П. Ф. Ардашев, М. И. Родакевич и В. П. Семашко. Устройство для электрического дистанционного
Заявлено 22 июля 193fi года за jYs 198302. Опубликовано 31 января 1937 года.
Задача дистанционного управления во многих случаях сводится к следующему: имеется некоторый исполнительный механизм (например, рулевой привод, регулятор паровой машины) и прибор управления, электрически связанный с исполнительным | векторные диаграммы, механизмом. Этот последний должен Как видно из фиг. 1, аноды тираприходить в движение в прямом или | тронов Т и Г, питаются от двух обратном направлении и остана- вторичных обмоток I и 2 трансфорвливаться в любом положении в соответствии с установкой прибора управления.
Из числа известных схем дистанционного управления можно отметить i
следующие основные:
1) индукционные (например, индук- I чена диагональ моста, состоящего из ционный передатчик фирмы Броун); I двух реохордов JRi и R и питаемого
разновидностью их является схема с двумя индукционными двигателями, статоры которых питаются от общей сети, а роторы включены навстречу;
2) реостатные (передатчик Сименса | Ис2 от обмотки 3 (см. векторную диас кольцевой трубкой и реостатный передатчик Гартмана и Брауна);
3) следящие системы с контактами.
Предлагаемое устройство близко к схеме реостатных передатчиков, но отличается применением в качестве индикатора тиратронов. Этим достигается высокая чувствительность
управления.
рл-,-.,-.-,.-. 1 I- L ; sJ . V. о . . . . I
П1 - I Т ,;, ,
. ,IJ|| I llvJ
Tz::;i;i4Ec;v,: §Ивл;.;3и;;А
схемы и возможность управления большими мошностями без промежуточных органов (реле и пр.).
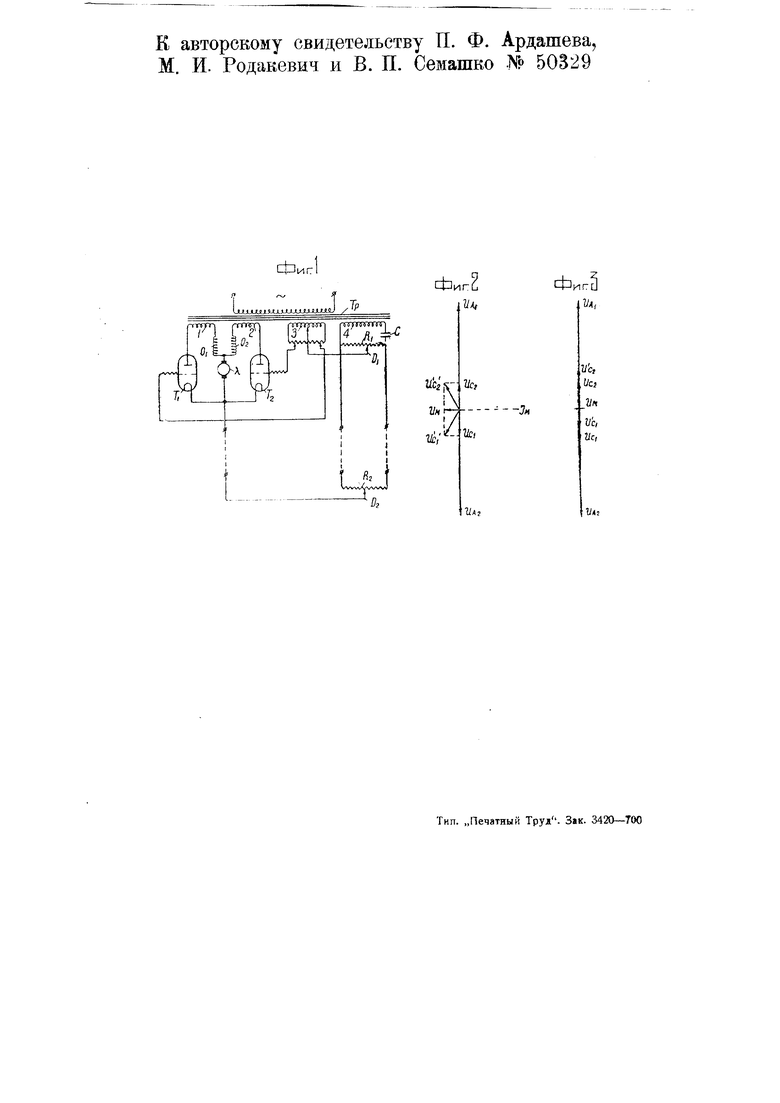
На чертеже фиг. 1 изображает схему иредлагаемого устройства, а фиг. 2 и 3-поясняюшие его работу
матора 7/7, причем векторы анодных напряжений UA и UAZ (фиг. 2 и 3) имеют разность фаз в 180. Обмотка 3 того же трансформатора подает на сетки тиратронов запирающее напряжение; последовательно с ней вклюобмоткой 4 того же трансформатора через конденсатор С. Если мост сбалансирован, то на сетки тиратронов подаются только напряжения U и
грамму на фиг. 2) и тиратроны заперты.
