1
Изобретение относится к измерительной технике и может быть использовано в системах контроля параметров различных технологических процессов, где требуется преобразовать усилие в электрический сигнал.
Известные устройства для измерения усилий, содержаш,ие силоизмерительные тензорезисторные датчики с упругим элементом, устаноБлеииым на шариковой опоре, и ограничитель деформации, обладают недостаточной чувствительностью.
Цель изобретения - повысить чувствительность устройства.
Для этого оно снабжено упругой опорой в виде круглой пластины с отверстием по середине и стойками с тензорезисторами, установленной на дополнительной шариковой кольцевой опоре, а основная шариковая кольцевая опора размещена на пластине упругой опоры, при этом стойки упругого элемента расположены в отверстии упругой опоры.
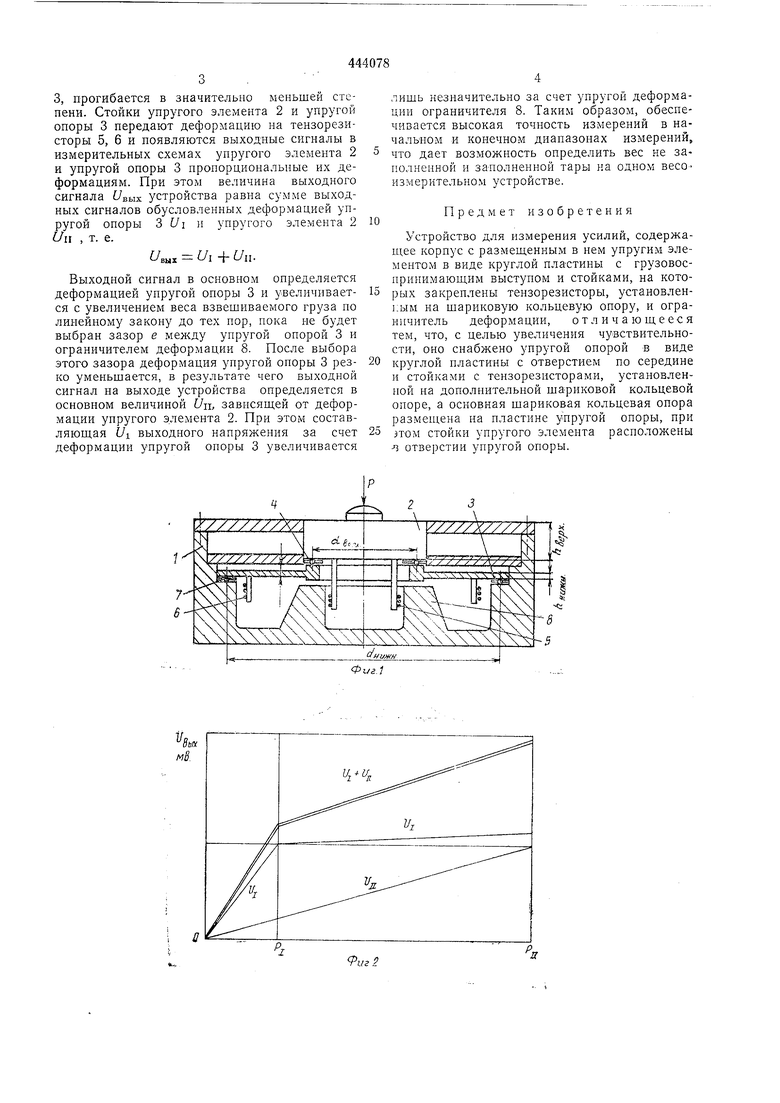
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 дан график зависимости выходных сигналов упругого элемента Uu и упругой опоры Ui от измеряемых усилий Рц и PI.
Устройство для измерения усилий имеет корпус 1, в котором размеш,ен упругий элемент 2, установленный на упругой опоре 3, с помощью кольцевой шариковой опоры 4. На
стойках упругого элемента 2 размещены тензорезисторы 5, соединенные в электрическую схему. Стойки упругого элемента 2 выполнены определенной длины так, что при перемешении
теизорезисторов по длпне стойки вверх или вниз можно обеспечить использование упругого элемента данной толщины Лверх в устройствах на разные номинальные усилия.
Упругую опору 3, выполненную в виде круглой пластины толщиной /гн11ж /гверх с отверстием по середине и стойками с тензорезисторами 6, соединенными в электрическую схему, устанавливают в корпусе 1 на кольцевой шариковой опоре 7, при этом диаметр шариковой опоры dniDK больше диаметра шариковой опоры упругого элемента cfsepx- Под кольцевой шариковой 4 и упругой 3 опорами устанавливают ограничитель деформации 8 упругой опоры.
