На фиг. 1 чертежа изображен продольный разрез по ШЩ фиг. 2 предлагаемых весов, на фиг. 2 - разрез по ЮЗ фиг. 1, на фиг. 3 - разрез по ФЦ фиг. 1 и на фиг. 4 - запорное устройство для сыпучих тел.
Одно плечо коромысла А имеет вид вилки, через концы которой проходит ось 1, на которой, в свою очередь, укреплены два сосуда Б, Б, соединенные между собой основаниями. Оба сосуда 5 и Б свободно вращаются между вилкой на концах оси 1. На другом конце коромысла А подвешен груз В, который при помощи обоймы 20 может перемещаться ближе к точке опоры Г, Г, или дальще от нее. Коромысло А имеет в точках Г и Г опоры в виде двух трехгранных призм, которые прочно укреплены в основании двух рам Д, Д. Эти рамы между собой соединены прочно шестью длинными тяжами 2, 3, 4, 5, б, 7 и, кроме того, днищем верхнего сосуда Д. Кроме прочного соединения рам между собой, тяжи б и 7 служат также опорами для
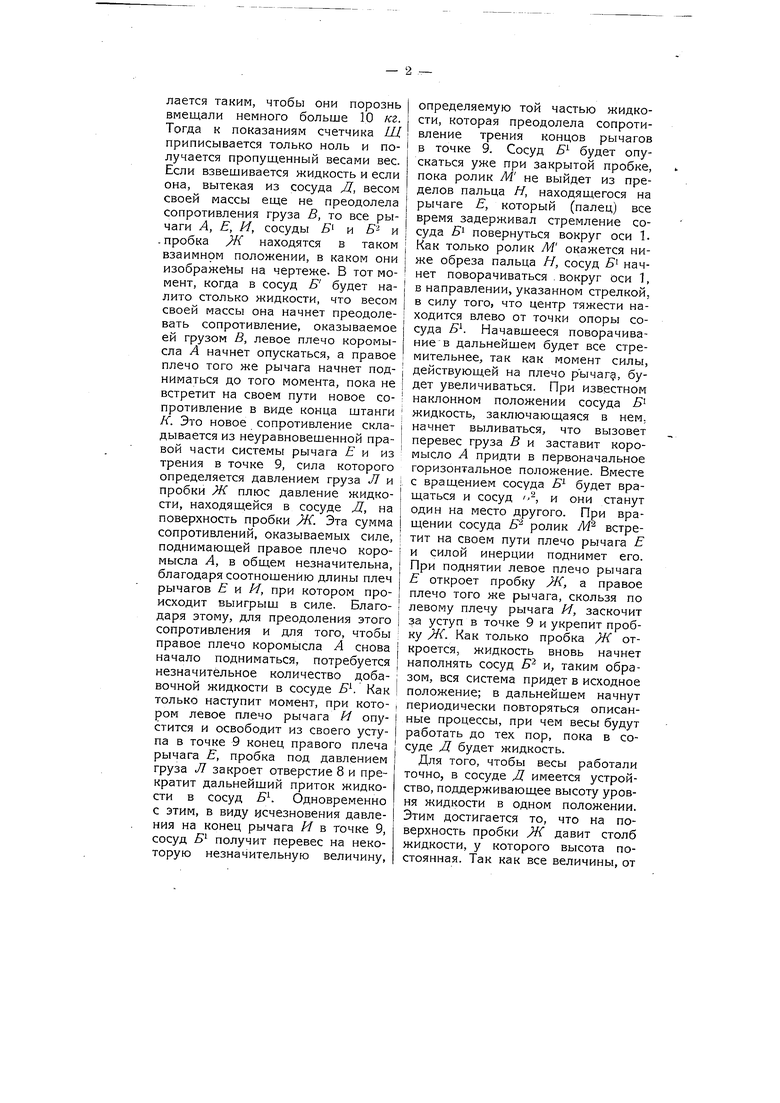
правого плеча рычага А в том случае, когда груз В не уравновешен взвешиваемой жидкостью. На оси 3 помещен поворотно рычаг Е. Левым концом рычаг Е подвижно соединен с штифтом, идущим от пробки Ж, которая предназначена для закрывания отверстия 8 сосуда Д. На пробку }К оказывает давление груз Л посредством штифта 11. На тяже 5 помещен другой рычаг И, свободно вращающийся вокруг этого тяжа, как около оси. На левом своем конце в точке 9 рычаг имеет уступ за который, в определенном положении всей системы, заскакивает конец правого плеча рычага Е. К правому плечу рычага И в точке 10 подвешена штанга К, другим своим концом несколько недоходящая до правого плеча коромысла А. Груз В, имеющий определенный вес и подвешенный в определенной точке уравновешивает собой наполненный взвешиваемым веществом сосуд В . Для удобства определения количества жидкости или сыпучего тела, пропущенного весами, обем сосудов Б v( Б делается таким, чтобы они порознь вмещали немного больше 10 кг. Тогда к показаниям счетчика Щ приписывается только ноль и получается пропущенный весами вес. Если взвещивается жидкость и если она, вытекая из сосуда Д, весом своей массы еще не преодолела сопротивления груза В, то все рычаги А, Е, И, сосуды Я и Я и . пробка yW находятся в таком взаимном положении, в каком они изображены на чертеже. В тот момент, когда в сосуд Б будет налито столько жидкости, что весом своей массы она начнет преодолевать сопротивление, оказываемое ей грузом В, левое плечо коромысла А начнет опускаться, а правое плечо того же рычага начнет подниматься до того момента, пока не встретит на своем пути новое сопротивление в виде конца щтанги К. Это новое сопротивление складывается из неуравновещенной правой части системы рычага f и из трения в точке 9, сила которого определяется давлением груза Л и пробки Ж плюс давление жидкости, находящейся в сосуде Д, на поверхность пробки }К. Эта сумма сопротивлений, оказываемых силе, поднимающей правое плечо коромысла А, в общем незначительна, благодаря соотношению длины плеч рычагов Е И, при котором происходит выигрыщ в силе. Благодаря этому, для преодоления этого сопротивления и для того, чтобы правое плечо коромысла А снова начало подниматься, потребуется незначительное количество добавочной жидкости в сосуде Б. Как только наступит момент, при котором левое плечо рычага И опустится и освободит из своего уступа в точке 9 конец правого плеча рычага Е, пробка под давлением груза Л закроет отверстие 8 и прекратит дальнейщий приток жидкости в сосуд Б. Одновременно с этим, в виду исчезновения давления на конец рычага И в точке 9, сосуд Б получит перевес на некоторую незначительную величину.
