1
Известны оптические панкратические системы, состоящие из движущихся по линейным законам и неподвижных компонентов.
Цель изобретения - устранение остаточных дефокусировок и повышение кратности увеличения при уменьшении величин продольного перемещения компонентов.
Для этого предлагаемая система выполнена из не менее двух групп корригированных компонентов с разнозначными автономно сбалансированными дефокусировками Амакс, определяемыми из соотношения
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ (ВАРИАНТЫ) И РАСТРОВЫЙ ЭЛЕКТРОННЫЙ МИКРОСКОП | 2009 |
|
RU2415380C1 |
| ПАНКРАТИЧЕСКАЯ СИСТЕМА | 2016 |
|
RU2649596C1 |
| Проекционная панкратическая система | 1976 |
|
SU569998A1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ В НЕКОГЕРЕНТНОМ СВЕТЕ | 2002 |
|
RU2212044C1 |
| ОПТИЧЕСКАЯ СИСТЕМА | 2010 |
|
RU2431166C1 |
| Панкратический объектив | 1983 |
|
SU1109705A1 |
| СПОСОБ ИЗМЕНЕНИЯ НАПРАВЛЕНИЯ ВИЗИРНОЙ ОСИ В ОПТИЧЕСКОМ ПРИЦЕЛЕ И ПРИЦЕЛ С ПЕРЕМЕННЫМ УВЕЛИЧЕНИЕМ, РЕАЛИЗУЮЩИЙ СПОСОБ | 2012 |
|
RU2501051C1 |
| ВИЗИР С ПЕРЕМЕННЫМ УВЕЛИЧЕНИЕМ | 1999 |
|
RU2157556C1 |
| Объектив с переменным фокусным расстоянием | 1982 |
|
SU1068868A1 |
| ИНФРАКРАСНЫЙ ОБЪЕКТИВ С ПЛАВНО ИЗМЕНЯЮЩИМСЯ ФОКУСНЫМ РАССТОЯНИЕМ | 2014 |
|
RU2578661C1 |
макс -
,5
.
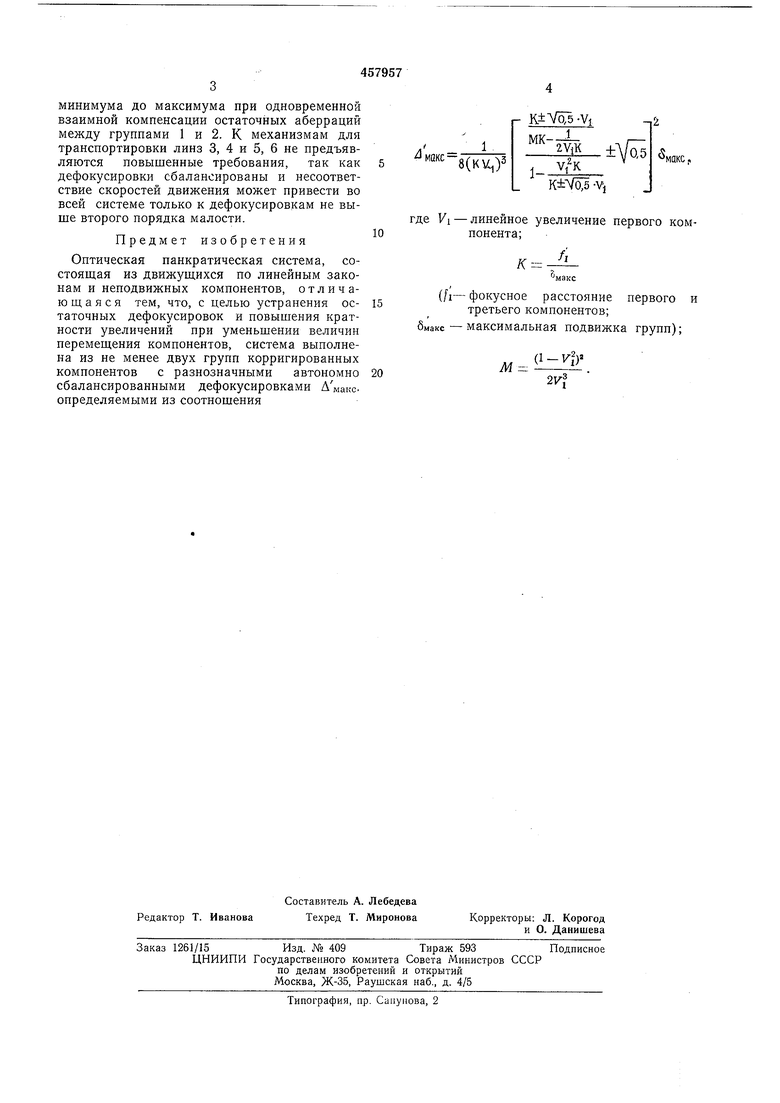
минимума до максимума при одновременной взаимной компенсации остаточных аберраций между группами 1 и 2. К механизмам для транспортировки линз 3, 4 и 5, 6 не предъявляются повышенные требования, так как дефокусировки сбалансированы и несоответствие скоростей движения может привести во всей системе только к дефокусировкам не выше второго порядка малости.
Предмет изобретения
Оптическая панкратическая система, состоящая из движуш.ихся по линейным законам и неподвижных компонентов, отличающаяся тем, что, с целью устранения остаточных дефокусировок и повышения кратности увеличений при уменьшении величин перемещения компонентов, система выполнена из не менее двух групп корригированных компонентов с разнозначными автономно сбалансированными дефокусировками Дмакс. определяемыми из соотношения
-.2
.,
где Vi - линейное увеличение первого компонента;
fl
к--
(/г- фокусное расстояние первого и третьего компонентов;
бмакс - максимальная подвижка групп);
(
М2Vf