При разбалансировке моста на концах его диагонали появляется разность потенциалов (J.,,, сдвинутая относительно и на 90° благодаря конденсатору С. Таким образом, напряжения на сетках тиратронов
получают сдвиг по фазе-одно положительный, другое-отрицательный U,i и (фиг. 2). При этом тот из тиратронов, в котором сеточпое напряжение отстает от анодного, окажется открытым с начала полон ительного полупериода, анодный ток его пройдет через якорь реверсивного двигателя D и одну из его обмоток QI или Qs и двигатель начнет вращаться. Вал двигателя связан с движком Dg, который при вращении двигателя будет перемещаться до тех пор, пока мост не будет сбалансирован, после чего двигатель остановится. Таким образом каждое перемещение движка Д в приборе управления будет вызывать такое же перемещение движка DZ в исполнительном механизме.
Следует заметить, что другой тиратрон при разбалапсировке моста также отпирается, но это происходит в конце положительного полупериода анодного тока. Таким образом, через первую обмотку двигателя проходит полный анодпый ток первого тиратропа, через другую обмотку-ослабленный анодный ток второго тиратрона. Магнитный поток в двигателе определится разностью этих токов и через якорь, очевидно, пройдет сумма обоих токов.
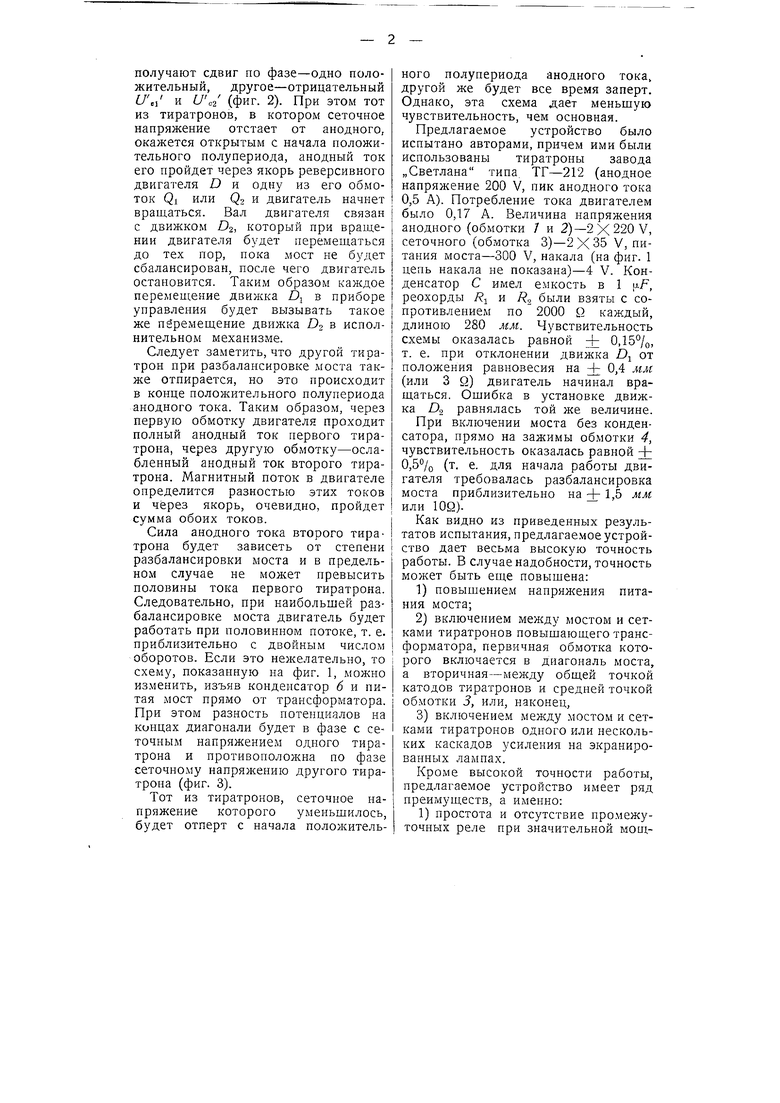
Сила анодного тока второго тиратрона будет зависеть от степени разбалансировки моста и в предельном случае не может превысить половины тока первого тиратрона. Следовательно, при наибольшей разбалансировке моста двигатель будет работать при половинном потоке, т. е. приблизительно с двойным числом оборотов. Если это нежелательно, то схему, показанную на фиг. 1, можпо измепить, изъяв конденсатор 6 и питая мост прямо от трансформатора, При этом разность потенциалов на концах диагонали будет в фазе с сеточным напряжением одного тиратрона и противоположна по фазе сеточному напряжению другого тиратрона (фиг. 3).
Тот из тиратронов, сеточное напряжение которого уменьшилось будет отперт с начала положительного полупериода анодного тока, другой же будет все время заперт. Однако, эта схема дает меньшую чувствительность, чем основная.
