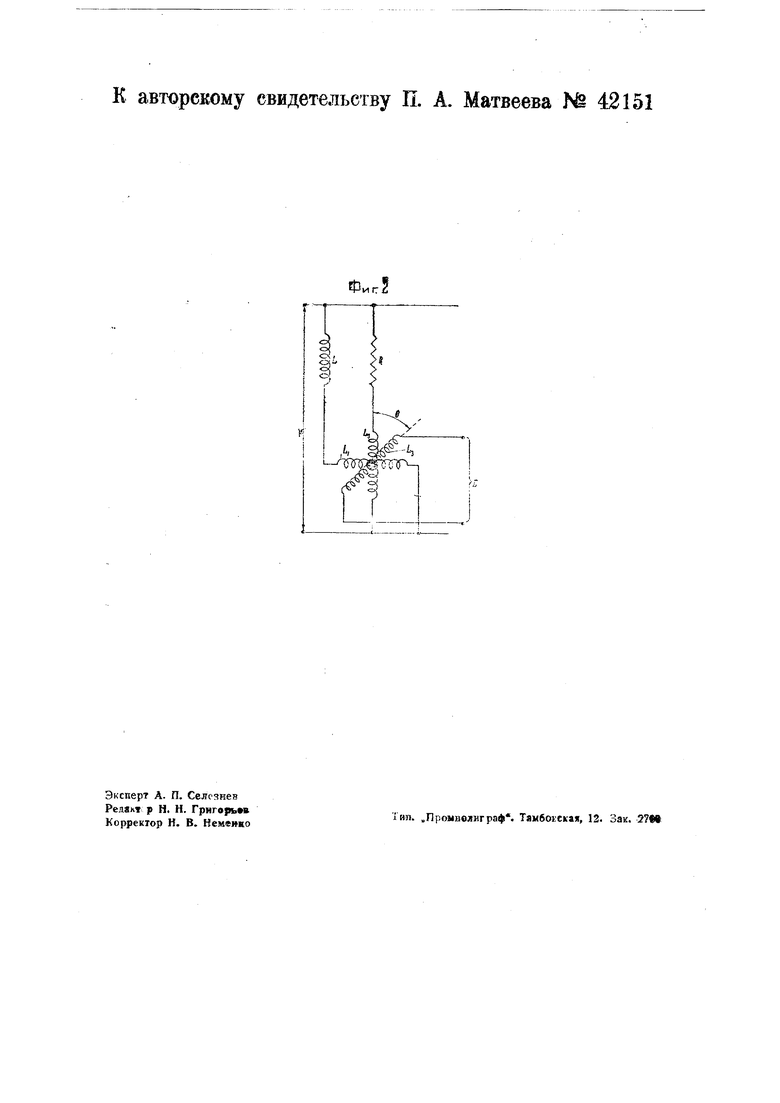
Покажем на примере одного из многочисленных типоз фазовариаторов, каково влияние нестабильности частоты на градуировку угла сдвига фаз.
Положим, что фазовариатор рабо; тает по принципу действия, изображенi ному на фиг. 2. Компенсатор выполнен ; в виде статора из двух взаимно перпендикуляр.ных катушек L и L и зраI щающегося внутри их ротора Aj. { Напряжение //, повернутое на желаемый угол f получается, как сумма i напряжений E и Е., индуктированных I в катушке Л,, катушками /) и L.. I Как легко увидеть (фиг. 2), токи в ка; тушках LI и находятся в квадратуре, I если принять, что
. (1)
(2)
i Для эпектродвижу дих сил Е и Е, получим выражения
Cj---. cosO -
(3) dt
fj /V/ sine- - .... (4) dt
где М и /Wg - максимальные значения I коэфициентоз связи, а 0 - пространственный угол поворота ротора L относительно катушки Ь-. j Токи /; и 4 при условиях (1) и (2) I будут
(5)
(б)
.У-у п L
. Подставляя в (3) и (4) значения для i токов из (5) и (б), получим: A- iCos04r ; ... (7) R dt 1 dV L,,inQ Для тангенса угла сдвига фаз f между V и Е получим выражение; .-tg0 - . (9) с. W L при условии /V/1 .,, как это обычно и делафт. Если при некоторой частоте подобрать условие: ,L R то. когда частота станет равной ;«-. а.о -р Д со, получим ДЛЯ ИНДуКТИВНОГО сопротивления, принимая во внимание (10), следующее уравнение с L . (ок -;- А (о) 7. (1 -f о) О), L . (П) Д« где ::- - - относительное изменение частоты. Подставляя (11) в (9), попучим: (i tg 1-4-5 - . (12) 4-0:; -5 - . . .)tgQ Откидывая члены степени выше первой получим tgf (i-)tg ... 13) Как видим, при изменении частоты например на тангенс угла изменится также на , что повлечет за собой изменение угла -f на Р/о при небольших tg 0 и на бесконечно малую величину при 0, близких к величине: e-(2fe-i-i). Предмет изобретения. Способ компенсации фаз токов звуковой частоты с непрерывным изменением фазного угла от 0 до 360, отличающийся тем, что для получения компенсационного напряжения используют детектированную отдельным детектором сумму напряжения высокой частоты интерференционного генератора, а сдвиг фаз производят в цепи гетеродина с неизменной частотой с той целью, чтобы градуировка фазового сдвига не менялась с изменением низкой частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения многомерных передаточных функций высокочастотных узкополосных нелинейных систем | 1988 |
|
SU1532887A1 |
| Устройство для динамических испытаний материалов | 1940 |
|
SU62471A1 |
| Устройство для автоматического включения синхронных генераторов на параллельную частоту | 1934 |
|
SU45667A1 |
| Электрическое устройство для вращения машин-орудий | 1935 |
|
SU48765A1 |
| Устройство контроля качества точечной сварки | 1984 |
|
SU1226267A1 |
| Устройство для стабильной компенсации искажений в широком диапазоне частот способом противосвязи | 1938 |
|
SU56855A1 |
| Фазометр низких и инфранизких частот | 1982 |
|
SU1075184A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ МОЩНОСТИ:!оюзя-°-^'-^^•^?ПНП-.ТслНл^;::^:^:;:| | 1972 |
|
SU351170A1 |
| Устройство для измерения магнитной проницаемости проводящего образца | 1989 |
|
SU1636819A1 |
| Способ управления вентильным электродвигателем | 1989 |
|
SU1690160A1 |
;r 3rv-4
foib -л1 l . 1 1
JL±
i
lif -lfni i
г ,14-J 1

