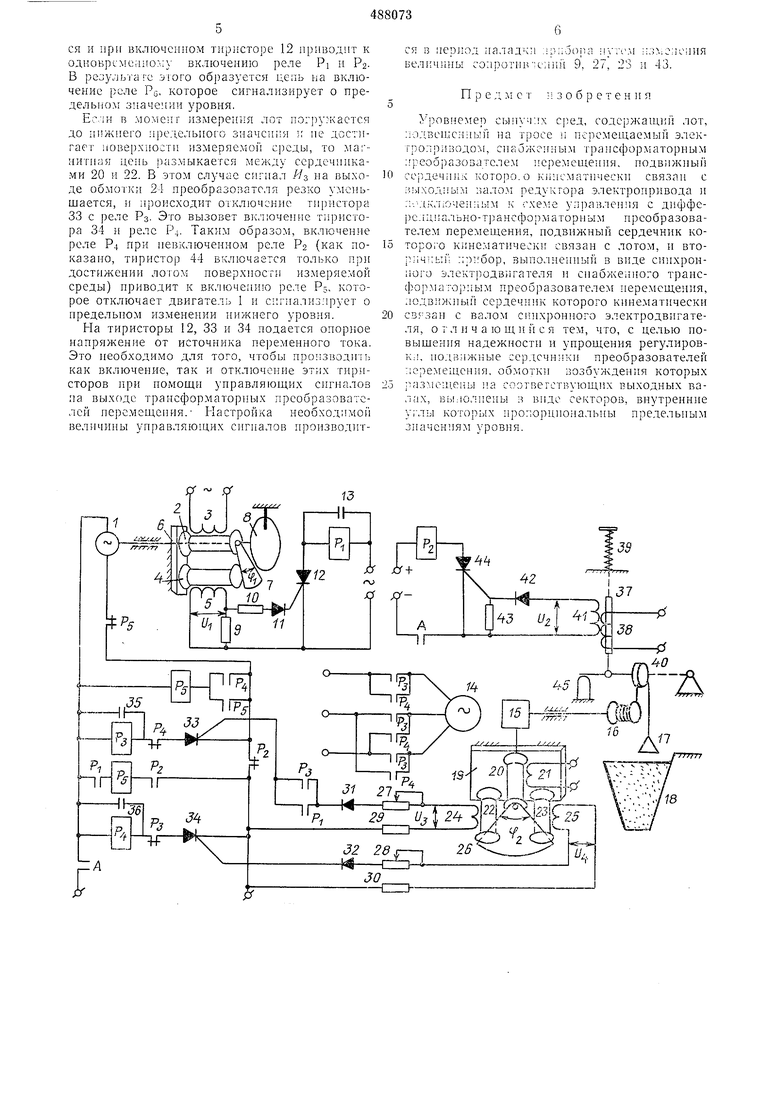
буждения 21 трансформаторного преобразователя перемещения. Параллельно сердечнику 20 и на равной высоте с ним на магнитном основании 19 закреплены сердечники 22, 23, на которых размещены соответственно обмотки 24, 25 управления трансформаторного преобразователя.
Подвижный сердечник 26 трансформаторного преобразователя перелмещения выполнен в виде сектора с внутренним углом ф2 и закреплен на однооборотном валу редуктора с торцовой стороны сердечника 20.
Обмотки 24, 25 трансформаторного преобразователя подключены соответственно через подстроечные сопротивления 27, 28, термочувствительные сопротивления 29, 30 и выпрямительные диоды 31, 32 к управляющим электродам тиристоров 33, 34 схемы управления. В анодные цепи тиристоров 33, 34 включены обмотки реле РЗ, Р4, которые зашунтированы конденсаторами 35, 36, выполняющими роль сглаживающих фильтров.
Переключающий блок схемы управления состоит из трансформаторного преобразователя перемещения, подвижный сердечник 37 которого снабжен обмоткой 38 возбуждения и с одной стороны кинематически связан с возвратной пружиной 39, а с другой стороны - с вращающимся роликом 40 рычажной системы, соединенным с лотом при помощи троса.
Обмотка управления 41 трансформаторного преобразователя переключающего блока подключена через выпрямительный диод 42 и подстроечное сопротивление 43 к управляющим электродам тиристора 44, в анодную цепь которого включена обмотка исполнительного реле РЗ.
Кинематическая часть переключающего бло.ка снабжена ограничителем 45 хода рычажной системы.
Система сигнализации предельных значений уровня состоит из реле PS и Ре, последовательно которым включены контакты реле схемы управления.