Предлагаемое устройство было испытано авторами, причем ими были использованы тиратроны завода „Светлана типа. ТГ-212 (анодное напряжение 200 V, пик анодного тока 0,5 А). Потребление тока двигателем было 0,17 А. Величина напряжения анодного (обмотки 7 и 2)-2X220V, сеточного (обмотка 3)-2X35 V, питания моста-300 V, накала (на фиг. 1 цепь накала не показана)-4 V. Конденсатор С имел емкость в 1 .F, реохорды и были взяты с сопротивлением по 2000 Q каждый, длиною 280 Л1М. Чувствительность схемы оказалась равной + 0,15%, т. е. при отклонении движка D- от положения равновесия на + 0,4 мм (или 3 Q) двигатель начинал вращаться. Ошибка в установке движка Do равнялась той же величине.
При включении моста без конденсатора, прямо на зажимы обмотки 4, чувствительность оказалась равной + 0,5% (т. е. для начала работы двигателя требовалась разбалансировка моста приблизительно па + 1 10Q).
Как видно из приведенных результатов испытания, предлагаемое устройство дает весьма высокую точность работы. В случае надобности, точность может быть еще повышена:
1)повышением напряжения питания моста;
2)включением между мостом и сетками тиратронов повышающего трансформатора, первичная обмотка которого включается в диагональ моста, а вторичная-между общей точкой катодов тиратронов и средней точкой обмотки 3, или, наконец,
3)включением между мостом и сетками тиратронов одного или нескольких каскадов усиления на экранированных лампах.
Кроме высокой точпости работы, предлагаемое устройство имеет ряд преимуществ, а именно:
1) простота и отсутствие промежуточных реле при значительной мощности двигателя . (тиратроны завода „Светлана ТГ-162 допускают нагрузку выпрямленным током 13А при величине постоянной составляющей напряжения 1600 V);
2)независимость точности работы от нагрузки исполнительного механизма в то время, как в индукционных и реостатных передатчиках положение исполнительной части зависит от действующих на нее сил;
3)незначительность усилия для перестановки прибора управления; в индукционных передатчиках это усилие равно нагрузке на исполнительную часть плюс потери;
4)малый расход меди на соединительные провода между прибором управления и исполнительным механизмом; необходимы, как видно из фиг. 1, три привода, по двум из которых идет ток порядка 0,05 А; а по третьему-порядка долей тА. Влияние сопротивления проводов может быть компенсировано включением
подгоночных катущек, так что сечение проводов может быть очень, малым.
Предмет изобретения.
