(54) ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитная переключающая муфта | 1991 |
|
SU1784781A1 |
| Электромеханический преобразователь моментного вентильного электродвигателя | 1989 |
|
SU1702493A1 |
| Электромеханический преобразователь бесконтактного тахогенератора постоянного тока | 1989 |
|
SU1767634A1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2008 |
|
RU2375776C1 |
| Поляризованный электромеханический преобразователь для электрочасов | 1979 |
|
SU792211A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ С ЖИДКОСТНЫМ ОХЛАЖДЕНИЕМ | 2010 |
|
RU2422969C1 |
| Электромагнитная переключающая муфта | 1989 |
|
SU1649158A1 |
| Магнитоэлектрический преобразователь | 1979 |
|
SU836733A1 |
| Сверхпроводниковая синхронная электрическая машина с обмотками якоря и возбуждения в неподвижном криостате | 2017 |
|
RU2664716C1 |
| УНИПОЛЯРНАЯ МАШИНА Н.Г.ЕРМИЛОВА | 1991 |
|
RU2031517C1 |
Известны электромеханические преобразователи с уравновешенным якорем, поляризованные постоянным магнитом и имеющие обмотки управления, обхватывающие якорь.
Такие преобразователи имеют значительную электрическую постоянную времени катушек.
Преобразователи с обмотками на магнитопроводах требуют вдвое больщей мощности управления по сравнению с преобразователями с обмотками на якоре. Кроме того, у этих конструкций преобразователей велика индуктивная связь между катущками управления. Указанные преобразователи имеют якорь, вдоль которого проходит либо поляризующий, либо управляющий поток, поэтому необходимо делать якорь ферромагнитным и с достаточным поперечным сечением.
Это приводит так же к увеличению инерционности якоря и к снижению быстродействия устройства в целом.
Цель изобретения - увеличить быстродействие и уменьшить необходимую мощность управления.
