1
Изобретение относится к области электротехники и может быть использовано при определении индуктивных сопротивлений электрических машин.
Известны способы определения переходных и сверхпереходных индуктивных сопротивлений электрических машин, основанные на измерении этих параметров в режиме короткого замыкания машины.
Однако опыт короткого замыкания сопровождается осциллографированием большого количества параметров с их последуюш,ей графоаналитической обработкой, что требует значительных затрат времени и наличия большого количества приборов и оборудования.
С целью упрош,ения способа определения указанных сопротивлений электрическую машину подключают через выпрямитель к регулируемой нагрузке, устанавливают одно значение нагрузки и замеряют угол коммутации, затем устанавливают другое значение нагрузки и замеряют угол коммутации при том же напряжении на зажимах якорной обмотки, после чего определяют искомые параметры из системы уравнений.
ui- Xi + biXz XK,
+ bzXz -VK,,
е ai
1 I sin2Yi .
singyg
-Ь --, az 4Ya
24Yi
sin2Yi. , siii2Y2
&i , Й2
4у2
4Yi
x-K, , XK,, Yi. Y2 - индуктивные сопротивления коммутации и углы коммутации для двух режимов соответственно.
Как известно, синхронная машина, напруженная на выпрямительную нагрузку, периодически попадает в режим несимметричного внезапного короткого замыкания вследствие коммутации вентилей выпрямителя. Этот режкм является квазиустановившимся для заданного режима работы или нагрузки при неизменном возбуждении. Индуктивное сопротивление коммутации х , представляющее собой индуктивное сопротивление фазы якоря
синхронной машины за период коммутации, очевидно, может быть представлено так же, как индуктивное сопротивлепие фазы синхронной машины при несимметричном коротком замыкании. Тогда для мгновенного значения Xi можно записать следуюшее выражение
x,(xd + xq
+ () cos2u), (2)
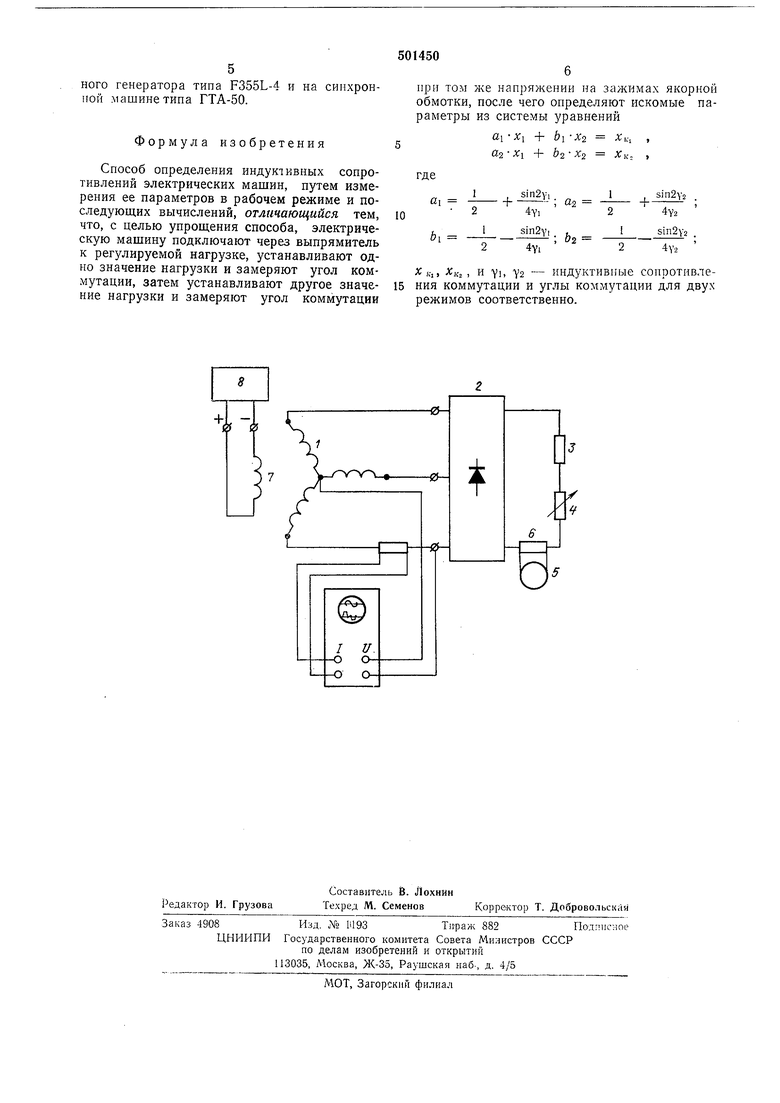
где в случае машин без демферной клетки вместо xd и xq записываются соответствен30но xd и xq (ot - угол, отсчитываемый от начала коммутации. Выражение (2) представляет собой сложную функцию времени и углового положения якоря. Используя метод усреднения лг,, за период коммутации, получим 1 k,), к к xd + где ЙСР ИЛИ после подстановки Связь индуктивного сопротивления коммутации с величиной нагрузки устанавливается с помощью выражения ( + /7.), X к Щ где U и Г„ - напряжение и ток в нагрузке;А/7, - падение напряжения в вентиле; п - число последовательно включенных вентилей в проводящий период; н и - сопротивления нагрузки и вентиля. При этом для нулевой схемы Mf - Zn 1 - cosy ДЛЯ МОСТОВОЙ схемы Mf 3 1 - cosy Меняя величину нагрузки, можно получить различные значения индуктивного сопротивления коммутации, рассчитываемого по выражению (5) на основе измеренных значений тока и напряжения нагрузки и угла коммутации вентилей. Определение сопротивлений xd и xq (или соответственно xd и xq для Д1аши1 без демпферной клетки) про:водится посредством решения системы линейных алгебраических уравнений, составленных па основе выражения (4) и подстановки в них численных значений х и у. Достаточ но составить систему из двух уравнений при двух значениях нагрузки - выражение (1). Условием однозначности искомых индуктивных сопротивлений в полученных уравнениях является одинаковое магнитное состояние машины по пути замыкания результирующего магнитного потока. На чертеже приведена схема для осуществления предложенного способа. Якорную обмотку испытываемой машины 1 подсоединяют к неуправляемому выпрямителю 2, выполненному по мостовой или нулевой схемам. Выход вынрямителя подключен к нагрузке 3, например обмотке возбуждения бесщеточного синхронного генератора или двигателя. Для изменения величины нагрузки последовательно с ней вводят регулируемое обавочное сопротивление 4. Это сопротивление может быть выполнено из стандартных элементов сопротивлений. Напряжение и ток в нагрузке измеряют вольтметром и амперметром 5, включенным на зажимы шунта 6. Угол коммутации наиболее просто измерять с помощью осциллографа