определяемую той частью жидкости, которая преодолела сопротивление трения концов рычагов в точке 9. Сосуд Б будет опускаться уже при закрытой пробке, пока ролик М не выйдет из пределов пальца //, находящегося на рычаге Е, который (палец) все время задерживал стремление сосуда Б повернуться вокруг оси 1. Как только ролик М окажется ниже обреза пальца //, сосуд Б начнет поворачиваться .вокруг оси 1, в направлении,указанном стрелкой, в силу того, что центр тяжести находится влево от точки опоры сосуда Б. Начавшееся поворачивание в дальнейщем будет все стремительнее, так как момент силы, действующей на плечо рь1чагд, будет увеличиваться. При известном наклонном положении сосуда Б жидкость, заключающаяся в нем, начнет выливаться, что вызовет перевес груза В и заставит коромысло А придти в первоначальное горизонтальное положение. Вместе с вращением сосуда Б будет вращаться и сосуд , и они станут один на место другого. При вращении сосуда Б ролик М встретит на своем пути плечо рычага Е и силой инерции поднимет его. При поднятии левое плечо рычага Е откроет пробку Ж, а правое плечо того же рычага, скользя по левому плечу рычага И, заскочит за уступ в точке 9 и укрепит пробку Ж. Как только пробка откроется, жидкость вновь начнет наполнять сосуд Б и, таким образом, вся система придет в исходное положение; в дальнейшем начнут периодически повторяться описанные процессы, при чем весы будут работать до тех пор, пока в сосуде Д будет жидкость.
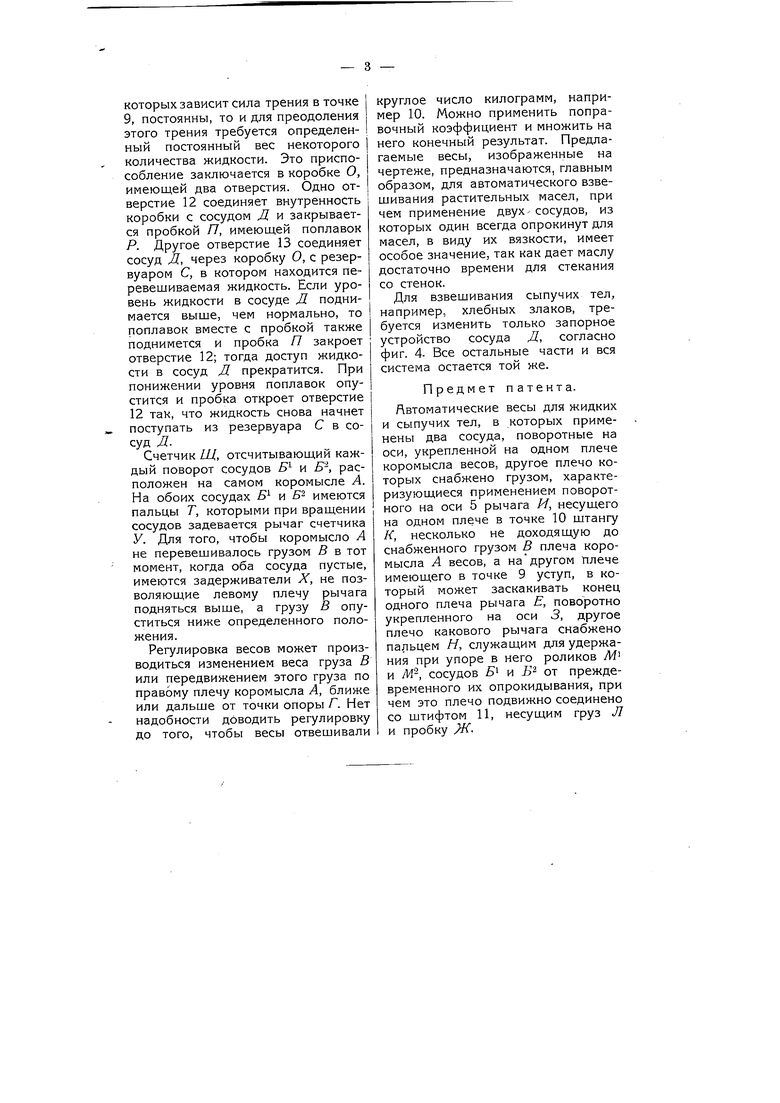
Для того, чтобы весы работали точно, в сосуде Д имеется устройство, поддерживающее высоту уровня жидкости в одном положении. Этим достигается то, что на поверхность пробки Ж давит столб жидкости, у которого высота постоянная. Так как все величины, от
которых зависит сила трения в точке 9, постоянны, то и для преодоления этого трения требуется определенный постоянный вес некоторого количества жидкости. Это приспособление заключается в коробке О, имеющей два отверстия. Одно отверстие 12 соединяет внутренность коробки с сосудом Д и закрывается пробкой /7, имеющей поплавок Р. Другое отверстие 13 соединяет сосуд Д, через коробку О, с резервуаром С, в котором находится перевешиваемая жидкость. Если уровень жидкости в сосуде Д поднимается выше, чем нормально, то поплавок вместе с пробкой также поднимется и пробка /7 закроет отверстие 12; тогда доступ жидкости в сосуд Д прекратится. При понижении уровня поплавок опустится и пробка откроет отверстие 12 так, что жидкость снова начнет поступать из резервуара С в сосуд Д.