Работает уровнемер следующим образом.
После замыкания контакта А автоматического устройства через н. з. контакты реле PZ и PS включается синхронный двигатель 1 вторичного, прибора, который вращает подвижный сердечник 7 и щкалу 8.
При этом вторичный прибор настраивается так, что при исходном положении шкалы относительно указателя магнитная цепь сердечников 2, 4 замыкается с помощью подвижного сердечника 7, и сигнал MI на выходе обмотки 5 резко возрастает. Это приводит к включению тиристора 12 и реле РЬ которое замыкает управляющую цепь тиристора 33, что приводит к включению реле РЗ.
С включением реле РЗ блокируется контакт PI в цепи управления тиристора 33, и подается команда на включение двигателя 14. Двигатель 14 включается, и через редуктор 15, вращая барабан 16, с помощью троса, перекинутого через ролик 40 рычажной системы, погружает лот 17 в емкость с измеряемой средой.
После того, как лот Г/ достшпет поверхности измеряемой среды, трос ослабляется, и сердечник 37 с обмоткой 38 под действием пружины 39 переместится в сторону сигнальной обмотки 41. На выходе этой обмотки произойдет увеличение сигнала HZ и это приводит к включению тиристора 44 с реле PZПосле включения реле PZ его контакт в схеме управления размыкается, а это приводит к отключению синхронного двигателя 1 и тиристора 33 с реле РЗ. В результате отключения реле РЗ его н. з. блокировочный контакт замыкается в цени тиристора 34. При этом реле Р4 включается, размыкает н.э. блокировочный контакт в цепи реле РЗ и подает команду реверсивному двигателю 14 для подъема лота 17.
ному двигателю 14 для подъема лота 17.
Угол ф2 подвижного сердечника 26 трансформаторного преобразователя электропривода выбран таким, что замыкание магнитной цепи между сердечником 20 и сердечниками
22, 23 обеспечивается только в интервале дв)1жения лота от исходного положения до про дельного значения нижнего уровня.
В данном случае сердечники 22, 23 установлены так, что при погружении лота подвижный сердечник 26 вращается в сторону сердечника 23, а при подъеме лота - в сторону сердечника 22, поэтому при подъеме лота в исходное положение магнитная цепь между сердечниками 20 и 23 размыкается, сигнал
4 на выходе обмотки 25 резко уменьшается, тиристор 34 с реле Р4 отключается, и двигатель останавливается.
При этом вся схема будет отключена кроме тиристора 44, который отключается только
после съема общей команды, т. е. при размыкании контакта А.
Так как погружение лота происходит по команде вторичного прибора с исходного значения шкалы, а отключение вторичного прибора осуществляется в момент достижения лотом поверхности измеряемой среды, то показания на шкале прибора при соответствующей градуировке отражают уровень измеряемой среды.
Сигнализация о достижении предельных значений уровня осуществляется следующим образом.
Чтобы получить сигнал о предельно.м значении верхнего уровня угол ф1 подвижного сердечника 7 вторичного прибора выбран таким, чтобы в интервале движения лота от исходного положения и до предельного значения верхнего уровня обеспечивалось замыкание магнитной цепи между сердечниками 2 и 4 трансформаторного преобразователя перемещения. В этом случае сигнал HI на выходе обмотки 5 преобразователя достаточно высок, и тиристор 12 остается включенным. Поэтому в момент измерения, если уровень достиг верхнего
предельного значения, тиристор 44 включает
| название | год | авторы | номер документа |
|---|---|---|---|
| УРОВНЕМЕР СЫПУЧИХ СРЕД | 1971 |
|
SU315944A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ РАСХОДА И ДАВЛЕНИЯ | 1973 |
|
SU375491A1 |
| Многоточечный термометр | 1973 |
|
SU451922A1 |
| Поплавковый плотномер | 1972 |
|
SU441475A1 |
| Автоматический титратор | 1982 |
|
SU1096576A1 |
| УСТРОЙСТВО для МНОГОТОЧЕЧНОГО КОНТРОЛЯ ТЕМПЕРАТУРЫ | 1973 |
|
SU408171A1 |
| УРОВНЕМЕР СЫПУЧИХ СРЕД | 1969 |
|
SU253399A1 |
| Устройство для измерения уровня жидкости | 1980 |
|
SU934230A1 |
| Устройство для заливки расплава в формы | 1988 |
|
SU1533832A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ТЕПЛОСИЛОВЫМ АГРЕГАТОМ | 1972 |
|
SU353107A1 |