по кривым фазного тока и напряжения машины. Определение угла коммутации можно проводить также и другими измерительными устройствами, имеющими хорошие частотные характеристики. Напряжение на зажимах якоря измеряют вольтметром действующих значений. Устанавливают и поддерживают заданное магнитное состояние путем изменения тока в обмотке 7 возбуждения машины, питаемой от регулируемого источника 8 постоянного тока. Опыт проводят следующим образом. При одном значении нагрузки устанавливают напряжение якоря, определяемое заданным реимом работы машины. Измеряют угол коммутации, напряжение и ток в нагрузке. Затем в цепь нагрузки вводят такое добавочное сопротивление, чтобы угол коммутации отличался от ранее измеренного не менее, чем 20-30%. Напряжение на зажимах якоря устанавливают равным заданному в первом опыте. Измеряют те же величины, что и в первом опыте. Затем вычисляют индуктивные сопротивления коммутации и коэффициенты йь Й2, Ь{, &2 и путем решения системы уравнений (1) определяют искомые индуктивные сопротивления. Для другого режима работы синхронной машины, определяемого в данном случае величиной напряжения синхронной машины, опыт повторяют в той же последовательности. Таким образом, предлагаемый способ позволяет существенно упростить операцию определения переходных или сверхпереходных индуктивных сопротивлений синхронной машины практически во всем диапазоне возможных рабочих режимов. Наиболее естественен этот способ для синхронных машин, работающих на выпрямительную нагрузку, таких как синхронные возбудители бесщеточных синхронных машин и выпрямительные генераторы. Здесь может быть использован существующий выпрямитель. Так как при проведении испытаний бесщеточных мащин предусматриваются специальные токосъемиые устройства, то проблема доступа к вращающемуся якорю и обмотке возбуждения основной машины отсутствует. Для синхронных машии обычного исполнения могут быть использованы стандартные выпрямительные установки. В этом случае возможность осуществления этого способа определяется мощностью имеющегося преобразователя. Способ был проверен при испытании синхронных возбудителей электродвигателя типа БСДК 15-21-12 мощностью 200 квт синхронного генератора типа F355L-4 и на синхронной машине тина ГТА-50.
Формула изобретения
Снособ онределения индуктивных сонротивлений электрических машин, путем измерения ее параметров в рабочем режиме и последующих вычислений, отличающийся тем, что, с целью упрощения способа, электрическую машину подключают через выпрямитель к регулируемой нагрузке, устанавливают одно значение нагрузки и замеряют угол коммутации, затем устанавливают другое значение нагрузки и замеряют угол коммутации
при том же напряжении на зажимах якорной обмотки, носле чего определяют искомые параметры из системы уравнений
ai-Xi + bi-X2 Хк, , Xi + b2X2 лгк;
е di
З1п2у2
sin2Yi ,
+
+
uz
4у2
4Y, sin2Ya sin2vi
b, b2
4Y2
4Yi
X к,, XK, , И Yi, Y2 - индуктивные сопротивле15 НИН коммутации и углы коммутации для двух режимов соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Источник сейсмических сигналов | 1974 |
|
SU535532A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ СИНХРОННОЙ МАШИНЫ, ВКЛЮЧЕННОЙ В ЭЛЕКТРИЧЕСКУЮ СЕТЬ | 2014 |
|
RU2572108C1 |
| Способ определения синхронных индуктивных сопротивлений | 1975 |
|
SU559337A1 |
| Способ измерения синхронных индуктивных сопротивлений явнополюсного синхронного генератора | 1982 |
|
SU1064248A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ТУРБОГЕНЕРАТОРА С БЕСЩЕТОЧНЫМ ДИОДНЫМ ВОЗБУДИТЕЛЕМ | 1990 |
|
RU2011224C1 |
| Регулятор тока возбуждения длябЕСщЕТОчНОй СиНХРОННОй элЕКТРичЕСКОйМАшиНы | 1979 |
|
SU843145A1 |
| Синхронная электрическая машина с устройством измерения угла нагрузки | 1985 |
|
SU1246256A1 |
| Устройство для автоматического регулирования возбуждения бесщеточных синхронных машин | 1977 |
|
SU736330A1 |
| ГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 1972 |
|
SU326683A1 |
| Ротор бесщеточного возбудителя синхронной машины | 1978 |
|
SU771814A1 |
