1
f Известны кормораздатчики, содержащие бункер, на дне которого расположен пода;ющий транспортер, снабженный храповым механизмом, соединенным через силовой цилиндр с г-идрораспределителем, и счесывающий транспортер с цепным приводом.
В известных кормораздатчиках отсутствует устройство для автоматического регулирования скорости подаюшего транспортера в зависимости от плотности корма,
;. поэтому скорость перемещения подающего транспортера изменяют вручную, что значительно усложняет обслуживание таких кормораздатчиков.
В предлагаемом кормораздатчике с целью
автоматического регулирования скорости подающего транспортера в зависимости от плотности корма на бункере закреплен поворотный двуплечий рычат-, один конец которого подпружинен, а другой - снабжен датчиком, выполненным в виде звездочки установлецной на ведущей ветви привода счесывающего транспортера и связанной с золотником 1идрораспреаелителя.
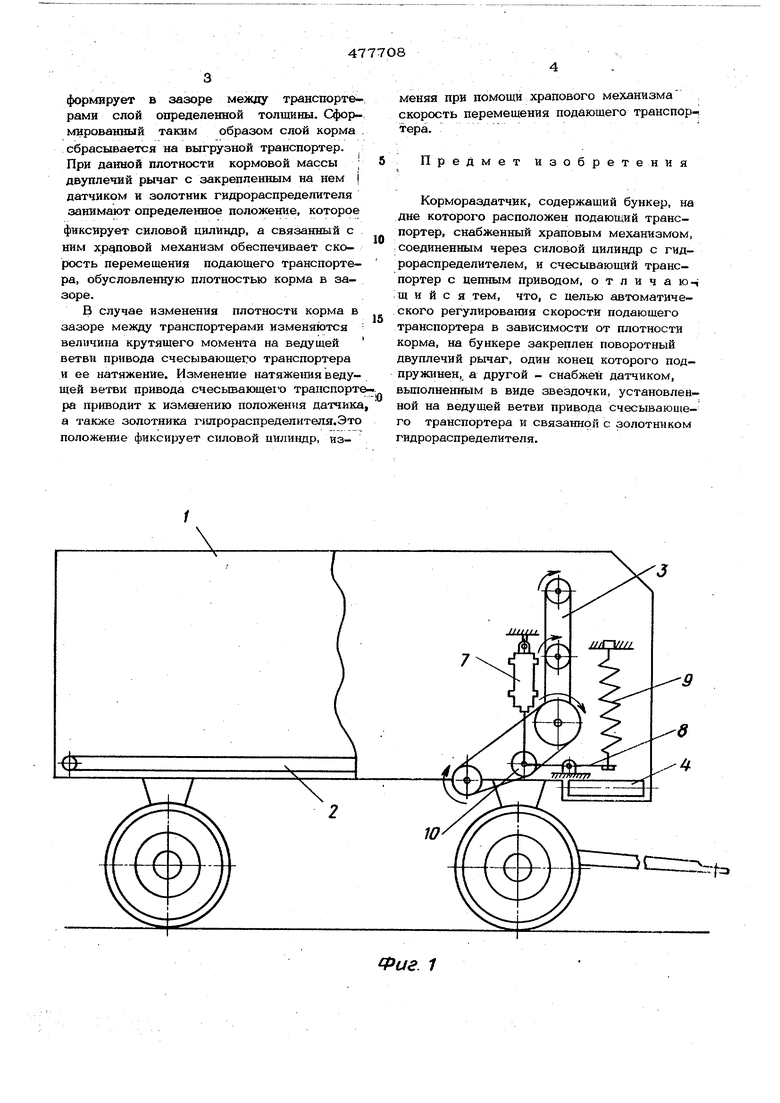
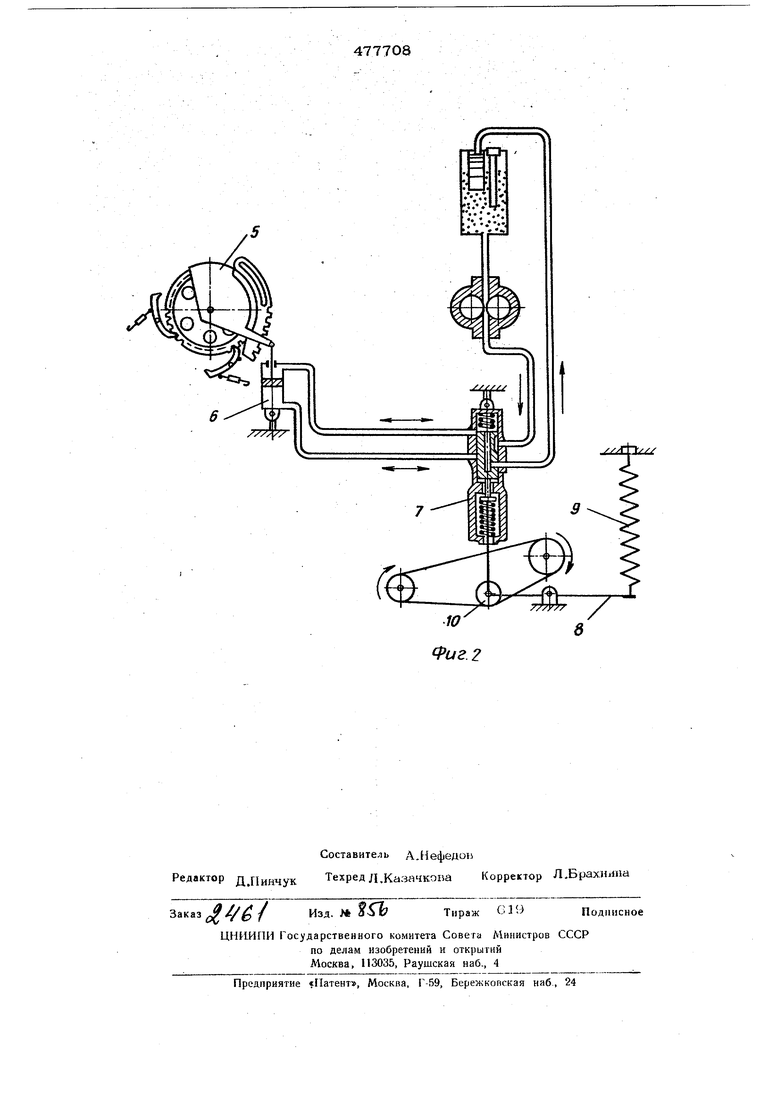
На фиг. 1 схематически изображен предлагаемый кормораздатчик, вид сбоку; на ,фиг. 2 - принципиальная схема автоматического устройства для регулирова1П1я скорости подающего транспортера.
Кормораздатчик содержит смонтированный па ходовой части бункер 1, в котором установлены подающий 2, счесывающий 3 и выгрузной 4 транспортеры.
Подающей транспортер снабжен храповым механизмом 5, соединенным со щтоком силового цилиндра 6, управляемого от гидрораспределителя 7.
На бункере кормораздатчика закреплен поворотный двуплечий рычаг 8, один конец которого связан с пружиной 9, а другой снабжен датчиком. Датчик выполнен в вид звездочки 1О, установленной на ведущей ветви привода счесывающего транспортера 3, и соединен с золотником гидрораспределителя 7. При помощи пружины 9 изменяют норму вьщачи корма.