Счетчик Щ, отсчитывающий каждый поворот сосудов Б и Б , расположен на самом коромысле А. На обоих сосудах 5 и 6 имеются пальцы Т, которыми при вращении сосудов задевается рычаг счетчика У. Для того, чтобы коромысло А не перевешивалось грузом В в тот момент, когда оба сосуда пустые, имеются задерживатели X, не позволяющие левому плечу рычага подняться выше, а грузу В опуститься ниже определенного положения.
Регулировка весов может производиться изменением веса груза В или передвижением этого груза по правому плечу коромысла Л, ближе или дальше от точки опоры Г. Нет надобности доводить регулировку до того, чтобы весы отвешивали
круглое число килограмм, например 10. Можно применить поправочный коэффициент и множить на него конечный результат. Предлагаемые весы, изображенные на чертеже, предназначаются, главным образом, для автоматического взвешивания растительных масел, при чем применение двух- сосудов, из которых один всегда опрокинут для масел, в виду их вязкости, имеет особое значение, так как дает маслу достаточно времени для стекания со стенок.
Для взвешивания сыпучих тел, например, хлебных злаков, требуется изменить только запорное устройство сосуда Д, согласно фиг. 4. Все остальные части и вся система остается той же.
Предмет патента.
Автоматические весы для жидких и сыпучих тел, в которых применены два сосуда, поворотные на оси, укрепленной на одном плече коромысла весов, другое плечо которых снабжено грузом, характеризующиеся применением поворотного на оси 5 рычага //, несущего на одном плече в точке 10 штангу К, несколько не доходящую до снабженного грузом В плеча коромысла А весов, а надругом плече имеющего в точке 9 уступ, в который может заскакивать конец одного плеча рычага Е, поворотно укрепленного на оси 3, другое плечо какового рычага снабжено пальцем Я, служащим для удержания при упоре в него роликов УИ и /И, сосудов 5 и Ь2 от преждевременного их опрокидывания, при чем это плечо подвижно соединено со штифтом 11, несущим груз Л и пробку ЖJo-,f
т- - - фиг 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматические весы для сыпучих материалов | 1928 |
|
SU22302A1 |
| Автоматические весы для сыпучих тел | 1928 |
|
SU18960A1 |
| АВТОМАТИЧЕСКИЕ ВЕСЫ ДЛЯ ОТВЕШИВАНИЯ РАВНЫХ ПО ВЕСУ ПОРЦИЙ СЫПУЧЕГО МАТЕРИАЛА | 1927 |
|
SU7684A1 |
| АВТОМАТИЧЕСКИЕ ВЕСЫ ДЛЯ СЫПУЧИХ ТЕЛ | 1933 |
|
SU38334A1 |
| Устройство для механизации выпарки сахарных сиропов | 1932 |
|
SU40797A1 |
| Автоматические весы для жидких тел | 1932 |
|
SU31633A1 |
| Автоматические весы для сыпучих тел | 1932 |
|
SU33708A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ПРОТЕКАЮЩЕЙ ПО ТРУБАМ ЖИДКОСТИ | 1925 |
|
SU3166A1 |
| АВТОМАТ ДЛЯ ОТПУСКА ЖИДКОСТИ | 1931 |
|
SU26478A1 |
| Двухкамерный сифонный водомер с полым коромыслом распределения | 1923 |
|
SU1444A1 |