Это достигается тем, что магнитопроводы преобразователя соединены посредине постоянным магнитом так, что каждый его полюс прилегает только к одному магнитопроводу, торцовые поверхности которых образуют две пары рабочих воздушных зазоров с магнитопроводящими пластинами на концах якоря. Ось последнего лежит в одной плоскости с осью постоянного магнита и по крайней мере по одну сторону от этой плоскости. В магнитопроводах выполнены делящие их поперечное
сечение на части сквозные пазы, в которые
улолгена обмотка управления, обхватывающая
части обоих магнитопроводов.
Для обеспечения возможности дифференциального управления другая обмотка располагается в пазах магнитопровода симметрично первой.
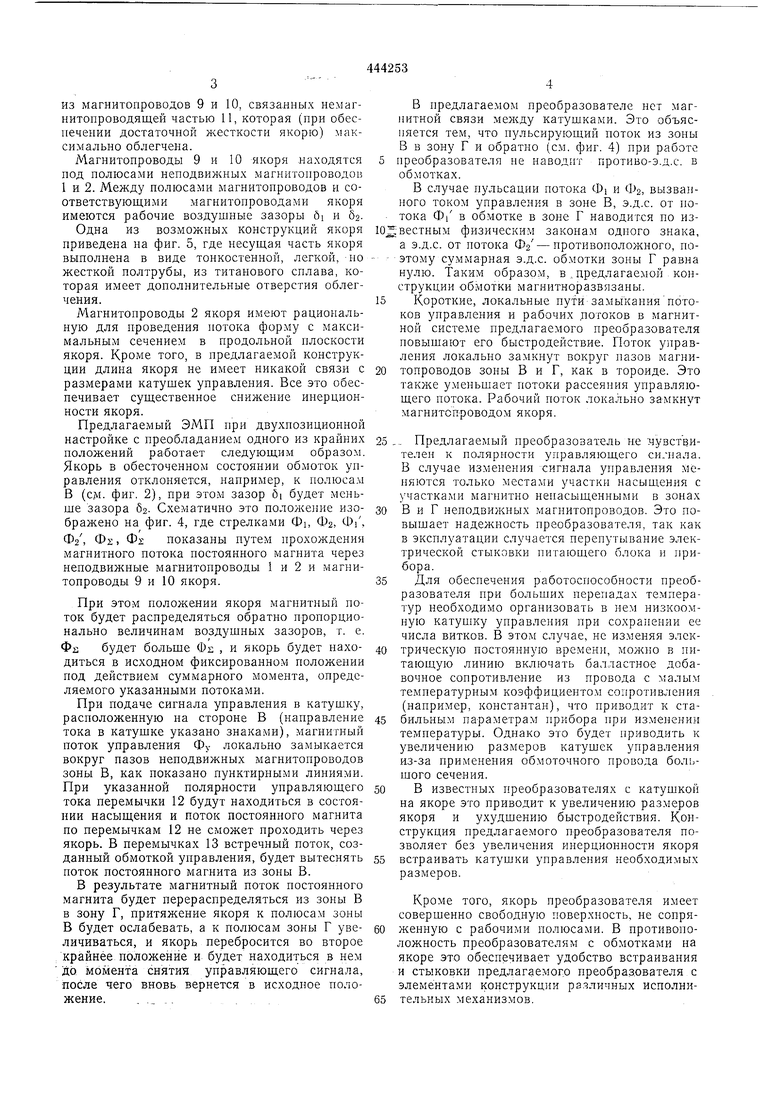
На фиг. 1 изображен предлагаемый преобразователь; на фиг. 2 - вид по стрелке А на
фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 1; на фиг. 4 - устройство в обесточенном состоянии; на фиг. 5 - устройство, общий вид.
Магнитоэлектрическая система ЭЛ1П состоит из неподвижной части и подвижного
якоря. Неподвижная часть имеет два магнитопровода 1 и 2, между которыми расположен постоянный магнит 3, полюса последнего прилегают к магнитопроводам. Торцовые поверхности магнитопровода образуют две пары рабочих полюсов.
На концах каждого магнитопровода и.меется сквозной паз 4, в который проходят витки катушек 5 и б управления. Подвижный якорь 7 закреплен в корпусе на оси 8, которая проходит через центр масс якоря. Якорь состоит
из магнитопроводов 9 и 10, связанных немагнитопроводящей частью 11, которая (при обесиечеиии достаточной жесткости якорю) максимально облегчена.
Магнитопроводы 9 и 10 якоря находятся иод иолюсами неподвижных магнитоироводоп 1 и 2. Между полюсами магнитопроводов и соответствующими магнитопроводами якоря имеются рабочие воздушные зазоры 6i и 62.
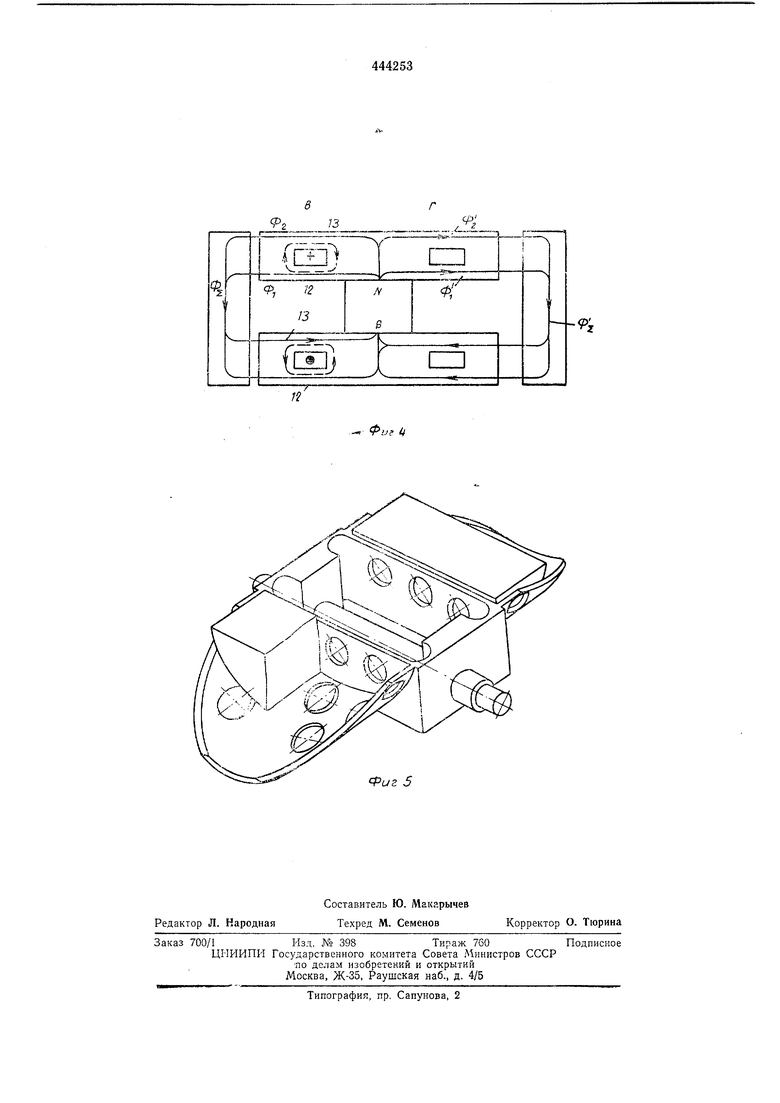
Одна из возможных конструкций якоря приведена на фиг. 5, где несущая часть якоря выполнена в виде тонкостенной, легкой, по жесткой полтрубы, из титанового сплава, которая имеет дополнительные отверстия облегчения.