В иеиагружеином состоянии устройства между упругой опорой 3 и ее ограничителем деформации 8 образуется зазор /. Стойки унругого элемента 2 заходят в отверстие упругой опоры 3 и ее оргаиичителя деформации 8.
При приложении возрастающего измеряемого усилия Р к грузовоспринимающему выступу упругого элемента 2 происходит передача усилия через шариковую кольцевую опору 4 на упругую опору 3. Упругий элемент 2, обладающий больщей жесткостью, чем упругая опора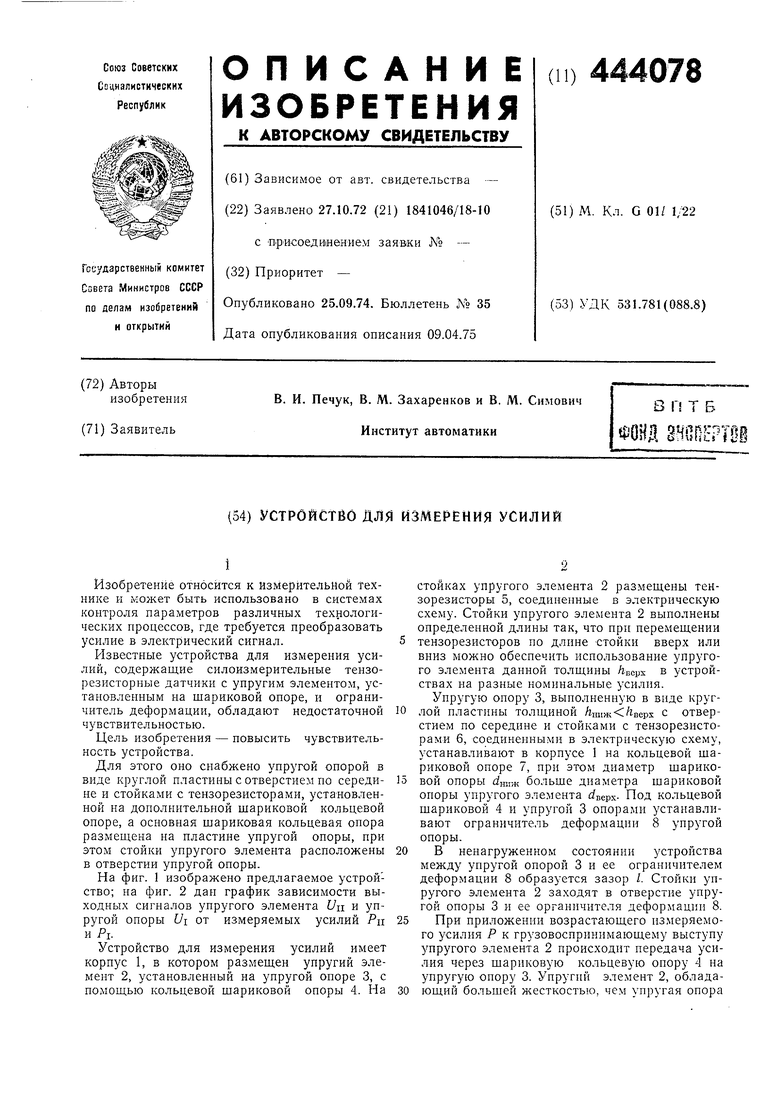
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДАВЛЕНИЯ | 1995 |
|
RU2082128C1 |
| Силоизмерительный датчик | 1972 |
|
SU613218A1 |
| ДАТЧИК КОНТАКТНОГО ДАВЛЕНИЯ | 2004 |
|
RU2293295C2 |
| Силоизмерительный тензорезисторный датчик | 1973 |
|
SU495563A1 |
| Датчик силоизмерительный | 1978 |
|
SU697843A1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2013 |
|
RU2533536C1 |
| СИЛОЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ | 2013 |
|
RU2550312C1 |
| УПРУГИЙ ЭЛЕМЕНТ ТЕНЗОРЕЗИСТОРНОГО ДАТЧИКА СИЛЫ | 2013 |
|
RU2526228C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ ГИБКИХ ОБОЛОЧЕК ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2082082C1 |
| Устройство для изучения влияния адгезивов на ретенцию протезов | 1985 |
|
SU1409223A1 |