Устройство для электрического дистанционного управления с применением равновесного моста из двух реохордов, питаемого переменным током, отличающееся тем, что на сетки двух питаемых переменным током тиратронов, кроме запирающего напряжения от специальной обмотки питающего трансформатора, подано смещающее напряжение, взятое с концов диагонали моста и отпирающее один или другой тиратрон в зависимости от направления разбалансировки моста, с той целью, чтобы включенный в анодные цепи тиратронов реверсивный двигатель снова приводил мост в положение равновесия.
к авторскому свидетельству П. Ф. Ардашева, М. И. Родакевич и В. П. Семашко П 50329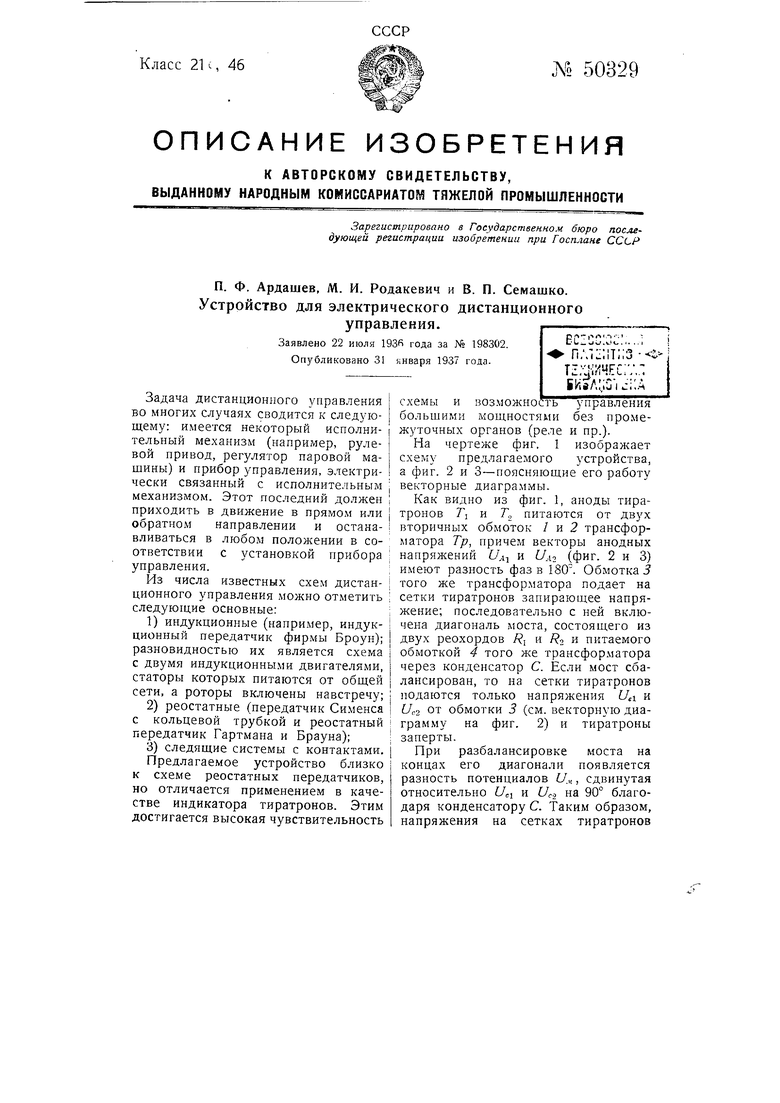
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1946 |
|
SU69386A1 |
| Устройство для испытания материалов на усталость | 1937 |
|
SU54154A1 |
| Электронный потенциометр переменного тока | 1945 |
|
SU67378A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1939 |
|
SU61119A1 |
| Устройство для автоматического регулирования температуры в промышленных печах | 1961 |
|
SU144648A1 |
| Тиратронный изодромный регулятор | 1952 |
|
SU103407A1 |
| Устройство для автоматического регулирования напряжения в выпрямительных установках | 1936 |
|
SU50894A1 |
| Универсальный игнитронный прерыватель | 1950 |
|
SU94552A1 |
| Устройство для контроля изоляции в сетях постоянного тока | 1941 |
|
SU64139A1 |
| Потенциометр переменного тока комплексного типа | 1948 |
|
SU75248A1 |