Магнитоироводы 2 якоря имеют рациональную для проведения потока форму с максимальным сечением в продольной плоскости якоря. Кроме того, в предлагаемой конструкции длина якоря не имеет никакой связи с размерами катушек управления. Все это обеспечивает существенное снилсение инерционности якоря.
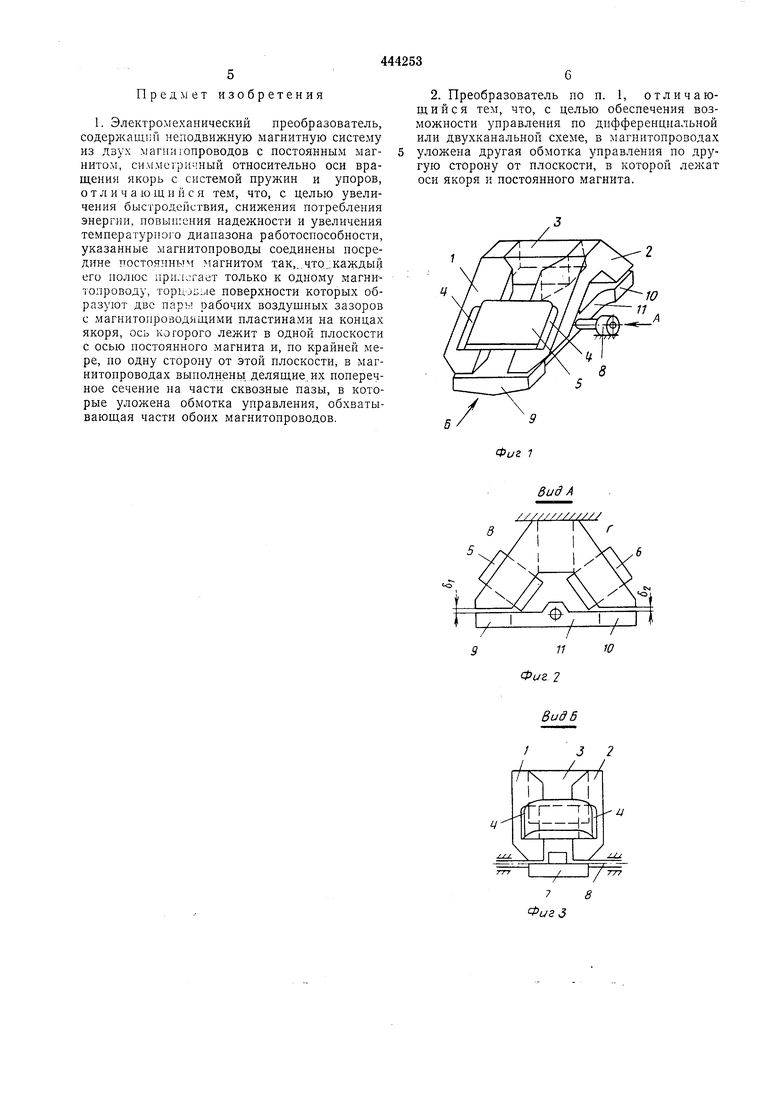
Предлагаемый ЭМП при двухпозициопной настройке с преобладанием одного из крайних положений работает следующим образом. Якорь в обесточенном состоянии обмоток управления отклоняется, например, к полюсам В (см- фиг. 2), при этом зазор 5i будет меньше зазора 62. Схематично это положение изображено на фиг. 4, где стрелками Фь Ф2, Ф/, 2, Фг: Фа показаны путем прохождения магнитного потока постоянного магнита через неподвижные магнитопроводы 1 и 2 и магнитопроводы 9 и 10 якоря.