При работе кормораздатчика кормовая масса подводится подающим транспортером ;j счесьгоающему транспортеру, который формирует в зазоре между транспоргерами слой определенной толщины. Сформированный таким образом слой корма сбрасывается на выгрузной транспортер. При данной плотности кормовой массы ; двуплечий рычаг с закрепленным на нем | датчиком и золотник гидрораспределителя занимают определенное положение, которое фиксирует силовой цилиндр, а связанный с ним храповой механизм обеспечивает скорость перемещения подающего транспортера, обусловленную плотностью корма в зазоре. В случае изменения плотности корма в зазоре между транспортерами изменяк)тся величина крутящего момента на ведущей ветви привода счесывающего транспортера и ее натяжение. Изменение натяжения в едущей ветви привода счесьтающехо транспорте ра приводит к измааению положения датчика а также золотника пшрораспределителя.Это положение фиксирует силовой цилиндр, изменяя при помощи храпового механизма скорость перемещения подающего транспор-i тара. Предмет изобретения Кормораздатчик, содержащий бункер, на дне которого расположен подающий транспортер, снабженный храповым механизмом, соединенным через силовой цилиндр с гидрораспределителем, и счесывающий транспортер с цепным приводом, отличаю щ и и с я тем, что, с целью автоматического регулирования скорости подающего транспортера в зависимости от плотности корма, на бункере закреплен поворотный двуплечий рычаг, один конец которого подпружинен,, а другой - снабжен датчиком, выполненным в виде звездочки, установленной на ведущей ветви привода счесывающего транспортера и связанной с золотником гидрораспределителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кормораздатчик | 1977 |
|
SU736915A1 |
| Питатель-дозатор стебельчатых кормов | 1983 |
|
SU1130291A1 |
| Кормораздатчик | 1989 |
|
SU1618357A2 |
| Кормораздатчик | 1978 |
|
SU753405A1 |
| Кормораздатчик | 1980 |
|
SU957806A1 |
| Питатель раздатчика стебельчатых кормов | 1981 |
|
SU1005740A1 |
| Кормораздатчик | 1978 |
|
SU695627A1 |
| Кормораздатчик | 1987 |
|
SU1445653A2 |
| Кормораздатчик | 1985 |
|
SU1337009A1 |
| РАЗДАТЧИК КОРМОВ | 2000 |
|
RU2181242C2 |
Фиг. 1