При этом положении якоря магнитный поток будет распределяться обратно пропорционально величинам воздушных зазоров, т. е. Фа будет больше Фц , и якорь будет находиться в исходном фиксированном положении под действием суммарного момента, определяемого указанными потоками.
При подаче сигнала управления в катушку, расположенную на стороне В (направление тока в катушке указано знаками), магнитный поток управления Фу локально замыкается вокруг пазов неподвижных магнитонроводов зоны В, как показано пунктирными линиями. При указанной полярности управляющего тока перемычки 12 будут находиться в состоянии насыщения и поток постоянного магнита по перемычкам 12 не сможет проходить через якорь. В перемычках 13 встречный поток, созданный обмоткой управления, будет вытеснять поток постоянного магнита из зоны В.
В результате магнитный поток постоянного магнита будет перераспределяться из зоны В в зону Г, притяжение якоря к полюсам зоны В будет ослабевать, а к полюсам зоны Г увеличиваться, и якорь перебросится во второе крайнее положение и будет находиться в нем до. момента снятия управляющего сигнала, после чего вновь вернется в исходное положение. . . -.. ,
В предлагаемом преобразователе нет магнитной связи между катушками. Это объясняется тем, что пульсирующий ноток из зоны В в зону Г и обратно (см. фиг. 4) при работе преобразователя не наводит противо-э.д.с. в обмотках.
В случае пульсации потока Ф1 и Ф2, вызванного током управления в зоне В, э.д.с. от потока Ф1 в обмотке в зоне Г наводится по из;вестным физическим законам одного знака, а э.д.с. от потока Ф2 - противоположного, поэтому суммарная э.д.с. обмотки зоны Г равна нулю. Таким образом, в ,предлагаемой конструкции обмотки магнитноразвязапы.
Короткие, локальные пути замыкания потоков управления и рабочих потоков в магнитной систе.ме предлагаемого преобразователя повышают его быстродействие. Поток управления локально замкнут вокруг пазов магнитопроводов зоны В и Г, как в тороиде. Это также уменьшает потоки рассеяния управляющего потока. Рабочий поток локально замкнут магнитопроводом якоря.
-. Предлагаемый преобразователь не чувствителен к полярности управляющего си.-пала. В случае изменения сигнала управления меняются только местами участки насыщения с участками магнитно ненасыщенными в зонах В и Г неподвижных магнитопроводов. Это повышает надежность преобразователя, так как в эксплуатации случается перепутывание электрической стыковки питающего блока и прибора.
Для обеспечения работоспособности преобразователя при больших перепадах температур необходимо организовать в нем низкоомную катушку управления при сохранении ее числа витков. В этом случае, не изменяя электрическую постоянную времени, можно в питающую линию включать балластное добавочное сопротивление из провода с малым температурным коэффициентом сопротивления (например, константан), что приводит к стабильным параметрам прибора при измепении температуры. Однако это будет приводить к увеличению размеров катушек управления из-за применения обмоточного провода большого сечения.
В известных преобразователях с катушкой на якоре это приводит к увеличению размеров якоря и ухудшению быстродействия. Конструкция предлагаемого преобразователя позволяет без увеличения инерционности якоря встраивать катушки управления необходимых размеров.
Кроме того, якорь преобразователя имеет совершенно свободную поверхность, не сопряженную с рабочими полюсами. В противоположность преобразователям с обмотками на якоре это обеспечивает удобство встраивания и стыковки предлагаемого преобразователя с элементами конструкции различных исполнительных механизмов.
Предмет изобретения
В
5
2
73
.
- Фиг ii
иг 5
